一种仿生海蟹机器人
1.本发明涉及机器人技术领域,具体的说是一种仿生海蟹机器人。
背景技术:
2.我国的仿生机器人技术发展速度较快,机器人仿生研究领域已然不仅仅局限于在地 球陆地环境下进行工作,而是向着海洋深处、矿产勘探、抢险救灾等未知环境下的自主 作业方向进行研究发展;按照目前的发展趋势,人类将使用更多的机器人在危险、未知 或人类难以到达的地方进行工作,因此仿生机器人不仅要能够适应已知的环境、结构化 的环境,还要能够适应非结构化的、未知的环境;
3.近些年来,国家对海洋的重视程度不断提高,现有的两栖机器人结构太复杂, 运动灵活性相对较差,不适应复杂的环境。
技术实现要素:
4.针对相关技术中存在的上述不足之处,目的是提供一种仿生海蟹机器人,以解决相 关技术中的机器人结构太复杂,运动灵活性相对较差,不适应复杂环境的技术问题。
5.实现目的的技术方案是:一种仿生海蟹机器人,包括:
6.中间躯干主体,为中空结构,用于形成支撑,并且用于连接、排布控制部分;
7.两个舵机,对称连接在所述中间躯干主体上;
8.以及两个足部结构,对称连接在所述中间躯干主体上,并且被所述舵机联动行走。
9.进一步的:所述中间躯干主体包括:底盖;两个侧盖,对称连接在所述底盖的侧壁 上;第一上盖,连接在所述底盖和所述侧盖上,与所述底盖和所述侧盖之间形成所述中 空结构;以及第二上盖,连接在所述第一上盖上,罩住密封所述中空结构。
10.进一步的:所述足部结构包括:第一支撑件,连接在所述中间躯干主体上;
11.第二支撑件,连接在所述第一支撑件上,并且与所述第一支撑件之间留有第一间隙;
12.第一齿轮组件,连接在所述第一间隙中,被所述舵机联动旋转;
13.第一伸缩足,连接在所述第一支撑件上,并且与所述第一齿轮组件连接;
14.第二伸缩足,连接在所述第一支撑件上,与所述第一伸缩足对面设置,并且与所述 第一齿轮组件连接;
15.第三伸缩足,连接在所述第二支撑件上,并且与所述第一齿轮组件连接;
16.以及第四伸缩足,连接在所述第二支撑件上,与所述第三伸缩足对面设置,并且与 所述第一齿轮组件连接;
17.所述第一伸缩足,所述第二伸缩足,所述第三伸缩足和所述第三伸缩足形成为四方 形对角排布。
18.进一步的:所述第一齿轮组件包括:主动齿轮,活动连接在所述第一支撑件和所述 第二支撑件之间,并且与所述舵机连接,被所述舵机联动旋转;第一从动齿轮,活动连 接在
机,30.足部结构,31.第一支撑件,32.第二支撑件,33.第一齿轮组件,331.主动齿轮, 332.第一从动齿轮,332-1.第一通孔,332-2.第二通孔,332-3.第三通孔,332-4.第四 通孔,333.第二从动齿轮,34.第一伸缩足,35.第二伸缩足,36.第三伸缩足,37.第四 伸缩足,341.第一连杆,342.第二连杆,343.足脚,344.第三连杆。
具体实施方式
37.为了使内容更容易被清楚地理解,下面根据具体实施例并结合附图,作进一步详细 的说明;
38.一种仿生海蟹机器人,解决了相关技术中的机器人结构太复杂,运动灵活性相对较 差,不适应复杂环境的技术问题,达到了结构紧凑,运动的灵活性相对较好,能够适应 相对复杂环境的积极效果,总体思路如下:
39.一实施方式:
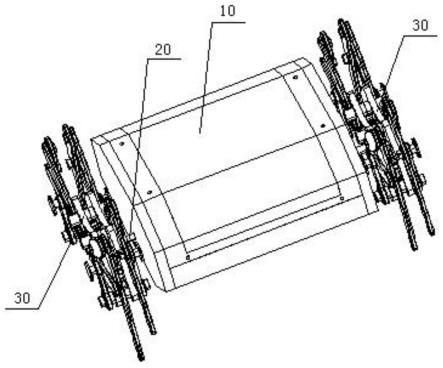
40.如图1所示;一种仿生海蟹机器人,包括:
41.中间躯干主体10,为中空结构,用于形成支撑,并且用于连接、排布控制部分;
42.两个舵机20,对称连接在所述中间躯干主体10上;
43.以及两个足部结构30,对称连接在所述中间躯干主体10上,并且被所述舵机20 联动行走;
44.具体来说,实施时,设置有中间躯干主体10,舵机20和足部结构30;中间躯干主 体10为中空结构,用于形成支撑,并且用于连接排布控制部分;舵机20动作,联动足 部结构30动作,实现了行走、转向,运动的灵活性相对较好,能够适应相对复杂的环 境;
45.另一实施方式:
46.如图1、图2所示;实施时,所述中间躯干主体10包括:底盖11;两个侧盖12, 对称连接在所述底盖11的侧壁上;第一上盖13,连接在所述底盖11和所述侧盖12上, 与所述底盖11和所述侧盖12之间形成所述中空结构;以及第二上盖14,连接在所述第 一上盖13上,罩住密封所述中空结构;底盖11、侧盖12、第一上盖13和第二上盖14, 采用折弯板材组合而成,组合后外形大致为菱形结构,外形相对美观,能够形成可靠的 支撑,并且形成了相对密封的中空结构,用于连接、排布控制部分,结构的可靠性较好;
47.另一实施方式:
48.如图1、图3、图4、图9所示;实施时,舵机20为现有技术中的常用结构,比如 130马达电动电机,目的是产生驱动力,本领域的普通技术人员,在看到公开的内容后, 能够直接地、毫无疑义地知晓如何设置,并不需要付出创造性的劳动,也不需要进行过 度的试验;
49.另一实施方式:
50.如图1、图3、图4、图5、图6、图7、图8所示;实施时,所述足部结构30包括: 第一支撑件31,连接在所述中间躯干主体10上;第二支撑件32,连接在所述第一支撑 件31上,并且与所述第一支撑件31之间留有第一间隙;第一齿轮组件33,连接在所述 第一间隙中,被所述舵机20联动旋转;第一伸缩足34,连接在所述第一支撑件31上, 并且与所述第一齿轮组件33连接;第二伸缩足35,连接在所述第一支撑件31上,与所 述第一伸缩足34对面设置,并且与所述第一齿轮组件33连接;第三伸缩足36,连接在 所述第二支撑件32上,并且与所述第一齿轮组件33连接;以及第四伸缩足37,连接在 所述第二支撑件32上,与所述第三伸缩足
36对面设置,并且与所述第一齿轮组件33 连接;所述第一伸缩足34,所述第二伸缩足35,所述第三伸缩足36和所述第三伸缩足 36形成为四方形对角排布;
51.第一支撑件31或者第二支撑件32为板状结构,外形大致为等腰梯形结构,上端具 有内凹的弧形面,相对美观,两者之间通过螺栓件连接,当舵机20联动第一齿轮组件 33旋转时,第一支撑件31和第二支撑件32不会跟转,形成了稳定的支撑结构;
52.所述第一齿轮组件33包括:主动齿轮331,活动连接在所述第一支撑件31和所述 第二支撑件32之间,并且与所述舵机20连接,被所述舵机20联动旋转;第一从动齿 轮332,活动连接在所述第一支撑件31和所述第二支撑件32之间,并且与所述主动齿 轮331啮合;以及第二从动齿轮333,活动连接在所述第一支撑件31和所述第二支撑件 32之间,并且与所述主动齿轮331啮合;主动齿轮331、第一从动齿轮332和第二从动 齿轮333,分别与第一支撑件31或者第二支撑件32之间通过轴承连接,使得主动齿轮 331、第一从动齿轮332和第二从动齿轮333能够自由的旋转,动作的灵活性较好;
53.所述第一从动齿轮332和所述第二从动齿轮333对称设置在所述主动齿轮331两侧; 所述第一从动齿轮332或者所述第二从动齿轮333上都具有第一通孔332-1,第二通孔 332-2,第三通孔332-3和第四通孔332-4;所述第一通孔332-1,所述第二通孔332-2, 所述第三通孔332-3和所述第四通孔332-4沿着圆周排布;所述第一通孔332-1与所述 第三通孔332-3对称设置;所述第二通孔332-2与所述第四通孔332-4对称设置;所述 第一通孔332-1和所述第三通孔332-3之间的中心连接线,与所述第二通孔332-2和所 述第四通孔332-4之间的中心连接线垂直设置;所述第一伸缩足34的局部与所述第一 从动齿轮332上的所述第三通孔332-3连接;所述第二伸缩足35的局部与所述第二从 动齿轮333上的所述第三通孔332-3连接;所述第三伸缩足36的局部与所述第一从动 齿轮332上的所述第一通孔332-1连接;所述第四伸缩足37的局部与所述第二从动齿 轮333上的所述第一通孔332-1连接;通过设置有不同位置的通孔,与伸缩足连接,使 得四方形对角排布的四个伸缩足,当第一伸缩足34和第四伸缩足37伸长抓地时,第二 伸缩足35和第三伸缩足36缩回,当第二伸缩足35和第三伸缩足36伸长抓地时,第一 伸缩足34和第四伸缩足37缩回,周期往复,实现了行走;当需要转向时,只需将两个 舵机20形成差速,使用的灵活性较好;
54.所述第一伸缩足34,所述第二伸缩足35,所述第三伸缩足36或者所述第四伸缩足 37的结构相同,都包括:第一连杆341,一端活动连接在所述第一支撑件31或者所述 第二支撑件32上;第二连杆342,一端活动连接在所述第一通孔332-1或者所述第三通 孔332-3处;足脚343,活动连接在所述第一连杆341和所述第二连杆342的另一端上, 凸出在所述第一支撑件31和所述第二支撑件32的外部,用于接触行走;以及第三连杆 344,活动连接在所述第二连杆342与所述第一支撑件31或者所述第二支撑件32之间; 设置有第一连杆341,第二连杆342,足脚343和第三连杆344,使得伸缩足能够可靠地 伸缩,实现了行走、转向;
55.另一实施方式:
56.如图1、图9所示;实施时,控制部分包括:红外遥控器,红外接收模块,主运动 控制器,北斗导航模块,舵机模块,微型摄像头,液晶显示屏,红外避障模块,漏水检 测模块,电源稳压芯片以及数据采集模块;红外遥控器为ir03t型;红外接收模块为 hx183b型,用于接收信号反馈给主运动控制器;主运动控制器为223-1hf22-0xa8型, 用于传送信号;北斗导航模块为atk1218-bd型,用于位置定位;舵机模块为pca9685 型,用于控制舵机20动作,实
现行走、转向;微型摄像头为hbv-1807-720p v11型, 用于观察、记录环境情况;液晶显示屏为gme12864-50型,用于显示机器人运行状况; 红外避障模块用于规避障碍;漏水检测模块为sw1型,用于用于发出警报;电源稳压芯 片为ads1248ipwr型;数据采集模块为ad7606型;本领域的普通技术人员,在看到公 开的内容后,能够直接地、毫无疑义地知晓如何设置控制部分,并不需要付出创造性的 劳动,也不需要进行过度的试验;
57.工作原理如下:中间躯干主体10为中空结构,用于形成支撑,并且用于连接排布 控制部分;控制部分进行自动化控制,驱动舵机20动作,舵机20联动足部结构30动 作,实现了行走、转向,运动的灵活性相对较好,能够适应相对复杂的环境;
58.描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示方位 或位置关系是基于附图所述的位置关系,仅是为了便于描述或简化描述,而不是指示必 须具有的特定的方位;实施例中描述的操作过程不是绝对的使用步骤,实际使用时,可 以做相应的调整;
59.除非个别作定义,此处使用的技术术语或者科学术语应当为所属领域内具有一般技 能的人士所理解的通常意义;说明书以及权利要求书中使用的“第一”、“第二”以及类 似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分,同样,
ꢀ“
一个”或者“一”等类似词语也不决定表示数量限制,而是表示存在至少一个,需根 据实施例的内容确定;
60.以上所述,仅为较佳的具体实施方式,但保护范围并不局限于此,任何熟悉本技术 领域的技术人员揭露的技术范围内,根据技术方案及其发明构思加以等同替换或改变, 都应涵盖在保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1