一种基于二进制拓扑和边缘算法的单轨吊离线调度系统的制作方法
1.本发明涉及煤矿井下单轨吊车及其它相似轨道车辆的调度领域。
背景技术:
2.现有技术中煤矿井下单轨吊车调度一般有两种方案。
3.第一种以车载视频为依据的远程控制方案,本方案需要在井下布置千兆或万兆级工业环网,并在车辆行驶区域保证无线网络的稳定覆盖。在单轨吊两车头安装至少各一个摄像头(作为远程控制依据);车身处加装cpe(或其他无线通讯设备)与车辆主控制器通讯连接。主控器开放数据上传通讯,并开放控制授权。就可以在井上或井下的集中控制平台对单轨吊车进行远程控制。硬件较为简便,多用于车辆的智能化改造项目。
4.第二种依托服务器的在线集中调度系统方案,本方案需要煤矿建立井上调度服务器定位服务器等。首先用上位机软件做出相关页面,绘制井下巷道地图(或结合gis地理信息系统)确定固定设备位置,依靠定位服务器及相关定位方法确定车辆位置。井上人机界面的井下巷道、车辆位置状态等作为基础依据,在调度服务器写出各种逻辑程序。再由井上集中控制平台以统一控制或者手动干预的形式实现单轨吊的无人化调度功能。本方案的车辆控制部分仍然依靠无线网络。在车辆控制方面的逻辑与第一种方案类似。
5.两种方案的车辆控制都必须依靠路径无线网络的全面而稳定的覆盖。而实际中,在井下的各种设备状态是难于保证的,如果存在无线网络质量低的问题,则:第一种方案中视频信号的延迟、卡顿甚至掉线,会直接导致远程控制车辆的依据失效,存在安全隐患。两种方案对车辆的控制均依靠无线通讯,于是为了保证单轨吊接收无线控制信号的正确性,就需要对无线通讯信号进行实时心跳监测——即必须将从车辆控制器到远程控制平台之间的所有关设备的心跳写在无线通讯协议之中。在此基础上:如果所有心跳都正常(低容错),则证明无线通讯正常,车辆控制器可以接收和执行无线控制信号;一旦发现任何设备的心跳异常,则说明通讯不稳定,以安全为前提,逻辑上必须中断接收远程控制信号,并直接停车。这就导致两种方案的车辆控制部分即使在无线网络全覆盖的前提下,依然存在难以避免的不稳定性。
技术实现要素:
6.本发明所要解决的技术问题是:如何解决煤矿井下单轨吊车无人化调度的不稳定性。
7.本发明所采用的技术方案是:一种基于二进制拓扑和边缘算法的单轨吊离线调度系统,每辆单轨吊车都安装有车载可编程控制器,车载专用车载可编程控制器具有人机界面和输入键盘;每个道岔都安装具有逻辑编程功能的道岔控制器,用来控制当前道岔的换岔和锁定,每个道岔控制器都内置一个小型基站ap,每辆单轨吊车的车载控制器都内置与小型基站ap配合联通的sta装置,在每辆单轨吊车运行到一个道岔附近时,单轨吊车与该道岔的小型基站ap建立无线连接,按如下步骤进行单轨吊离线调度:
步骤一、根据巷道的道岔分布(可以在巷道图上查到),对道岔进行二进制编码并输入到对应的道岔控制器中,将巷道入口进入后第一个道岔编码为1,编码为1的道岔前方左侧再次出现的第一个道岔编码为10,编码为1的道岔前方右侧再次出现的第一个道岔编码为11,任意一个编码为x的道岔前方左侧再次出现的第一个道岔编码为x0,编码为x的道岔前方右侧再次出现的第一个道岔编码为x1,从编码为x的道岔到编码为x0道岔之间的轨道为x0编码的区间,从编码为x的道岔到编码为x1道岔之间的轨道为x1编码的区间,x为任意一个道岔的编码数字;步骤二、将道岔的二进制编码即分级道岔数据全部导入到每辆单轨吊车的车载可编程逻辑控制器,在每个车载可编程控制器中生成巷道的轨道编码即分级区间数据,形成巷道的拓扑逻辑图;步骤三、当一辆单轨吊车上的车载可编程控制器收到调度需求时(可通过无线信号接收),通过输入键盘输入目标区域和优先等级并发出控制指令,单轨吊车的优先等级根据所载货物确定,紧急需求货物、重而大的货物优先等级高,目标区域即为单轨吊车所要到达的轨道编码区域,可编程逻辑控制器收到控制指令后,比较目标区域轨道编码(比如为1010100)和当前位置轨道编码(比如为10101100),并生成规划路线,即从两个编码中找出从第一个数字起连续编码中最后一个相同的数字并将连续相同数字构成一个新的编码(如为10101)作为中转编码,规划路线为从当前位置轨道编码运行到中转编码然后运行到目标区域轨道编码(即从10101100
→
10101
→
1010100),可编程逻辑控制器控制单轨吊车按规划路线行驶到达目标区域。
8.每个道岔的三个方向安装有多个用于标明其道岔编码及相对道岔位置的的无源信标,每处轨道的区间可能的停车点(装货区或充电区等)前后都有一个用于标明其区间编码的无源信标,每辆单轨吊车上安装有射频信号识别装置,当单轨吊车路过任意一个无源信标时,射频信号识别装置识别该无源信标,并将对应的道岔编码或区间编码输入到车载可编程控制器,并通过人机界面显示当前所处的道岔编码和区间编码。
9.车载可编程控制器控制单轨吊车按规划路线行驶到达目标区域过程中,当其sta装置与任意一个道岔的小型基站ap建立连接后,可编程逻辑控制器将其对应的单轨吊车编号、优先等级、规划路线输送给道岔的小型基站ap,然后再输送给道岔控制器,道岔控制器根据规划路线控制道岔的换岔和锁定。
10.当同一个道岔的小型基站ap同时收到两个sta装置的连接信号时,检查两个不同sta装置发送信号中包含的优先等级,道岔控制器根据优先等级高的单轨吊车的规划路线控制道岔的换岔和锁定,同时发送信号通知优先等级低的单轨吊车进行避让。
11.本发明的有益效果是:本发明采用离线控制:不需要全覆盖、高质量的无线网络作为远程控制的必要条件;本发明采用边缘计算:不需要井上服务器和相应的逻辑程序;本发明采用车载射频定位:解决位置区间识别需要,不依赖精确定位。
附图说明
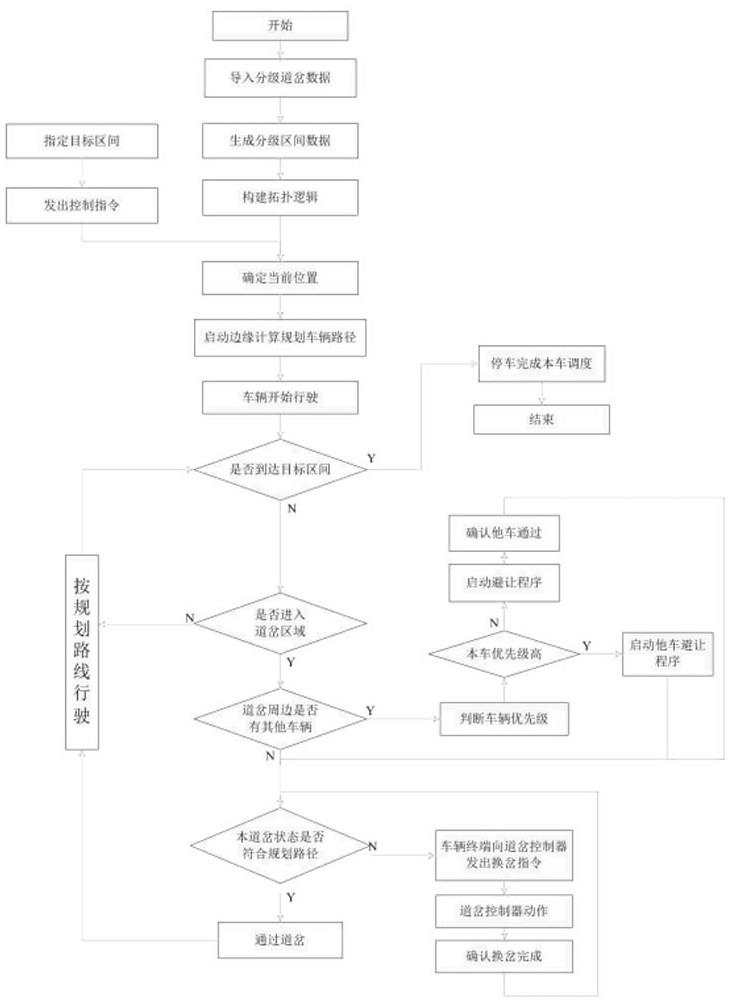
12.图1是本发明的分级道岔二进制拓扑示意图;图2是本发明的分级区间二进制拓扑示意图;图3是本发明的流程示意图。
具体实施方式
13.一种基于二进制拓扑和边缘算法的单轨吊离线调度系统,为了规避远程控制单轨吊对无线网络的依赖,我们提出了一种不需要实时无线信号作为车辆正常受控必要条件的控制方案——离线控制方案。
14.离线控制的关键在于,单轨吊车在接收到控制信号之后,自主行驶至目标,不需要实时以无线通讯为必要条件。
15.这就需要对单轨吊控制器的接收指令形式进行调整:现有两种方案的车辆接收的控制信号是停车、前进、后退之类的简单实时指令,指令依靠人工远程发出(方案一)或通过调度服务器依照上位机逻辑程序(方案二)发出。
16.本发明离线控制方案中:单轨吊接收的控制信号,是以“目标位置”的形式发出(类似于方案一中的调度服务器的“自主驾驶程序”)。由于车辆的行驶不依靠无线网络伴随,所以就不需要井上调度服务器。
17.在这样的条件下,“自主行驶至目标位置”的功能就两个重要的工作:1、对整个井下巷道路径的重新定义(二进制拓扑);2、车载设备具有边缘计算能力(解决区间自主识别和来车避让逻辑)。
18.方案的细节实现方法:一、符合巷道实际情况的拓扑逻辑的建立每辆单轨吊车都安装至少一个车载控制器(具有人机界面和输入键盘的车载可编程控制器),本控制器自带人机界面和输入键盘,并具有逻辑控制和边缘计算能力。
19.拿到巷道图(现有)之后,首先规划轨道和道岔分布。之后,按照分级道岔二进制拓扑示意图,在车载控制器上输入底层参数,包括:a“道岔级数”——确定巷道拓扑图深度;b“每一级道岔的底层编码”:对道岔进行二进制编码并输入到对应的道岔控制器中,将巷道入口进入后第一个道岔编码为1,编码为1的道岔前方左侧再次出现的第一个道岔编码为10,编码为1的道岔前方右侧再次出现的第一个道岔编码为11,任意一个编码为x的道岔前方左侧再次出现的第一个道岔编码为x0,编码为x的道岔前方右侧再次出现的第一个道岔编码为x1,从编码为x的道岔到编码为x0道岔之间的轨道为x0编码的区间,从编码为x的道岔到编码为x1道岔之间的轨道为x1编码的区间,x为任意一个道岔的编码数字。
20.从第1级开始填写每一级道岔的“二进制编号”——通过填写本级道岔的二进制代码,可以确定下一级道岔可能的发展方向——如2级道岔只有“10
”ꢀ
(没有“11”)则巷道的发展方向则是“100”和“101”(而“11”之后的“110”和“111”也就被排除)......以此类推,巷道发展方向也可逐渐确定。
21.当填写完每一级的道岔二进制拓扑代码,整个巷道连同道岔的拓扑图就已经被确定下来。以数据的形式存储在车载控制器内。
22.车载控制器内的拓扑逻辑已经完成构建。
23.c“其他参数”——包括“车辆编号”、“车辆优先级”(优先级的设定是事先设置在车载控制器内部的,理论上每个车辆的优先级都不同,可以理解为每个车辆不重复的各占用一个阿拉伯数字,优先级的比较可以决定在需要错车的情况先的避让逻辑)。
24.二、道岔控制器 每一个三通道岔处会安装一个道岔控制器,用来控制机械道岔的换岔和锁定。道岔控制器具有逻辑编程功能:可以采样道岔状态、控制气动电磁阀变化道岔的左右开合以及限位锁定、发出指示信号、给本道岔区域的车辆发出调度信号。
25.三、以道岔为节点的无线网络以道岔控制器为固定ap(理解为小型基站),通过光缆或网线联通井下有线环网;车辆控制器为sta(设备)。当车辆(控制器)进入道岔(控制器)网络覆盖范围后就与道岔控制器建立连接(可以是1个或多个sta),ap与sta之间数据互换,实现功能对接和逻辑连锁。
26.每个道岔都安装具有逻辑编程功能的道岔控制器,用来控制当前道岔的换岔和锁定,每个道岔都安装有一个小型基站ap,每辆单轨吊车都安装有与小型基站ap配合联通的sta装置,在每辆单轨吊车运行到一个道岔附近时,单轨吊车与该道岔的小型基站ap建立无线连接。
27.可编程逻辑控制器控制单轨吊车按规划路线行驶到达目标区域过程中,当其sta装置与任意一个道岔的小型基站ap建立连接后,可编程逻辑控制器将其对应的单轨吊车编号、优先等级、规划路线输送给道岔的小型基站ap,然后再输送给道岔控制器,道岔控制器根据规划路线控制道岔的换岔和锁定。
28.四、位置的识别每个道岔安装有一个用于标明其道岔编码的无源信标,每处轨道的区间的停车点前后都有一个用于标明其区间编码的无源信标,每辆单轨吊车上安装有射频信号识别装置,当单轨吊车路过任意一个无源信标时,射频信号识别装置识别该无源信标,并将对应的道岔编码或区间编码输入到可编程逻辑控制器,并通过人机界面显示当前所处的道岔编码和区间编码。
29.相比于uwb等精确定位的方法(或者其他依托于大系统的方法),我们仅仅依靠射频识别的方式进行定位就可以完成调度需要。车载控制器上联通射频信号识别装置,识别安装于轨道上的无源信标——信标的张贴位置主要有a道岔三个方向——确定是否进入道岔区域(或某个区间)(均以二进制数形式);b用户需要到达的指定区间比如区间“1100”中的某个区段(比如装货区、充电区)张贴区别于普通二进制数标签的“特殊标签”。
30.五、调度逻辑与处理方法(算法) 二进制拓扑与巷道的情况已经确定,也就完成了实际工况数字建模工作。
31.射频识别装置确定了车辆的所在位置;车载控制器接收到“目标区间”和触发指令——首尾都确定,然后就开始“规划路径”,也就是算法。
32.通过识别车辆所在区域的二进制代码的长度就可以判断区间位置(几级区间的哪一段),同理判断目标区间的级数和具体位置。通过最高位开始向下比较,则可以判断出当前位置和目标位置的关系。
33.目标区域即为单轨吊车所要到达的轨道编码区域,车载可编程控制器收到控制指令后,比较目标区域轨道编码(比如为1010100)和当前位置轨道编码(比如为10101100),并生成规划路线,即从两个编码中找出从第一个数字起连续编码中最后一个相同的数字并将连续相同数字构成一个新的编码(如为10101)作为中转编码,规划路线为从当前位置轨道
编码运行到中转编码然后运行到目标区域轨道编码(即从10101100
→
10101
→
1010100),可编程逻辑控制器控制单轨吊车按规划路线行驶到达目标区域。
34.比如起始位置为“区段10”;目标位置为“区段11110”的情况——首先,中转编码是1,规划路线为从当前位置轨道编码运行到中转编码然后运行到目标区域轨道编码(即从10
→1→
11110),需要经过的详细道岔编码为10
→1→
11
→
111
→
1111然后直接到达区段11110停车区。在规划路线编码时,从开始位置编码起依次减少1,直到中转编码,然后按目标区段编码,依次递增1,直至到达目标区域轨道编码前一位的道岔编码,然后移动到目标轨道区段;注意本逻辑编码中未考虑1编码的情况,是因为在工作过程中不存在1编码区域停车的情况。
35.六、车辆通过道岔车辆通过道岔时会首先收到道岔的状态信息——若道岔状态符合规划路径,则车辆直接通过;若道岔状态不符合规划路径,则由车载控制器自动发出换岔信号,待换岔完毕,车辆通过。
36.七、错车当一辆以上车辆进入或即将进入道岔区域时,道岔控制器与多个车载控制器在短距离建立无线网络连接。对进入道岔区域多台车辆优先级比较,确定优先级较高的车辆获得控制道岔的权限,而优先级比较低的车辆启动避让程序(见图3)。
37.单轨吊车的优先等级根据所载货物确定,紧急需求货物、重而大的货物优先等级高。具体优先等级由工作人员预先设置好。
38.当同一个道岔的小型基站ap同时收到两个sta装置的连接信号时,检查两个不同sta装置发送信号中包含的优先等级,道岔控制器根据优先等级高的单轨吊车的规划路线控制道岔的换岔和锁定,同时发送信号通知优先等级低的单轨吊车进行避让。优先等级低的单轨吊车收到小型基站ap发来的避让信息中包含优先等级高的单轨吊车的规划路线,优先等级低的单轨吊车移动到优先等级高的单轨吊车的规划路线以外的路线等待额定时间(自己设定)后,再返回,按自己的规划路线行驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1