车辆控制装置的制作方法
1.本发明涉及一种对在侧面碰撞时产生的车辆行为进行控制的车辆控制装置。
背景技术:
2.作为与汽车等车辆的碰撞时的车辆控制相关的现有技术,在例如专利文献1中记载有如下内容:在碰撞时对经由差动装置而连结的左右驱动轮的一方进行制动,并通过左右驱动轮的制动驱动动力差而产生与因碰撞而产生的横摆相同方向的横摆力矩,缓和碰撞的冲击。
3.在专利文献2中记载有如下内容:在从即将侧面碰撞前到侧面碰撞后的车身加速度成为预定值以下为止的期间,对车辆的侧面碰撞相反一侧的后轮的制动力以比其他三个车轮的制动力高的方式控制。
4.在专利文献3中记载有如下内容:在因碰撞而在车辆产生转弯状态的情况下,通过对左右车轮中的一方进行制动来抑制转弯。
5.在专利文献4中记载有如下内容:在因碰撞而产生侧倾的情况下自动地产生制动力,并且在侧倾率高的情况下为了防止侧翻而降低制动力。
6.在专利文献5中记载有如下内容:为了减小侧面碰撞时的车辆侧倾方向的力,而停止abs控制而使车轮锁定,并使车轮的横向力减小。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开平9-142284号公报
10.专利文献2:日本特开2005-254944号公报
11.专利文献3:日本特开2002-316629号公报
12.专利文献4:日本特开2016-47672号公报
13.专利文献5:日本特开2005-178630号公报
技术实现要素:
14.技术问题
15.如专利文献1所记载的技术那样,在车辆受到侧面碰撞而产生了横摆行为的情况下,能够通过促进该横摆行为从而缓和碰撞的冲击。
16.但是,专利文献1所记载的技术以对车辆的驱动轮中的左右一方进行制动为前提,在例如两轮驱动的车辆的情况下,只能使前后轮中的某一方产生促进横摆行为的效果,而难以应对多种碰撞方式。
17.另外,在专利文献2所记载的技术中,根据碰撞预测位置来切换制动的车轮,但是在任何情况下都对车宽方向上的与碰撞侧相反的一侧的车轮进行制动,向车身碰撞的输入位置与成为横摆行为的支点的制动轮的距离远,难以得到较高的横摆角速度。
18.鉴于上述问题,本发明的课题在于提供一种通过制动装置的控制来减轻侧面碰撞
时的损伤的车辆控制装置。
19.技术方案
20.为了解决上述课题,本发明的一个方式的车辆控制装置的特征在于,所述车辆控制装置具备:制动控制部,其能够单独地控制设置于左右前轮和左右后轮的制动装置的制动力;侧面碰撞检测部,其检测向本车辆的侧面碰撞;以及横摆行为检测部,其检测车身的横摆行为,所述制动控制部执行横摆放大控制,所述横摆放大控制在所述侧面碰撞之后检测到车身后部相对于车身前部而向与碰撞侧相反的一侧位移的方向上的横摆行为的情况下,使碰撞侧的前轮的制动装置产生比其他车轮的制动装置大的制动力,在所述侧面碰撞之后检测到车身前部相对于车身后部而向与碰撞侧相反的一侧位移的方向上的横摆行为的情况下,使碰撞侧的后轮的制动装置产生比其他车轮的制动装置大的制动力。
21.由此,根据因侧面碰撞而产生的横摆行为的方向来决定对前轮或后轮中的哪一个进行制动,并且通过在车宽方向上对碰撞侧的前轮或后轮进行制动,而能够使以被制动的车轮为支点(轴)的横摆行为放大。
22.另外,通过在车宽方向上对碰撞侧的车轮进行制动,从而成为支点的车轮(被制动的车轮)与碰撞输入位置之间的距离接近而配置。因此,能够产生较高的横摆角速度,能够有效地缓和由碰撞所引起的冲击,并且能够使本车辆迅速地位移到能够使碰撞车辆通过的位置。
23.在本发明中,能够构成为所述车辆控制装置具备识别本车辆周围的环境的环境识别部,所述制动控制部在所述环境识别部在本车辆的附近识别到风险对象物的情况下,禁止所述横摆放大控制。
24.由此,能够防止横摆行为被放大的结果成为旋转状态的本车辆与例如行人和/或自行车等风险对象物碰撞而产生二次损伤。
25.在本发明中,能够构成为所述侧面碰撞检测部具有检测所述侧面碰撞的发生或前兆的功能,所述制动控制部根据所述侧面碰撞的发生或前兆,而在执行所述横摆放大控制之前,执行使碰撞侧的前轮和后轮的制动装置产生制动力的侧倾抑制控制。
26.由此,通过使碰撞侧的前轮和后轮的制动装置产生制动力,并相对于路面而在前后方向上限制这些车轮,从而能够产生通常在移动时阻碍伴随车轮的前后位移的悬架装置的移动的摩擦力。由此,能够抑制因侧面碰撞而产生的碰撞侧下降的方向的侧倾行为、以及因其反弹而引起的碰撞侧上升的方向的侧倾行为,并能够实现碰撞后的车身行为的稳定化。
27.在本发明中,能够构成为所述制动控制部在执行所述横摆放大控制之后,与因侧面碰撞而引起的本车辆的行为的结束对应地,以使本车辆保持为停止状态的方式控制各车轮的制动装置。
28.由此,能够防止在碰撞后车辆违背驾驶员等用户的意愿而开始移动,并且能够进一步提高安全性。
29.发明效果
30.如上所述,根据本发明,能够提供通过制动装置的控制来减轻侧面碰撞时的损伤的车辆控制装置。
附图说明
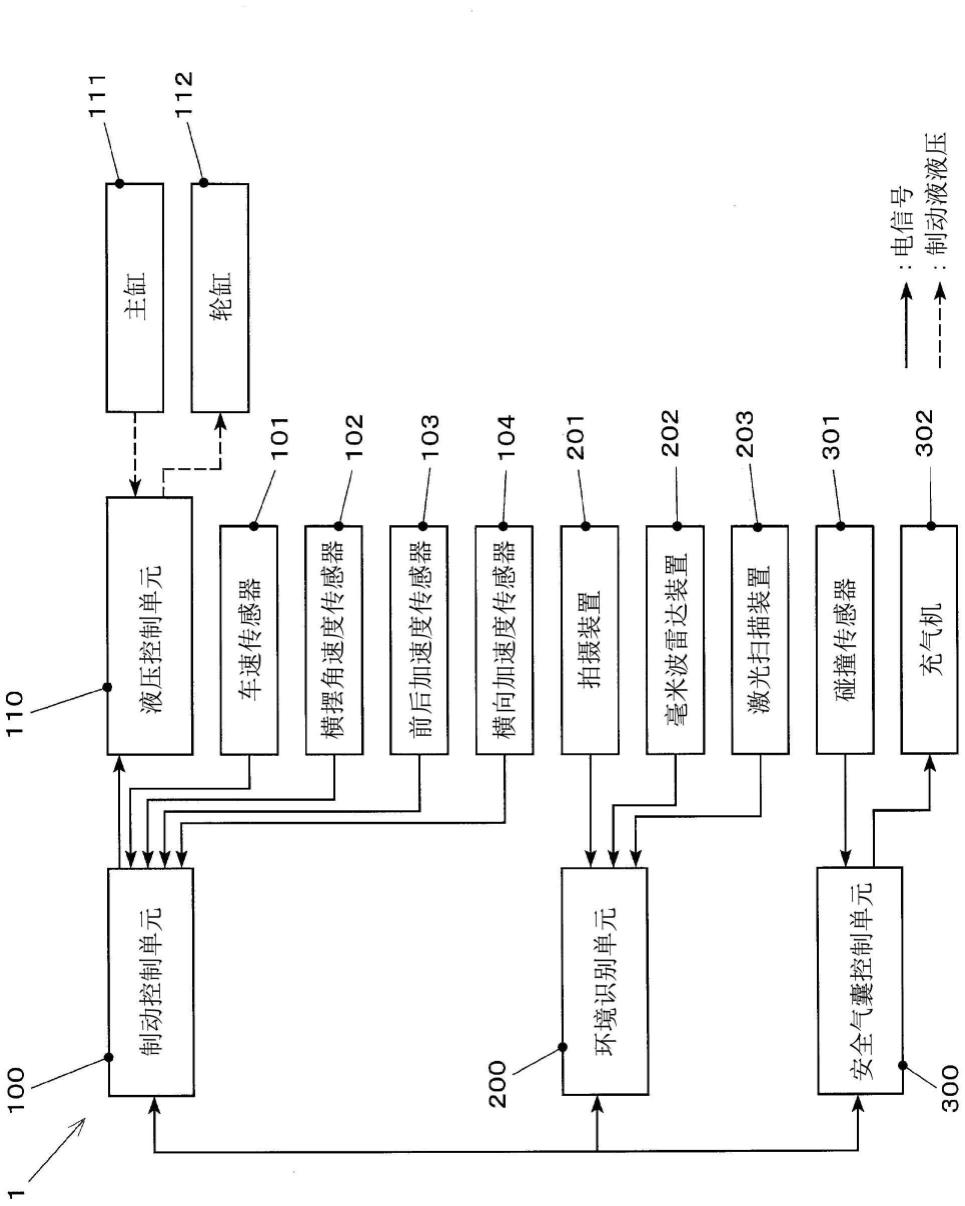
31.图1为示意性地示出应用了本发明的车辆控制装置的实施方式的构成的框图。
32.图2为示出实施方式的车辆控制装置的动作的流程图。
33.图3为以时间序列示意性地示出侧面碰撞时的车辆的行为的一例的图。
34.符号说明
35.1:车辆控制装置
36.100:制动控制单元
37.101:车速传感器
38.102:横摆角速度传感器
39.103:前后加速度传感器
40.104:横向加速度传感器
41.110:液压控制单元
42.111:主缸
43.112:轮缸
44.200:环境识别单元
45.201:拍摄装置
46.202:毫米波雷达装置
47.203:激光扫描装置
48.300:安全气囊控制单元
49.301:碰撞传感器
50.302:充气机
51.v1:本车辆
52.v2:其他车辆
具体实施方式
53.以下,对应用了本发明的车辆控制装置的实施方式进行说明。
54.实施方式的车辆控制装置是搭载于例如乘用车等汽车的装置。
55.实施方式的车辆控制装置具有如下功能:在本车辆与其他车辆等物体侧面碰撞的情况下,进行促进车身的横摆行为来缓和由碰撞所引起的冲击的横摆放大控制、以及抑制侧倾的侧倾抑制控制等。
56.图1为示意性地示出实施方式的车辆控制装置的构成的框图。
57.车辆控制装置1具有制动控制单元100、液压控制单元110、环境识别单元200、以及安全气囊控制单元300等。
58.各单元能够构成为具有例如cpu等信息处理部、ram和/或rom等存储部、输入输出接口、以及将它们连接的总线等的微型计算机。
59.另外,各单元经由例如can通信系统等车载lan或者直接地进行通信,而能够传递各种信息。
60.制动控制单元100是对设置于车辆的各车轮的未图示的液压式行车制动器(制动装置)进行控制的制动控制部。
61.制动控制单元100通过向液压控制单元110给予指令,而能够单独地控制各车轮的轮缸112中的制动液液压,使各车轮的行车制动器产生制动力。
62.在制动控制单元100连接有车速传感器101、横摆角速度传感器102、前后加速度传感器103、横向加速度传感器104等用于检测车辆的运动状态的物理传感器。
63.车速传感器101是检测各车轮的旋转速度(车轮速度)的传感器。能够基于车速传感器101的输出而运算车辆的行驶速度。
64.横摆角速度传感器102是检测作为车身的围绕铅直轴的旋转速度(自转速度)的横摆角速度的横摆行为检测部。
65.前后加速度传感器103是检测作用于车身的前后方向的加速度的传感器。
66.横向加速度传感器104是检测作用于车身的横向(车宽方向)的加速度的传感器。
67.这些各传感器的输出用于以下说明的防抱死制动控制、姿势稳定化控制、横摆放大控制等各种车辆运动控制。
68.防抱死制动控制是例如在制动时发生了车轮抱死的情况下,对该车轮的制动液液压进行减压而使车轮的旋转恢复的控制。
69.姿势稳定化控制是在车辆产生了转向过度行为或转向不足行为的情况下,使左右的车轮产生制动力差,并产生抑制这些行为的方向的横摆力矩的控制。
70.制动控制单元100基于由未图示的转向角传感器检测出的转向角、由车速传感器101检测出的车速、由横向加速度传感器104检测出的横向加速度等,来计算作为在正常的行驶时可能在车身产生的横摆角速度的目标横摆角速度。
71.制动控制单元100根据由横摆角速度传感器102检测出的实际的横摆角速度(实际横摆角速度)与目标横摆角速度之间的偏差,来设定由制动力的控制产生的横摆力矩的朝向和大小。
72.在实际横摆角速度的绝对值比目标横摆角速度的绝对值小的情况下,作为转向不足行为正在发生的情况而产生与转向装置的向转向角方向(转向方向)的横摆角速度同一方向的横摆力矩。
73.另一方面,在实际横摆角速度的绝对值比目标横摆角速度的绝对值大的情况下,作为转向过度行为正在发生的情况而产生与转向装置的向转向方向的横摆角速度相反方向的横摆力矩。
74.制动控制单元100具有在车辆1产生了伴随预定以上的冲击(加速度等)的碰撞时,进行使制动力自动地产生而使车辆1减速、停车的碰撞后制动控制(后碰撞(post crash)制动控制/多重碰撞制动控制)的功能。
75.另外,制动控制单元100具有在其他车辆等物体与本车辆的侧面部碰撞的侧面碰撞的情况下,进行抑制因碰撞而引起的侧倾行为的侧倾抑制控制、以及促进因碰撞而引起的横摆行为的横摆放大控制的功能。
76.关于这些方面,将在后面详细地说明。
77.液压控制单元110是单独地调节各车轮的轮缸112的制动液液压的液压控制装置。
78.液压控制单元110具备:对制动液进行加压的电动泵、以及控制各轮缸112的制动液液压的增压阀、减压阀、压力保持阀等。
79.在液压控制单元110经由制动液配管连接有主缸111、轮缸112等。
80.主缸111是根据驾驶员进行制动操作的未图示的制动踏板的操作,对制动液进行加压的装置。
81.主缸111产生的制动液液压经由液压控制单元110而被传递到轮缸112。
82.液压控制单元110具有通过根据需要对主缸111产生的制动液液压进行加压、减压来增减各轮缸112的制动液液压的功能。
83.轮缸112是设置于各车轮,将例如刹车片按压到盘式转子(disc rotor)等,而产生与制动液液压对应的摩擦力(制动力)的装置。
84.环境识别单元200具有如下功能:使用各种传感器类来识别本车辆的周围的环境,并检测周围的道路形状、存在于本车辆的附近的其他车辆、行人、建筑物、地形等障碍物的有无、以及在存在障碍物的情况下相对于该本车辆的相对位置、相对速度等。
85.作为检测本车辆的周围的物体等的传感器,在环境识别单元200连接有拍摄装置201、毫米波雷达装置202、激光扫描装置203等。
86.摄像装置201具有立体相机、单目相机等。
87.环境识别单元200能够通过对拍摄装置201拍摄到的图像实施公知的图像处理来识别本车辆周围的物体,并且判别物体的属性(车辆、行人、建筑物等)。
88.毫米波雷达装置202是使用例如76ghz频带等的电波来检测物体的装置。
89.激光扫描装置203是通过射出脉冲状的激光来扫描本车辆周围,并检测因其反射而产生的散射光,从而检测出物体的装置。
90.安全气囊控制单元300是设置于车辆的驾驶室内,并对作为在碰撞时限制乘员的乘员限制装置的安全气囊的展开膨胀进行控制的单元。
91.安全气囊通过由例如尼龙纤维构成的基布形成为袋状,并在通常时以折叠的状态收纳于内饰部件,并且在碰撞时通过导入展开用气体而展开膨胀,限制乘员等。
92.在安全气囊控制单元300连接有碰撞传感器301、充气机302等。
93.碰撞传感器301是在车身的各部设置有多个,并检测在碰撞时作用于车身的前后方向、横向的显著的加速度的传感器。
94.碰撞传感器301与安全气囊控制单元300协作,作为碰撞检测部而发挥功能。
95.安全气囊控制单元300基于碰撞传感器301的输出,判别有无发生安全气囊需要展开膨胀的前面碰撞和/或侧面碰撞。安全气囊控制单元300作为本发明的侧面碰撞检测部发挥功能。
96.充气机302是根据来自安全气囊控制单元300的指令,向设置于车辆的各安全气囊供给展开用气体的气体产生装置。
97.以下,对实施方式的车辆控制装置的侧面碰撞时的动作进行说明。
98.图2为示出实施方式的车辆控制装置的动作的流程图。
99.以下,针对每个步骤按顺序进行说明。
100.《步骤s01:碰撞判定》
101.安全气囊控制单元300基于碰撞传感器301的输出,判别是否其他车辆等物体以预定以上的强度(例如在本车辆的车身所产生的加速度为预定以上)对本车辆进行了碰撞。
102.例如,能够在检测到为了判别安全气囊是否需要展开而预先设定的阈值以上的加速度的情况下,使碰撞判定成立。
103.在判别有预定以上的强度的碰撞的情况下,作为碰撞判定成立的条件而进入步骤s02,在其他情况下进入步骤s10。
104.《步骤s02:大规模侧面碰撞判断》
105.安全气囊控制单元300判别在步骤s01中判定的碰撞是否为预定以上的大规模的侧面碰撞。
106.例如,在车身的横向加速度为预先设定的阈值以上的情况下,判别为发生了大规模的侧面碰撞。
107.在判别有大规模的侧面碰撞的情况下进入步骤s03,在其他情况下进入步骤s10。
108.《步骤s03:碰撞侧前后轮制动控制》
109.制动控制单元100向液压控制单元110给予指令,使车宽方向上的碰撞侧(例如,在本车辆左侧面受到碰撞的情况下为左侧)的前轮和后轮的制动器产生制动力。
110.此时,车宽方向上的相反碰撞侧的前轮和后轮的制动器处于实质上不产生制动力的释放状态。
111.这样的控制作为抑制因侧面碰撞而引起的车身的侧倾行为的侧倾抑制控制而发挥功能。
112.通常地,受到侧面碰撞的车辆在碰撞侧的悬架暂时向碰撞侧(收缩侧)移动而使车身下沉之后,通过悬架弹簧的反作用力而使悬架向回弹侧(伸长侧)移动,从而表现出车身抬起的侧倾行为。
113.这样的侧倾行为从碰撞后的车身行为的稳定化的观点出发并不是优选的,另外,如果该行为变得显著,则也可能成为车辆的侧翻的原因。
114.另一方面,对于车辆的悬架装置而言,因例如进行车轮的前后方向定位的推力杆的倾斜等,而表现出在通常移动时车轮相对于车身在前后方向上位移的行为。
115.因此,如果对车轮进行制动来限制相对于路面的前后位移,则能够产生阻碍悬架装置的移动的摩擦力,通过上述的控制而能够抑制车身的侧倾行为。
116.此后,进入步骤s04。
117.《步骤s04:碰撞后经过时间判断》
118.安全气囊控制单元300将从碰撞发生起算的经过时间与预先设定的阈值t1秒进行比较。
119.阈值t1在例如一般的侧面碰撞中,考虑在碰撞发生后直到因碰撞而引起的车身行为结束为止的时间来设定。
120.在从碰撞发生起算的经过时间经过阈值t1秒的情况下进入步骤s10,在其他情况下进入步骤s05。
121.《步骤s05:有无行人判断》
122.环境识别单元200判别在本车辆的周边(特别是本车辆因碰撞后的行为而行进的方向)有无例如行人等风险对象物。
123.在存在风险对象物的情况下进入步骤s06,在其他情况下返回步骤s03并重复以后的处理。
124.《步骤s06:横摆角速度判断》
125.制动控制单元100通过横摆角速度传感器102检测出车身的横摆角速度,并将其与
预先设定的阈值进行比较。
126.在横摆角速度为阈值以上的情况下,作为横摆行为正在发生的情况而进入步骤s07,在其他情况下返回步骤s03并重复以后的处理。
127.《步骤s07:执行横摆放大控制》
128.制动控制单元100结束侧倾抑制控制,执行用于放大(促进)因侧面碰撞而产生的横摆行为的横摆放大控制。
129.制动控制单元100从横摆角速度传感器102获取与当前的车身横摆角速度相关的信息。
130.在基于横摆角速度而掌握的车身的横摆行为是车身后部相对于车身前部而向与碰撞侧相反的一侧位移的方向的情况下,制动控制单元100对碰撞侧的前轮进行制动,并且将除此以外的车轮设为非制动状态。
131.在车身的横摆行为是车身前部相对于车身后部而向与碰撞侧相反的一侧位移的方向的情况下,制动控制单元100对碰撞侧的后轮进行制动,并且将除此以外的车轮设为非制动状态。
132.由此,对于车辆而言,以被制动的车轮为支点的横摆行为被放大,横摆角速度被加速。
133.此后,进入步骤s08。
134.《步骤s08:碰撞避免判定》
135.制动控制单元100判别本车辆是否躲避了与其他车辆之间的碰撞。
136.例如,在横摆角速度传感器102检测出的横摆角速度、以及前后加速度传感器103和横向加速度传感器104分别检测出的加速度均成为预先设定的阈值以下时,判别为是结束了基于横摆行为的躲避其他车辆的状态(碰撞避免状态)。
137.在判别为是碰撞避免状态(碰撞避免判定成立)的情况下进入步骤s09,在其他情况下返回步骤s07并重复以后的处理。
138.《步骤s09:四轮制动停止保持》
139.制动控制单元100结束横摆放大控制,并使左右的前轮、后轮的制动器全部产生制动力,将车辆保持为停止状态。
140.以该状态经过一定时间,或者由驾驶员等用户输入有解除停止状态的操作之后,进入步骤s10。
141.《步骤s10:正常驾驶》
142.制动控制装置100等构成车辆控制装置1的各单元被设为车辆的通常驾驶时的控制状态。
143.此后,结束(返回)一系列的处理。
144.图3为以时间序列示意性地示出侧面碰撞时的车辆的行为的一例的图。
145.图3示出其他车辆v2沿着本车辆v1的车宽方向与本车辆v1的左侧面部侧面碰撞的状态。
146.应予说明,在本车辆v1中,标记有阴影的车轮表示产生制动力。
147.图3a示出碰撞发生时的状态。
148.此时,制动控制单元100使碰撞侧(左侧)的前轮和后轮产生制动力。
149.由此,能够抑制因侧面碰撞而引起的本车辆v1的侧倾行为,并且能够实现此后的车身行为的稳定化。
150.在图3所示的情况下,其他车辆v2相对于本车辆v1的重心位置与车辆后方侧碰撞,其结果,在本车辆v1产生车身后部相对于车身前部向相反碰撞侧(在此,为右侧)位移的方向(逆时针)的横摆行为。
151.图3b示出本车辆v1产生了横摆行为的状态。
152.在该状态下,制动控制单元100使左前轮产生制动力。
153.由此,本车辆v1示出以左前轮为支点的急剧的横摆行为,并从其他车辆v2的行进路上退避。
154.应予说明,在本车辆v1的周围存在行人等风险对象物的情况下,这样的横摆放大控制被禁止。
155.图3c示出本车辆v1完成了躲避其他车辆v2的状态(碰撞避免判定成立的状态)。
156.在该状态下,制动控制单元100使所有车轮产生制动力。
157.如以上说明的那样,根据本实施方式,能够得到以下的效果。
158.(1)根据因侧面碰撞而产生的横摆行为的方向来决定对前轮或后轮中的哪一个进行制动,并且通过进行在车宽方向上对碰撞侧的前轮或后轮进行制动的横摆放大控制,而能够使以被制动的车轮为支点(轴)的横摆行为放大。
159.另外,通过在车宽方向上对碰撞侧的车轮进行制动,从而使成为支点的车轮(被制动的车轮)与碰撞输入部位之间的距离接近而配置。因此,能够产生较高的横摆角速度,能够有效地缓和由碰撞所引起的冲击,并且能够使本车辆迅速地位移到能够使碰撞车辆通过的位置。
160.(2)通过在环境识别单元200检测到行人等风险对象物的情况下禁止横摆放大控制,从而能够防止横摆行为被促进的结果成为旋转状态的本车辆与例如行人等风险对象物碰撞而产生二次损伤。
161.(3)通过根据侧面碰撞的产生而进行使碰撞侧的前轮和后轮的制动装置产生制动力的侧倾抑制控制,并相对于路面而在前后方向上限制这些车轮,从而能够产生通常在移动时阻碍伴随车轮的前后位移的悬架装置的移动的摩擦力,能够抑制因侧面碰撞而产生的碰撞侧下降的方向的侧倾行为、以及因其反弹而引起的碰撞侧上升的方向的侧倾行为,并且能够实现碰撞后的车身行为的稳定化。
162.(4)在执行横摆放大控制之后,与因侧面碰撞而引起的本车辆的行为的结束(碰撞避免判定的成立)对应地,通过以使本车辆保持为停止状态的方式使制动力产生于所有车轮,从而能够防止在碰撞后车辆违背驾驶员等用户的意愿而开始移动,并且能够进一步提高安全性。
163.(变形例)
164.本发明并不限于以上说明的实施方式,能够进行各种变形和/或变更,并且它们也在本发明的技术范围内。
165.(1)车辆控制装置和车辆的构成并不限于上述实施方式,能够进行适当变更。
166.例如,向各单元的功能的分配是一例,并能够进行适当变更。
167.例如,在实施方式中,安全气囊控制单元300使用碰撞传感器301的输出而进行碰
撞判定,但也可以取而代之,或者与其组合使用,基于车速传感器101、横摆角速度传感器102、纵向加速度传感器103、横向加速度传感器104等车辆的运动控制用的物理传感器的输出而进行碰撞判定。
168.(2)在实施方式中,通过液压式行车制动器进行侧面碰撞后的各种制动控制中的制动力的产生,但不限于此,也可以使用例如利用了电动发电机的再生发电制动器、能够进行动态制动的电动驻车制动器等电动制动器来产生制动力。
169.(3)在实施方式中,在发生侧面碰撞之后开始侧倾抑制控制,但不限于此,也可以构成为将例如环境识别单元等用作侧面碰撞检测部,在检测到侧面碰撞的前兆的情况下,在实际的碰撞发生之前开始侧倾抑制控制。
170.(4)在实施方式中,在执行横摆放大控制时,除了进行制动的车轮(成为横摆行为的支点的车轮)以外不产生制动力,但不限于此,也可以使其他车轮也产生不阻碍横摆行为的程度的比较小的制动力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1