一种运输机器人的制作方法
1.本实用新型涉及运输领域,特别涉及一种运输机器人。
背景技术:
2.当前,全自动运输机器人的应用越来越广泛,其优势是:可替代越来越高的人力成本,耐用度高、无疲倦感,而且可在污染环境、危险环境中执行任务,以及可执行对人体有伤害的任务。
3.而运输机器人因为内部结构复杂,且部件繁多,在长时间工作后,内部会产生大量热量,导致内部温度过高,温度过高后会引起一些关键性部件的损坏,导致运输机器人无法工作,且在运输过程中,在一些凹凸不平的路段行驶、行人的突然停止和一些临时摆放的物品,可能会导致运输机器人撞上或所运输物品上下抖动,导致运输机器人损坏或所运输的物品损坏。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的缺陷,提供一种运输机器人。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.本实用新型一种运输机器人,包括运输槽、底座和导向装置,所述运输槽安装于导向装置一端,所述底座安装于运输槽的底端,所述导向装置顶端安装有出风口,所述出风口两侧各安装有一个无线传输天线,所述导向装置的一端表面安装有触摸控制显示屏,所述触摸控制显示屏底侧安装有距离传感器,所述底座的一端表面安装有进风口,所述导向装置的内部安装有温度传感器,所述温度传感器底侧安装有风扇,所述风扇底侧安装有处理芯片,所述风扇的内部安装有驱动转机。
7.作为本实用新型的一种优选技术方案,所述驱动转机与处理芯片为电性连接,所述温度传感器与处理芯片为电性连接,所述驱动转机与风扇为传动连接。
8.作为本实用新型的一种优选技术方案,所述导向装置与底座内部空间相通,所述风扇吹风方向正对出风口,所述进风口设置有过滤网。
9.作为本实用新型的一种优选技术方案,所述底座内部安装有七个减震器,所述底座两侧各安装有两个车轮,所述车轮的一侧安装有刹车装置,所述刹车装置安装于底座内部。
10.作为本实用新型的一种优选技术方案,所述触摸控制显示屏上可触摸选取行驶终点,所述距离传感器与处理芯片为电性连接,所述处理芯片与刹车装置为电性连接,所述无线传输天线与处理芯片为电性连接,所述距离传感器感应前方物品与运输机器人之间的距离。
11.作为本实用新型的一种优选技术方案,所述运输槽为盒状上开口结构,所述运输槽内部用于放置所需运输的物品,所述运输槽内壁表面设置有柔软防撞层。
12.作为本实用新型的一种优选技术方案,所述处理芯片一侧安装有电池槽,所述电
池槽一端设置有充电口,所述电池槽内部设置有可充电电池,所述充电口用于电池槽内部电池充电。
13.与现有技术相比,本实用新型的有益效果如下:
14.本实用新型通过风扇和温度传感器的设置,利用热空气向上的原理,通过加快内部空气循坏的方式,完成加快散热的效果,且通过距离传感器防止运输机器人在运输过程中撞上行人或临时放置的物品,通过减震器和柔软防撞层放置运输过程中物品损坏,且机构简单,组装成本低。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
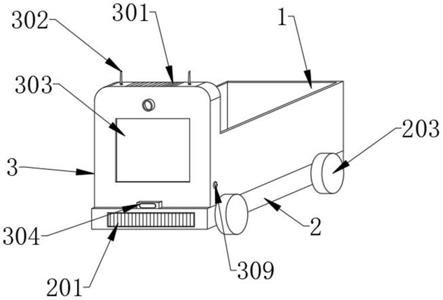
16.图1是本实用新型的整体结构示意图;
17.图2是本实用新型的导向装置结构剖视图;
18.图3是本实用新型的底座结构横剖图;
19.图4是本实用新型的底座结构侧剖图;
20.图中:1、运输槽;2、底座;201、进风口;202、减震器;203、车轮; 204、刹车装置;3、导向装置;301、出风口;302、无线传输天线;303、触摸控制显示屏;304、距离传感器;305、温度传感器;306、风扇;3061、驱动转机;307、处理芯片;308、电池槽;309、充电口。
具体实施方式
21.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
22.其中附图中相同的标号全部指的是相同的部件。
23.实施例1
24.如图1
‑
4所示,本实用新型提供一种运输机器人,包括运输槽1、底座2 和导向装置3,运输槽1安装于导向装置3一端,底座2安装于运输槽1的底端,导向装置3顶端安装有出风口301,出风口301两侧各安装有一个无线传输天线302,导向装置3的一端表面安装有触摸控制显示屏303,触摸控制显示屏303底侧安装有距离传感器304,底座2的一端表面安装有进风口201,导向装置3的内部安装有温度传感器305,温度传感器305底侧安装有风扇 306,风扇306底侧安装有处理芯片307,风扇306的内部安装有驱动转机3061。
25.进一步的,驱动转机3061与处理芯片307为电性连接,温度传感器305 与处理芯片307为电性连接,驱动转机3061与风扇306为传动连接,导向装置3与底座2内部空间相通,风扇306吹风方向正对出风口301,进风口201 设置有过滤网,运输机器人在运行过程中,内部部件在工作状态时会产生大量热量,因为热空气向上,所以热空气都会集中在导向装置3内部顶端,热空气会从导向装置3顶端设置的出风口301流出,而当热空气过多,出风口 301流出效率较慢,内部堆积热空气过多时,内部温度升高,温度传感器305 将检测到的温度信息传递至处理芯片307,当内部温度升高到一定值后,处理芯片307控制驱动转机3061启动,驱动转机3061带动风扇306转动,使热空气从出风口301流出速度加快,而后外界的冷空气再从进风口201进入,完成循坏,风扇306的启动加快循坏,使内部加快散热,防止运输机器人
内部部件因温度过高导致损坏,过滤网的设置可有效防止大量灰尘从进风口201 进入,导致运输机器人内部灰尘堆积过多。
26.底座2内部安装有七个减震器202,底座2两侧各安装有两个车轮203,车轮203的一侧安装有刹车装置204,刹车装置204安装于底座2内部,触摸控制显示屏303上可触摸选取行驶终点,距离传感器304与处理芯片307为电性连接,处理芯片307与刹车装置204为电性连接,无线传输天线302与处理芯片307为电性连接,距离传感器304感应前方物品与运输机器人之间的距离,当使用者将所需运输的物件放置到运输槽1内后,在触摸控制显示屏303上确定所需运输到的地点,处理芯片307通过无线传输天线302将信息传输到终端,终端通过计算得到最佳的行驶路径,将路径再通过无线传输天线302传输给处理芯片307,处理芯片307控制车轮203转动,完成运输,减震器202的设置可防止在凹凸不平的路段行驶时,将运输槽1内所运输的物品损坏,距离传感器304实时监控前方,当距离传感器304检测到前方有物品挡住时,会将信息传递至处理芯片307,处理芯片307控制刹车装置204 启动,刹车装置204将车轮203卡死,使运输机器人停止,等待前方行人通过或物品搬运走,若长时间停止,处理芯片307会将信息传递至终端,有终端工作人员判断下一步行动。
27.运输槽1为盒状上开口结构,运输槽1内部用于放置所需运输的物品,运输槽1内壁表面设置有柔软防撞层,运输槽1用于放置所需运输的物品,柔软防撞层防止内部物品在运输过程中发生磕碰导致损坏。
28.处理芯片307一侧安装有电池槽308,电池槽308一端设置有充电口309,电池槽308内部设置有可充电电池,充电口309用于电池槽308内部电池充电,电池槽308内部设置的电池为运输机器人整体供电,当电池电量不足时,可通过充电口309进行充电,补充电量。
29.具体的,使用者需要使用运输机器人时,将所需运输的物件放置到运输槽1内后,在触摸控制显示屏303上确定所需运输到的地点,处理芯片307 通过无线传输天线302将信息传输到终端,终端通过计算得到最佳的行驶路径,将路径再通过无线传输天线302传输给处理芯片307,处理芯片307控制车轮203转动,完成运输,底座2内部的减震器202与运输槽1内壁表面的柔软防撞层的设置均为了可防止在凹凸不平的路段行驶时,将运输槽1内所运输的物品损坏,距离传感器304实时监控前方,当距离传感器304检测到前方有物品挡住时,会将信息传递至处理芯片307,处理芯片307控制刹车装置204启动,刹车装置204将车轮203卡死,使运输机器人停止,等待前方行人通过或物品搬运走,若长时间停止,处理芯片307会将信息传递至终端,有终端工作人员判断下一步行动。
30.运输机器人在运行过程中,内部部件在工作状态时会产生大量热量,因为热空气向上,所以热空气都会集中在导向装置3内部顶端,热空气会从导向装置3顶端设置的出风口301流出,冷空气再由进风口201进入,完成空气的循坏,进行散热,而当热空气过多,出风口301流出效率较慢,内部堆积热空气过多时,内部温度升高,温度传感器305将检测到的温度信息传递至处理芯片307,当内部温度升高到一定值后,处理芯片307控制驱动转机 3061启动,驱动转机3061带动风扇306转动,使热空气从出风口301流出速度加快,而后外界的冷空气再从进风口201进入,完成循坏,风扇306的启动加快循坏,使内部加快散热,防止运输机器人内部部件因温度过高导致损坏,运输机器人内部部件都通过电池槽308内部电池充电,电池使用充电口 309补充电量。
31.本实用新型通过风扇306和温度传感器305的设置,利用热空气向上的原理,通过
加快内部空气循坏的方式,完成加快散热的效果,且通过距离传感器304防止运输机器人在运输过程中撞上行人或临时放置的物品,通过减震器202和柔软防撞层放置运输过程中物品损坏,且机构简单,组装成本低。
32.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1