一种动车组长轴侧齿轮箱检修自动定位夹紧系统及方法与流程
1.本发明属于动车组齿轮箱检修技术领域,更具体地,涉及一种动车组长轴侧齿轮箱检修自动定位夹紧系统及方法。
背景技术:
2.中国高铁目前主要用到的长轴侧齿轮箱只有一种,那就是早期从德国引进的crh380b(l)动车组,该种齿轮箱和目前国产复兴号的齿轮箱相反,在齿轮箱上下箱体与左右轴承座合箱后,其两侧大齿轮的游隙调整垫设计在短轴侧,故需要先安装长轴侧的齿轮箱座,然后把齿轮箱轴竖起来,然后再安装并调整齿轮箱轴长轴侧的游隙调整垫和长轴侧的轴承座盖等,但现有技术的作业存在以下缺点:
3.首先,对车间层高要求高。无论是合箱还是游隙调整工位,都需要天车来吊轴工件或依靠天车来施力进行游隙测评,需要作业车间内有较高的层高来容纳天车吊钩、吊绳以及工件上安装的吊具来实现,对于一些后期改造层高较低的检修车间不适应。其次,人工参与多,劳动强度相对较大。作业过程需要较多的人工参与的步骤较多,比如在合箱工位为了防止工件倾覆,需要人工用v型钢支架支撑住齿轮箱轴,合箱作业完毕后,还要人工去除钢支架;在游隙调整工序,需要人工掀开地面盖板,等作业完成后再次人工盖好地坑盖板;整个作业过程劳动强度较大;其次,由于工序依靠人工来完成,如果人工犯错有可能造成工件倾倒或设备运行干涉故障;又存在人与翻转机的交互作业,存在大型设备碰伤作业人员的风险。再次,检修数据智能化管理薄弱,检修过程缺乏流程引导。目前现场检修数据采用人工记录方式,轴承游隙调整的合格与否依靠工人的经验和感觉,存在人为误差,对操作者的技能和熟练程度要求高,不能形成完整流程的检修数据流供质量卡控、检修过程分析、优化检修管理使用。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供一种动车组长轴侧齿轮箱检修自动定位夹紧系统及方法,通过在双工位翻转机上设电气控制系统和与电气控制系统通信连接的长轴侧齿轮箱定位夹紧机构、拉杆游隙调整外侧工装、拉杆游隙调整内侧工装、盖板开合机构以及顶尖机构;长轴侧齿轮箱定位夹紧机构的支臂设计为自动升降伸缩,盖板开合机构设计为电动开合,避免了原来需要人工安装v型钢支架和人工掀盖地坑盖板的情况,自动化程度高;通过设计竖直升降滑座,并在滑座上设计了x和y两个方向的滑轨,确保了在合箱工位时,下箱体与大齿轮轴及左右两侧轴承座的无缝结合无干涉,通过下箱体主动去与笨重的齿轮轴结合的方式,方便了合箱作业步骤,避免了大尺寸及笨重工件的吊装,提高了合箱作业的安全性便捷性;通过设计特制锁紧手柄,在机器人拧紧作业前可以将工件滑座锁紧,并使其保持不动,从而避免了由于机器人在拧紧过程中产生的轴向力,使得工件沿着轴向移动,影响机器人自动化作业精度的问题,为系统机器人自动化拧紧螺栓的拧紧精度和拧紧质量提供了重要保障;通过设计拉杆游隙调整内/外侧工装,解决了德系弗兰德
crh380b(l)动车组齿轮箱不能靠齿轮箱自重来进行轴承游隙调整的问题,与原来的作业机构相比,齿轮箱箱体受力更加均匀,有效避免了原来的基体结构开裂问题,提高了零件的使用寿命;通过采用自动化的并具有数据读取和采集功能的仪表,并与系统作业软件和传感器相结合,实现了对作业步骤的自动跳转和卡控,省去了人工数据记录和靠人工经验及感觉作业的步骤,实现了作业过程的数字化。
5.为了实现上述目的,本发明提供一种动车组长轴侧齿轮箱检修自动定位夹紧系统,其特征在于:包括用于夹持固定齿轮箱工件双工位翻转机、电气控制系统以及与所述电气控制系统通信连接的长轴侧齿轮箱定位夹紧机构、拉杆游隙调整外侧工装、拉杆游隙调整内侧工装、盖板开合机构以及顶尖机构;
6.所述长轴侧齿轮箱定位夹紧机构包括安装于所述双工位翻转机上的夹具体背板、安装于所述夹具体背板上的水平横移机构、竖直升降滑座、齿轮箱支撑臂、安装于所述齿轮箱支撑臂上的齿轮箱竖直托举工装、安装于所述竖直升降滑座上的长轴侧齿轮箱下箱体定位夹紧工装以及竖直升降滑座锁紧手柄;通过所述竖直升降滑座确保在合箱工位时,齿轮箱下箱体与大齿轮轴及左右两侧轴承座的无缝结合;通过所述长轴侧齿轮箱下箱体定位夹紧工装确保齿轮箱前后方向和左右方向的精确定位;所述拉杆游隙调整外侧工装和所述拉杆游隙调整内侧工装均为一端与所述齿轮箱支撑臂固定,另一端横跨所述齿轮箱工件与所述竖直升降滑座固定的弓形结构,其横跨所述齿轮箱工件表面的部分均安装有调节脚杯,通过调节脚杯上调节螺杆的高度位置实现拉杆游隙调整外侧工装和拉杆游隙调整内侧工装与齿轮箱工件上表面定位;通过丝杠升降机和电机驱动所述盖板开合机构自动开合,通过轮辐式重力传感器使得所述顶尖机构的实时压力值显示在电气控制系统的电子屏幕上;通过所述电气控制系统控制所述顶尖机构动作,实现齿轮箱轴承游隙自动化调整。
7.进一步地,所述夹具体背板背面安装有齿轮传动机构,通过电机驱动完成所述长轴侧齿轮箱定位夹紧机构在竖直方向上
±
90
°
旋转动作;所述夹具体背板的正面安装有水平固定导轨和水平调节丝杠,二者均用于与所述水平横移机构连接;所述夹具体背板的正面安装有用于连接所述竖直升降滑座的竖直固定滑块和第一固定螺母、用于安装所述齿轮箱支撑臂的第一竖直固定导轨、竖直移动滑块和竖直滑动支座;所述竖直移动滑块安装于所述第一竖直固定导轨上。
8.进一步地,所述水平横移机构包括矩形中空框架,所述矩形中空框架的背面安装有与所述夹具体背板上的所述水平调节丝杠连接的第二固定螺母;所述水平调节丝杠的末端安装有可以使所述水平横移机构在所述夹具体背板上沿着水平方向左右滑动的第一手轮;所述矩形中空框架的背面安装有与所述水平固定导轨啮合连接的水平固定滑块;所述矩形中空框架的正面安装有可开合的短轴侧支臂,用于对齿轮箱工件短轴侧的车轴外圆进行定位夹紧;所述矩形中空框架的正面安装有可开合的长轴侧支臂,用于对齿轮箱工件长轴侧的车轴外圆进行定位和夹紧。
9.进一步地,所述竖直升降滑座设于所述短轴侧支臂和所述长轴侧支臂之间,所述竖直升降滑座包括与所述夹具体背板的正面相连的竖直端和垂直于设于所述竖直端底端的水平端;所述竖直端的背面安装有与所述夹具体背板相连的第二竖直固定导轨,可与所述夹具体背板上的所述竖直固定滑块连接并啮合,可使所述竖直升降滑座沿着竖直方向完成导向运动;所述竖直端的背面还安装有第一竖直丝杠,其与所述夹具体背板正面的第一
固定螺母连接,通过所述第一竖直丝杠转动可以带动所述竖直升降滑座在所述夹具体背板上沿着竖直面上下移动;所述水平端的底部设有与所述第一竖直丝杠相垂直的水平丝杠,所述水平丝杠的末端设有第二手轮,通过第二手轮驱动所述水平丝杠转动,使整个机构沿着夹具体背板的竖直方向上下移动;所述竖直端的正面靠下方位置设计有加强筋板;所述竖直升降滑座的水平端的上安装有水平滑轨,所述水平滑轨上面安装有齿轮箱固定滑座,所述长轴侧齿轮箱下箱体定位夹紧工装安装于所述齿轮箱固定滑座上;所述竖直升降滑座锁紧手柄为可调式定位锁紧手柄,安装于所述竖直升降滑座的水平端的下面靠近所述第二手轮的位置,用于对所述齿轮箱固定滑座的夹紧定位。
10.进一步地,所述齿轮箱支撑臂安装于所述竖直升降滑座和所述短轴侧支臂之间,所述齿轮箱支撑臂通过固定板及销轴与所述夹具体背板的上端连接,通过底部安装座与所述夹具体背板上的竖直滑动支座连接,通过电机驱动、联轴器和第二竖直丝杠完成对活动支臂的上下驱动,以完成支撑臂的开合动作;受力支臂在夹具体旋转成竖直姿态时,与活动支臂构成一个直角三角形,满足齿轮箱承重以及大齿轮游隙调整时的设备安装要求;
11.所述齿轮箱竖直托举工装整体为两半结构,使用时先安装下半个,滑进齿轮箱支撑臂的半圆内,然后再安装上半个,最后盖好活动盖板,并用插销锁紧机构锁紧。
12.进一步地,所述长轴侧齿轮箱下箱体定位夹紧工装包括安装于所述齿轮箱固定滑座上的底部支撑板、安装于所述底部支撑板上的齿轮箱支撑架、安装于所述齿轮箱支撑架上的齿轮箱仿形垫、侧面夹紧机构以及工件在位传感器。
13.进一步地,所述拉杆游隙调整外侧工装包括依次首尾相接的第一直杆、第一过度杆、圆弧避让杆、第二直杆;所述第一直杆的游离端部与所述齿轮箱支撑臂上靠近所述短轴侧支臂一侧的面固定,所述第二直杆的游离端部与所述竖直升降滑座远离所述短轴侧支臂的一侧固定;所述调节脚杯在所述圆弧避让杆的两侧分别安装;
14.所述拉杆游隙调整内侧工装包括依次首尾相接的第三直杆、第二过度杆、第四直杆;所述第三直杆与齿轮箱支撑臂靠近所述短轴侧支臂一侧的面固定,所述第四直杆的游离端部与所述竖直升降滑座远离所述短轴侧支臂的一侧固定。
15.进一步地,所述盖板开合机构安装在所述双工位翻转机底部转盘的盖板上,所述盖板通过连杆机构与沟槽组件背后的背板连接;所述顶尖机构整体安装在所述双工位翻转机的转盘下吊挂的沟槽组件内。
16.本发明的另一个方面提供一种动车组长轴侧齿轮箱检修定位夹紧方法,包括如下步骤:
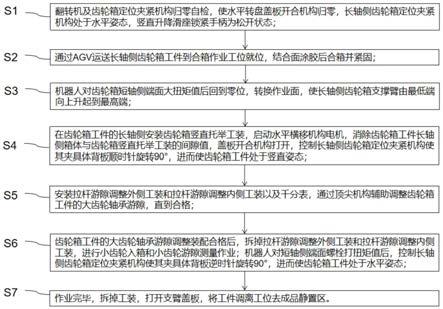
17.s1:翻转机及齿轮箱定位夹紧机构归零自检,通过电气控制系统控制双工位翻转机动作,使水平转盘盖板开合机构归零,长轴侧齿轮箱定位夹紧机构处于水平姿态,竖直升降滑座的底座更换为长轴侧齿轮箱工装,顶丝为退回状态,竖直升降滑座锁紧手柄为松开状态;
18.s2:通过agv运送长轴侧齿轮箱工件到合箱作业工位就位,结合面涂胶后合箱并紧固;
19.s3:将作业面转向机器人侧,机器人归零自检,对齿轮箱短轴侧端面螺栓打扭矩值后,回到零位;将作业面转向人工侧,使长轴侧齿轮箱支撑臂由最低端向上升起到最高端;
20.在齿轮箱工件的长轴侧安装齿轮箱竖直托举工装并固定,松开竖直升降座锁紧手
柄,启动水平横移机构电机,消除齿轮箱工件长轴侧箱体与齿轮箱竖直托举工装的间隙值,盖板开合机构打开,控制长轴侧齿轮箱定位夹紧机构使其夹具体背板顺时针旋转90
°
,使齿轮箱工件处于竖直姿态;
21.s5:将拉杆游隙调整外侧工装和拉杆游隙调整内侧工装就位并安装,用顶尖机构将齿轮箱工件顶起后,并用千分表测量间隙值,降下顶尖;根据计算间隙值选择游隙调整垫后更换齿轮箱短轴侧的调整垫;借助顶尖机构再次测量大齿轮游隙值,直到齿轮箱工件的大齿轮轴承游隙调整装配合格;
22.s6:齿轮箱工件的大齿轮轴承游隙调整装配合格后,拆掉拉杆游隙调整外侧工装和拉杆游隙调整内侧工装,安装齿轮箱轴短轴侧的轴承座盖,并密封,并进行小齿轮入箱和小齿轮游隙测量作业;将作业面转到机器人侧,机器人对短轴侧端面螺栓打扭矩值后,自动回到零位;将作业面转到人工侧,通过电气控制系统控制长轴侧齿轮箱定位夹紧机构使其夹具体背板逆时针旋转90
°
,使得齿轮箱工件处于水平姿态;
23.s7:作业完毕,拆掉工装,打开支臂盖板,将工件调离工位去成品静置区。
24.进一步地,步骤s5还包括如下步骤:
25.s51:在齿轮箱工件的短轴侧的车轴外圆上面对面安装两套千分表,表座吸在车轴外圆上,表针接触齿轮箱长轴侧的轴承座端面,工人转动齿轮箱工件,读取两个表的读数,并取平均值,并自动传送至服务器;
26.s52:电气控制系统发出指令,控制顶尖机构动作,使得顶尖接触齿轮箱工件的下端中心孔,将工件顶起,同时使拉杆游隙调整外侧工装和拉杆游隙调整内侧工装受力;查看顶尖传感器读数在940
±
20kg范围内时,顶尖停止顶升动作;作业人员再次转动千分表,读取两个表的读数,取平均值,并将该读数上传至服务器;
27.s53:电气控制系统软件根据提前设定好的计算公式,将两组数值进行计算,并得出齿轮箱轴承的间隙值,并将该数值显示在所述电气控制系统的电子屏幕上;作业人员根据所述间隙值制作相对应的游隙调整垫;运输长轴侧齿轮箱游隙调整垫到合箱工位,工人取下工件上的仪表,打开长轴侧的齿轮箱轴承座盖和轴承座,将原来的垫取出;将制作好的游隙调整垫从短轴侧套入车轴,然后装好轴承座,并与紧固螺栓固定;
28.s54:作业人员重新安装千分表,再次测量齿轮箱轴轴承和箱体轴承座的间隙值,确定该数值在合格范围内后上传至服务器(如果检测结果不合格,则可能是计算和前面测量有误,继续前面的步骤,直到数据合格);
29.s55:转动车轴,作业人员利用测阻仪检测轴承的转动的灵活度和阻力值,确保该数值在合格范围内,并上传至服务器进行系统自动合格判定
30.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
31.(1)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,为双工位翻转机的一部分,通过设计自动升降伸缩支臂和电动开合机构,避免了原来需要人工安装v型钢支架和人工掀盖地坑盖板的情况,自动化程度高;提高了工作效率,降低了劳动强度。
32.(2)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,通过设计竖直升降滑座,并在滑座上设计了x和y两个方向的滑轨,确保了在合箱工位时,下箱体与大齿轮轴及左右两侧轴承座的无缝结合无干涉,通过下箱体主动去与笨重的齿轮轴结合的方式,方
便了合箱作业步骤,避免了大尺寸及笨重工件的吊装,提高了合箱作业的安全性便捷性;
33.(3)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,通过设计齿轮箱仿形工装,确保了齿轮箱前后方向和左右方向的精确定位,为满足机器人作业视觉相机的识别范围,保证系统正常作业提供了保证;
34.(4)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,通过设计特制锁紧手柄,在机器人拧紧作业前可以将工件滑座锁紧,并使其保持不动,从而避免了由于机器人在拧紧过程中产生的轴向力,使得工件沿着轴向移动,影响机器人自动化作业精度的问题,为系统机器人自动化拧紧螺栓的拧紧精度和拧紧质量提供了重要保障;
35.(5)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,通过设计拉杆游隙调整内/外侧工装,解决了德系弗兰德crh380b(l)动车组齿轮箱不能靠齿轮箱自重来进行轴承游隙调整的问题,与原来的作业机构相比,齿轮箱箱体受力更加均匀,有效避免了原来的基体结构开裂问题,提高了零件的使用寿命;
36.(6)本发明的一种动车组长轴侧齿轮箱检修自动定位夹紧系统,通过采用自动化的并具有数据读取和采集功能的仪表,并与系统作业软件和传感器相结合,实现了对作业步骤的自动跳转和卡控,省去了人工数据记录和靠人工经验及感觉作业的步骤,实现了作业过程的数字化。
附图说明
37.图1为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统在翻转机上的位置示意图(视角一);
38.图2为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统在翻转机上的位置示意图(视角二);
39.图3为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的长轴侧齿轮箱定位夹紧机构的结构示意图(视角三);
40.图4为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的长轴侧齿轮箱定位夹紧机构的结构示意图(视角四);
41.图5为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的长轴侧齿轮箱定位夹紧机构的俯视结构示意图;
42.图6为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的长轴侧齿轮箱定位夹紧机构的侧视结构示意图;
43.图7为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的夹具体背板的背面结构示意图;
44.图8为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的夹具体背板的正面结构示意图;
45.图9为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的水平横移机构背面结构示意图;
46.图10为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的水平横移机构正面结构示意图;
47.图11为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧系统的长轴侧
齿轮箱下箱体定位夹紧工装的整体结构示意图;
48.图12为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧方法的作业流程示意图;
49.图13为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧方法的大齿轮轴承游隙调整流程示意图;
50.图14为本发明实施例一种动车组长轴侧齿轮箱检修自动定位夹紧方法的整个作业过程示意图。
51.在所有附图中,同样的附图标记表示相同的技术特征,具体为:1-双工位翻转机、11-转盘、2-电气控制系统、3-齿轮箱工件、4-顶尖机构、5-长轴侧齿轮箱定位夹紧机构、51-夹具体背板、511-齿轮传动机构、512-水平固定导轨、513-水平调节丝杠、5131-第一手轮、514-竖直固定滑块、515-第一竖直固定导轨、516-第一固定螺母、517-竖直移动滑块、518-竖直滑动支座、52-水平横移机构、521-矩形中空框架、522-第二固定螺母、523-水平固定滑块、524-短轴侧支臂、525-长轴侧支臂、53-竖直升降滑座、531-竖直端、5311-第一竖直丝杠、532-水平端、5321-水平丝杠、5322-第二手轮、533-加强筋板、534-水平滑轨、535-齿轮箱固定滑座、54-齿轮箱支撑臂、55-齿轮箱竖直托举工装、56-长轴侧齿轮箱下箱体定位夹紧工装、561-底部支撑板、562-齿轮箱支撑架、563-齿轮箱仿形垫、564-夹紧机构、565-工件在位传感器、57-竖直升降滑座锁紧手柄、6-拉杆游隙调整外侧工装、7-拉杆游隙调整内侧工装、8盖板开合机构。
具体实施方式
52.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
53.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,当元件被称为“固定于”、“设置于”或“设于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上;术语“安装”、“相连”、“连接”、“设有”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。此外,术语“第一”、“第二”......仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”......的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。在本发明的描述中,需要理解的是,术语“中心”、“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
54.如图1-图11所示,本发明提供一种动车组长轴侧齿轮箱检修自动定位夹紧系统,用于高铁及车辆动车轮对分体式齿轮箱检修领域,来源于动车组长轴侧齿轮箱上下箱体合箱及轴承座游隙调整作业,针对德系弗兰德齿轮箱设计,不能适用于短轴侧戚野堰主机厂的齿轮箱作业需要,其包括用于夹持固定齿轮箱工件3双工位翻转机1、电气控制系统2以及与所述电气控制系统2通信连接的长轴侧齿轮箱定位夹紧机构5、拉杆游隙调整外侧工装6、拉杆游隙调整内侧工装7、盖板开合机构8以及顶尖机构4;所述长轴侧齿轮箱定位夹紧机构5包括安装于所述双工位翻转机1上的夹具体背板51、安装于所述夹具体背板51上的水平横移机构52、竖直升降滑座53、齿轮箱支撑臂54、安装于所述齿轮箱支撑臂54上的齿轮箱竖直托举工装55、安装于所述竖直升降滑座53上的长轴侧齿轮箱下箱体定位夹紧工装56以及竖直升降滑座锁紧手柄57;本发明通过所述竖直升降滑座53确保在合箱工位时,齿轮箱下箱体与大齿轮轴及左右两侧轴承座的无缝结合;所述长轴侧齿轮箱下箱体定位夹紧工装56为仿形工装,用以确保齿轮箱前后方向和左右方向的精确定位;所述拉杆游隙调整外侧工装6和所述拉杆游隙调整内侧工装7整体均呈弓形,其均为一端与所述齿轮箱支撑臂54固定,另一端横跨所述齿轮箱工件3与所述竖直升降滑座53固定的结构,其横跨所述齿轮箱工件3表面的部分均安装有调节脚杯,通过调节脚杯上调节螺杆的高度位置将所述拉杆游隙调整外侧工装6和所述拉杆游隙调整内侧工装7与齿轮箱工件3上表面定位;通过丝杠升降机和电机驱动所述盖板开合机构8自动开合,通过在所述顶尖机构4上设置轮辐式重力传感器使得压力值显示在电气控制系统的电子屏幕上,以提示作业人员实时的压力值;通过所述电气控制系统2控制所述顶尖机构4动作,实现齿轮箱轴承游隙自动化调整。
55.进一步地,如图1和图2所示,所述双工位翻转机1底部设有转盘11,能够进行水平方向
±
180
°
的旋转,便于所述双工位翻转机1的人工作业面和机器人作业面的便捷转换;所述转盘11上方中间设有一个龙门箱式结构,所述龙门箱式结构两边安装有两个驱动的转轴,每个转轴安装一套所述长轴侧齿轮箱定位夹紧机构5,每个所述长轴侧齿轮箱定位夹紧机构5上均安装有齿轮箱支撑臂54和齿轮箱竖直托举工装55,所述齿轮箱支撑臂54和所述齿轮箱竖直托举工装55均可以完成开合伸缩动作,所述齿轮箱支撑臂54和所述齿轮箱竖直托举工装55上均安装有盖板,可用于齿轮箱工件3的固定,可满足不同种类齿轮箱的检修作业;由于龙门箱式结构两侧的所述长轴侧齿轮箱定位夹紧机构5可以通过底部所述转盘11进行作业工位的自由切换,因此其可以同时满足双工位的作业要求。
56.进一步地,如图1和图2所示,所述电气控制系统2包括电控柜、中央计算机、电气显示屏和设备操作按钮,其将顶尖传感器信号、电机的plc信号汇集到一起,并通过中央计算机进行信号处理,来控制翻转机所有机构动作电机的驱动器和传感器动作;配有微型中央计算机,用于各个机构动作的信号收集,指令收发、动作下达,机构互锁和动作执行控制等;所述电气控制系统2安装于所述龙门箱式结构上方,所述电气控制系统2通过紧固螺钉和电源线及信号线与双工位翻转机上的龙门箱式结构相连接;
57.进一步地,如图1和图2所示,所述顶尖机构4整体通过紧固螺钉和信号线连接在所述双工位翻转机1的水平转盘下吊挂的沟槽组件内,其整体为一圆锥柱状结构,下方安装有轮辐式重力传感器,上面为一特制的水平外向浮动结构,整个结构通过丝杠升降装置进行上下升降,当齿轮箱工件3旋转竖直姿态后,顶尖上升可以向上接触顶到齿轮箱工件,进而使齿轮箱与支撑座脱离,同时轮辐式重力传感器的压力值会显示在电气控制系统的电子屏
幕上,用来提示作业人员实时的压力值。通过采用自动化的并具有数据读取和采集功能的仪表,并与系统作业软件和传感器相结合,实现了对作业步骤的自动跳转和卡控,省去了人工数据记录和靠人工经验及感觉作业的步骤,实现了作业过程的数字化。
58.进一步地,如图1和图2所示,所述盖板开合机构8与翻转机底盘沟槽组件配合使用,安装在所述双工位翻转机1底部转盘的盖板上,通过盖板的开合动作来避让齿轮箱工件3的长轴端,盖板通过转轴及荷叶与沟槽边缘连接,通过连杆机构与沟槽组件背后的背板连接,通过丝杠升降机和电机驱动,通过位置传感器定位来使得连杆做往复动作,进而实现盖板的开合动作;本发明通过设计自动升降伸缩支臂和电动开合机构,避免了原来需要人工安装v型钢支架和人工掀盖地坑盖板的情况,自动化程度高;提高了工作效率,降低了劳动强度。
59.进一步地,如图1和图2所示,所述拉杆游隙调整外侧工装6整体呈弓形,由q345钢材焊接而成,通过下端平面的插销与翻转机支臂外圆底面的圆弧面固定,通过上端双插销机构与零件上端的翻转机升降支座固定,中间是一个让开的圆弧结构,用于在作业过程中让开齿轮箱端盖的开合操作,圆弧机构两侧各有两个调节脚杯,通过调节螺杆的高度位置将拉杆与齿轮箱工件上表面定位,进而进行齿轮箱大轴承游隙调整作业。所述拉杆游隙调整内侧工装7整体呈弓形,由q345钢材焊接而成,通过下端平面的插销与翻转机支臂下方插销位和斜拉加强筋下端面固定,通过上端双插销机构与零件上端的翻转机升降支座固定,中间是一个直杆结构,与拉杆游隙调整外侧工装6相比,没有圆弧避让结构,直杆机构两侧各有两个调节脚杯,通过调节螺杆的高度位置将拉杆与齿轮箱工件上表面定位,进行进行齿轮箱大轴承游隙调整作业;本发明放入所述拉杆游隙调整外侧工装6通过插销机构上端与夹具体竖直升降滑座固定,通过调节脚杯与齿轮箱工件定位,下端通过插销机构和定位面与翻转机支臂开合机构外圆底部圆环端面固定;所述拉杆游隙调整内侧工装7上端通过插销机构与夹具体竖直升降滑座端面孔固定,通过调节脚杯与齿轮箱工件定位,下端通过插销机构和定位面与翻转机开合支臂下方插销位和斜拉加强筋下端面固定;本发明通过设计拉杆游隙调整内侧工装和拉杆游隙调整外侧工装,解决了德系弗兰德crh380b(l)动车组齿轮箱不能靠齿轮箱自重来进行轴承游隙调整的问题,与原来的作业机构相比,齿轮箱箱体受力更加均匀,有效避免了原来的基体结构开裂问题,提高了零件的使用寿命。
60.进一步地,如图1-图11所示,所述长轴侧齿轮箱定位夹紧机构5包括传感器组件、安装于所述双工位翻转机1上的夹具体背板51和安装于所述夹具体背板51上的夹具体组件,所述夹具体组件包括安装于所述夹具体背板51上的水平横移机构52、竖直升降滑座53、齿轮箱支撑臂54、安装于所述齿轮箱支撑臂54上的齿轮箱竖直托举工装55、安装于所述竖直升降滑座53上的长轴侧齿轮箱下箱体定位夹紧工装56以及竖直升降滑座锁紧手柄57;所述夹具体背板51的主体结构由q235焊接而成,所述夹具体背板51背面(朝向所述电气控制系统2的一侧)安装有齿轮传动机构511,其中大齿轮用来和双工位翻转机转盘上方的箱式框架连接固定,小齿轮用来连接驱动电机,通过电机驱动完成所述夹具体组件在竖直方向上
±
90
°
旋转动作;所述夹具体背板51的正面(远离所述电气控制系统2的一侧)沿所述夹具体背板51的纵向中心轴线方向安装有水平固定导轨512和水平调节丝杠513,二者均用于与所述水平横移机构52连接;所述夹具体背板51的正面安装有用于连接所述竖直升降滑座53的竖直固定滑块514和u型tr型第一固定螺母516、用于安装所述齿轮箱支撑臂54的第一竖
直固定导轨515、竖直移动滑块517和竖直滑动支座518,所述竖直移动滑块517安装于所述第一竖直固定导轨515上;所述长轴侧齿轮箱定位夹紧机构5通过夹具体背板51上的大齿轮安装板与双工位翻转机上的安装孔相连接,并通过紧固螺钉固定。所述传感器组件包括设于所述竖直升降滑座53上的竖直滑座工件检测传感器、设于所述水平横移机构52上的水平横移机构位置检测传感器。本发明提高了工作效率,降低了劳动强度。该机构为双工位翻转机的一部分,通过设计自动升降伸缩支臂和电动开合机构,避免了原来需要人工安装v型钢支架和人工掀盖地坑盖板的情况,自动化程度高;
61.进一步地,如图2-4和8-10所示,所述水平横移机构52包括矩形中空框架521,所述矩形中空框架521由q345钢材焊接而成;所述矩形中空框架521的背面(靠近所述夹具体背板51的一面)安装有tr型第二固定螺母522,与所述夹具体背板51上的所述水平调节丝杠513连接,所述水平调节丝杠513上安装有第一手轮5131,通过第一手轮的转动驱动所述水平横移机构52水平方向移动;所述矩形中空框架521的背面安装有水平固定滑块523,与所述夹具体背板51上的所述水平固定导轨512啮合连接,可以沿所述水平固定导轨512滑动;所述矩形中空框架521的正面左侧安装有短轴侧支臂524,其可以完成开合和对齿轮箱短轴侧工件的齿轮箱外圆进行定位和夹紧作业;所述矩形中空框架521的正面右侧安装有长轴侧支臂525,其可以完成开合动作以及对齿轮箱工件的长轴侧车轴外圆进行定位和夹紧作业;所述短轴侧支臂524和所述长轴侧支臂525的动力都是驱动电机通过联轴节和丝杠传动;所述长轴侧支臂525与所述第二固定螺母522安装于所述矩形中空框架521上相对的两个面的同一侧;本发明的所述水平横移机构52通过水平固定滑块523与夹具体背板51上的水平固定导轨512相连接,通过第二固定螺母522与夹具体背板51上的水平调节丝杠513连接,所述水平调节丝杠513的末端安装有第一手轮5131,通过调节第一手轮5131旋转可以使得所述水平横移机构52在所述夹具体背板51上沿着水平方向左右滑动。
62.进一步地,如图1-图11所示,所述竖直升降滑座53整体呈l型,由q345钢材焊接而成,设于所述短轴侧支臂524和所述长轴侧支臂525之间,所述竖直升降滑座53包括与所述夹具体背板51的正面相连的竖直端531和垂直于设于所述竖直端531底端的水平端532;所述竖直端531的背面安装有与所述夹具体背板51相连的第二竖直固定导轨,可与所述夹具体背板51上的所述竖直固定滑块514连接并啮合,可使所述竖直升降滑座53沿着竖直方向完成导向运动;所述竖直端531的背面还安装有第一竖直丝杠5311,所述第一竖直丝杠5311为tr型丝杠,该丝杠与所述夹具体背板51正面的第一固定螺母516连接,通过所述第一竖直丝杠5311转动可以带动所述竖直升降滑座53在所述夹具体背板51上沿着竖直面上下移动;所述水平端532的底部设有与所述第一竖直丝杠5311相垂直的水平丝杠5321,所述第一竖直丝杠5311通过一个直角转接头(1:5的减速比)与所述水平丝杠5321相连接,所述水平丝杠5321的末端设有第二手轮5322,通过水平丝杠末端的第二手轮5322驱动所述水平丝杠5321转动,可以使整个机构沿着夹具体背板51的竖直方向上下移动;所述竖直端531的正面靠下方位子设计有加强筋板533,用于整个机构的加强;所述竖直升降滑座53的水平端532的上面平行间隔安装有ox和oy两个方向的水平滑轨534,所述水平滑轨534上面安装有齿轮箱固定滑座535,所述长轴侧齿轮箱下箱体定位夹紧工装56安装于所述齿轮箱固定滑座535上;本发明的所述竖直升降滑座53通过竖直端背部的第二竖直固定导轨与夹具体背板51上的竖直固定滑块514啮合连接,通过第一竖直丝杠5311与夹具体背板51上的第一固定螺母
旋和连接,通过其底部的直角转头将第一竖直丝杠5311和水平丝杠5321相连接,通过安装在水平丝杠5321末端的第二手轮5322调节和旋转,可以使得竖直升降滑座53在夹具体背板51上沿着竖直方向上下移动;本发明通过设计竖直升降滑座,并在滑座上设计了x和y两个方向的滑轨,确保了在合箱工位时,下箱体与大齿轮轴及左右两侧轴承座的无缝结合无干涉,通过下箱体主动去与笨重的齿轮轴结合的方式,方便了合箱作业步骤,避免了大尺寸及笨重工件的吊装,提高了合箱作业的安全性便捷性。
63.进一步地,如图1-图11所示,所述竖直升降滑座锁紧手柄57与所述竖直升降滑座53通过螺纹孔穿过连接,安装于所述竖直升降滑座53的水平端532的下面靠近所述第二手轮5322的位置,用于对所述齿轮箱固定滑座535的夹紧定位作业,为机器人拧紧提供方便;所述竖直升降滑座锁紧手柄57为可调式定位锁紧手柄,由特制螺杆和尼龙顶尖头组合而成,通过设计特制锁紧手柄,在机器人拧紧作业前可以将工件滑座锁紧,并使其保持不动,从而避免了由于机器人在拧紧过程中产生的轴向力,使得工件沿着轴向移动,影响机器人自动化作业精度的问题,为系统机器人自动化拧紧螺栓的拧紧精度和拧紧质量提供了重要保障。
64.进一步地,如图1-图11所示,所述齿轮箱支撑臂54安装于所述竖直升降滑座53和所述短轴侧支臂524之间,包括受力支臂、活动支臂、活动盖板、插销锁紧机构、固定板及销轴、第二竖直丝杠及联轴器、驱动电机及减速机、位置传感器和底部安装座;通过固定板及销轴与所述夹具体背板51的上端连接,通过底部安装座与所述夹具体背板51上的竖直滑动支座518连接,通过电机驱动、万向联轴器和第二竖直丝杠完成对活动支臂的上下驱动,完成开合动作;所述受力支臂为特殊设计结构,在夹具体旋转成竖直姿态时,与活动支臂构成一个直角三角形,满足齿轮箱承重以及大齿轮游隙调整时的设备安装要求;所述齿轮箱支撑臂54位于所述竖直升降滑座53的右边,长轴侧齿轮箱工件作业时,除了通过齿轮箱支撑臂54和l形竖直升降滑座53共同作用外,由齿轮箱工件需要向右顺时针旋转90
°
,为了和翻转机的底盘避让,还需要使用翻转机的底部水平转盘的盖板开合机构,需要与夹具体背板的旋转联动控制。
65.进一步地,所述齿轮箱竖直托举工装55整体由尼龙或pp车削而成,为了便于安装,将其分成两半结构;使用时先安装下半个,滑进齿轮箱支撑臂的半圆内,然后再安装上半个,最后盖好活动盖板,并用插销锁紧机构锁紧。
66.进一步地,如图1-图11所示,所述长轴侧齿轮箱下箱体定位夹紧工装56是根据长轴侧德系crh380b(l)齿轮箱工件仿形定制而成,用于齿轮箱工件的前后定位和左右夹紧作业,其包括安装于所述齿轮箱固定滑座535上的底部支撑板561、安装于所述底部支撑板561上的齿轮箱支撑架562、安装于所述齿轮箱支撑架562上的齿轮箱仿形垫563、侧面夹紧机构564以及工件在位传感器565;所述长轴侧齿轮箱下箱体定位夹紧工装56与底部的所述竖直升降滑座53通过紧固螺钉和防松垫圈连接;本发明通过设计齿轮箱仿形工装,确保了齿轮箱前后方向和左右方向的精确定位,为满足机器人作业视觉相机的识别范围,保证系统正常作业提供了保证。
67.如图12-14所示,按照本发明的另一个方面,还提供了一种动车组长轴侧齿轮箱检修自动定位夹紧系统的工作流程如下:
68.s1:翻转机及齿轮箱定位夹紧机构归零自检;通过电气控制系统控制双工位翻转
机动作,使水平转盘盖板开合机构归零,长轴侧齿轮箱定位夹紧机构处于水平姿态,竖直升降滑座的底座更换为长轴侧齿轮箱工装,顶丝为退回状态,竖直升降滑座锁紧手柄为松开状态;具体地,通过电气控制系统控制双工位翻转机动作,使水平转盘盖板开合机构归零,顶部顶尖机构归零,水平转盘伺服电机归零,a面和b面长轴侧齿轮箱定位夹紧机构的竖直转轴伺服电机归零,竖直旋转开关关闭;即长轴侧齿轮箱定位夹紧机构处于水平姿态,竖直转轴锁紧,长轴侧齿轮箱定位夹紧机构的竖直滑座工件检测传感器显示无工件;长轴侧齿轮箱定位夹紧机构状态自检,通过电气控制系统使水平横移机构处于夹具体背板的中间位置,使长轴侧齿轮箱支臂处于最低位置,水平横移机构的短轴侧支臂处于最高位,水平横移机构的长轴侧支臂处于最高位,所有支臂盖板均为打开状态;竖直升降滑座在竖直方向的行程处于最低位置,竖直升降滑座ox方向滑座滑块处于中间位置,竖直升降滑座的底座更换为长轴侧齿轮箱工装,顶丝为退回状态,竖直升降滑座锁紧手柄为松开状态;
69.s2:通过agv运送长轴侧齿轮箱工件到合箱作业工位就位,结合面涂胶后合箱并紧固;具体包括如下步骤:
70.s21:作业人员吊装齿轮箱下箱体到齿轮箱下箱体定位夹紧工装,并用左右锁紧顶丝夹紧齿轮箱下箱体的侧面,此时工件在位传感器检测到竖直安装座上有工件放入;
71.s22:作业人员通过agv运送长轴侧齿轮轴到达合箱作业工位,并吊装长轴侧齿轮轴到水平横移机构上(短轴侧的齿轮箱的轴承座和长轴侧的齿轮箱的轴承座密封环自己轴承座盖),通过水平横移机构的短轴侧支臂上的定位机构定位,确保工件轴向位置准确,盖好水平横移机构两端支臂上的盖板,并用弹簧插销固定;
72.s23:agv运送长轴侧齿轮箱下箱体送到合箱工位,在下箱体结合面以及左右轴承座与齿轮箱箱体侧面的结合面涂抹密封胶;合箱,组合安装齿轮箱下箱体和左右轴承座,根据工艺要求带紧紧固螺栓;
73.s24:agv运送短轴侧齿轮箱上箱体到合箱工位,并吊装上箱体与下箱体及左右两侧轴承座合装;安装齿轮箱上下合箱面螺栓和防松垫圈,并用扭矩扳手预紧后打扭矩值;在长轴侧齿轮箱轴承座结合面涂胶,确保厚度均匀斌覆盖与轴承座盖结合面的环形面;安装长轴侧齿轮箱的密封环和轴承座盖,安装轴承座盖螺丝,并用扭矩扳手打扭矩值,并做好防松标记;使竖直升降座锁紧手柄处于锁紧状态;fld齿轮箱直接在齿轮箱轴承座结合面涂抹密封胶后,安装并预紧短轴侧轴承座螺栓;
74.s3:将作业面转向机器人侧,机器人归零自检,对齿轮箱短轴侧面打扭矩值后,回到零位;将作业面转向人工侧,使长轴侧齿轮箱支撑臂由最低端向上升起到最高端;具体地,电气控制系统发出指令,使水平转盘旋转180
°
到机器人侧;机器人归零自检,伺服拧紧轴自动校验并数据校核,机器人所有旋转轴动作及信号自检;拧紧轴配置安装长轴侧齿轮箱拧紧工装,机器人及拧紧系统配置长轴侧齿轮箱拧紧程序;机器人对齿轮箱长轴侧面打扭矩值后,机器人回零位;电气控制系统发出指令,水平转盘反方向旋转180
°
到人工侧;长轴侧齿轮箱支撑臂由最低端向上升起到最高端;
75.s4:在齿轮箱工件的长轴侧安装齿轮箱竖直托举工装并固定,松开竖直升降座锁紧手柄,启动水平横移机构电机,消除齿轮箱工件长轴侧箱体与齿轮箱竖直托举工装的间隙值,控制长轴侧齿轮箱定位夹紧机构使其夹具体背板顺时针旋转90
°
,使齿轮箱工件处于竖直姿态;具体地,长轴侧工装就位,在齿轮箱工件的长轴侧安装齿轮箱竖直托举工装,盖
好支臂盖板,并通过弹簧插销固定牢固;将竖直升降滑座的底座锁紧手柄松开;通过电气控制系统启动水平横移机构电机,消除齿轮箱工件长轴侧箱体与所述齿轮箱竖直托举工装的间隙值;电气控制系统转动检测,控制长轴侧齿轮箱定位夹紧机构上竖直旋转开关为打开,允许设备执行竖直旋转动作;盖板开合机构打开;控制夹具体背板向右顺时针旋转90
°
,使齿轮箱工件处于竖直姿态;
76.s5:将拉杆游隙调整外侧工装和拉杆游隙调整内侧工装就位并安装,用顶尖机构将齿轮箱工件顶起后,并用千分表测量间隙值,降下顶尖;根据计算间隙值选择游隙调整垫后更换齿轮箱短轴侧的调整垫;借助顶尖机构再次测量大齿轮游隙值,直到齿轮箱工件的大齿轮轴承游隙调整装配合格;具体地,还包括如下步骤:
77.s51:在齿轮箱工件的短轴侧的车轴外圆上面对面安装两套千分表,表座吸在车轴外圆上,表针接触齿轮箱长轴侧的轴承座端面,工人转动齿轮箱工件,读取两个表的读数,并取平均值,并将该数据自动传送至服务器;
78.s52:电气控制系统发出指令,控制顶尖机构动作,使得顶尖接触齿轮箱工件的下端中心孔,将工件顶起,同时使拉杆游隙调整外侧工装和拉杆游隙调整内侧工装受力;查看顶尖传感器读数在940
±
20kg范围内时,顶尖停止顶升动作;作业人员再次转动千分表,读取两个表的读数,取平均值,并将该读数上传至服务器;
79.s53:电气控制系统软件根据提前设定好的计算公式,将两组数值进行计算,并得出齿轮箱轴承的间隙值,并将该数值显示在所述电气控制系统的电子屏幕上;作业人员根据所述间隙值制作相对应的游隙调整垫;运输长轴侧齿轮箱游隙调整垫到合箱工位,工人取下工件上的仪表,打开长轴侧的齿轮箱轴承座盖和轴承座,将原来的垫取出;将制作好的游隙调整垫从短轴侧套入车轴,然后装好轴承座,并与紧固螺栓固定;
80.s54:作业人员重新安装千分表,再次测量齿轮箱轴轴承和箱体轴承座的间隙值,确定该数值在合格范围内后上传至服务器(如果检测结果不合格,则可能是计算和前面测量有误,继续前面的步骤,直到数据合格);
81.s55:转动车轴,作业人员利用测阻仪检测轴承的转动的灵活度和阻力值,确保该数值在合格范围内,并上传至服务器进行系统自动合格判定;
82.s6:齿轮箱工件的大齿轮轴承游隙调整装配合格后,拆掉拉杆游隙调整外侧工装和拉杆游隙调整内侧工装,安装齿轮箱轴短轴侧的轴承座盖,并密封,并进行小齿轮入箱和小齿轮游隙测量作业,通过电气控制系统控制长轴侧齿轮箱定位夹紧机构使其夹具体背板顺时针旋转90
°
,使得齿轮箱工件处于水平姿态;具体地,齿轮箱工件的大齿轮轴承游隙调整装配合格后,拆掉拉杆游隙调整外侧工装和拉杆游隙调整内侧工装,安装齿轮箱轴短轴侧的轴承座盖,安装密封环、挡水环等其它零件;小齿轮箱入箱,安装小齿轮,并将螺栓预紧;电气控制系统发出指令,控制翻转机水平转盘旋转180
°
到机器人侧,机器人对齿轮箱工件长轴侧螺栓和小齿轮上下面的螺栓进行拧紧,并打扭矩值;机器人回到零位;控制翻转机水平转盘反方向旋转180
°
到人工侧;控制夹具体背板向左逆时针旋转90
°
,使得齿轮箱工件处于水平姿态;
83.s7:作业完毕,拆掉工装,打开支臂盖板,将工件调离工位去成品静置区。
84.本发明提供的一种动车组长轴侧齿轮箱检修自动定位夹紧系统和方法的工作原理:本发明为双工位翻转机的一部分,通过设计自动升降伸缩支臂和电动开合机构,避免了
原来需要人工安装v型钢支架和人工掀盖地坑盖板的情况,自动化程度高;提高了工作效率,降低了劳动强度;通过设计竖直升降滑座,并在滑座上设计了x和y两个方向的滑轨,确保了在合箱工位时,下箱体与大齿轮轴及左右两侧轴承座的无缝结合无干涉,通过下箱体主动去与笨重的齿轮轴结合的方式,方便了合箱作业步骤,避免了大尺寸及笨重工件的吊装,提高了合箱作业的安全性便捷性;通过设计齿轮箱仿形工装,确保了齿轮箱前后方向和左右方向的精确定位,为满足机器人作业视觉相机的识别范围,保证系统正常作业提供了保证;通过设计特制锁紧手柄,在机器人拧紧作业前可以将工件滑座锁紧,并使其保持不动,从而避免了由于机器人在拧紧过程中产生的轴向力,使得工件沿着轴向移动,影响机器人自动化作业精度的问题,为系统机器人自动化拧紧螺栓的拧紧精度和拧紧质量提供了重要保障;通过设计拉杆游隙调整内/外侧工装,解决了德系弗兰德crh380b(l)动车组齿轮箱不能靠齿轮箱自重来进行轴承游隙调整的问题,与原来的作业机构相比,齿轮箱箱体受力更加均匀,有效避免了原来的基体结构开裂问题,提高了零件的使用寿命;通过采用自动化的并具有数据读取和采集功能的仪表,并与系统作业软件和传感器相结合,实现了对作业步骤的自动跳转和卡控,省去了人工数据记录和靠人工经验及感觉作业的步骤,实现了作业过程的数字化。
85.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1