一种轮腿结构及应用其的机器人的制作方法
1.本实用新型属于机器人技术领域,尤其涉及一种轮腿结构及应用其的机器人。
背景技术:
2.目前常见的轮腿式或足式机器人运动状态较为单一,其二自由度轮腿式腿部机构,大多用单个旋转动力源控制单个自由度,两个旋转动力源不能形成合力,同时在连杆长度一定情况下旋转动力源旋转角度范围有限,限制了双足轮式机器人升降和跳跃的动力和运动范围,此外,该类机器人的轮腿结构设计上大多非模块化,复杂的结构不易拆装维护。
技术实现要素:
3.本实用新型的目的是提供一种轮腿结构及应用其的机器人,能够增加升降和变形范围,以及提升轮腿结构的动力效率。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种轮腿结构,包括:动力装置、连杆装置和脚轮装置,所述动力装置和所述脚轮装置之间通过所述连杆装置连接;
6.所述连杆装置包括主动连杆组和从动连杆组,所述主动连杆组包括第一主动连杆和第二主动连杆,所述第二主动连杆包括有主杆以及与所述主杆呈h型的副杆,所述副杆与所述动力装置连接,所述第一主动连杆连接于所述主杆一侧并与所述动力装置连接;
7.所述主动连杆组在所述动力装置的驱动下带动所述从动连杆组转动实现所述连杆装置的长度伸缩和角度摆动。
8.进一步地,所述动力装置包括有与所述主动连杆组对应数量的动力源,所述动力源包括有同轴设计的第一动力源和第二动力源。
9.进一步地,其还包括连接件,所述连接件固设于所述第一动力源和所述第二动力源之间,将所述第一动力源同轴固定连接在所述第二动力源外侧。
10.更进一步地,所述第一动力源远离所述第二动力源的一端与所述第一主动连杆连接,用于驱动所述第一主动连杆;
11.所述第二动力源与所述副杆连接,用于驱动所述第二主动连杆。
12.进一步地,所述从动连杆组包括第一从动连杆和第二从动连杆,所述第一从动连杆的一端与所述第一主动连杆铰接,另一端与所述脚轮装置连接;
13.所述第二从动连杆的一端与所述主杆铰接,另一端与所述脚轮装置连接。
14.进一步地,所述脚轮装置包括脚轮和脚轮动力源,所述脚轮动力源驱动所述脚轮转动。
15.进一步地,其还包括固定装置,所述固定装置包括固定板以及设于所述固定板中间的第一固定件,所述动力装置通过所述第一固定件固定连接在所述固定板上。
16.进一步地,所述固定装置还包括第二固定件,所述第二固定件一端与所述连接件固定连接,一端与所述固定板固定连接。
17.一种机器人,包括所述的轮腿结构。
18.由以上本技术实施方式提供的技术方案可见,本实用新型通过包括主动连杆组和从动连杆组的连杆装置,结合包括有同轴设计的两个动力源的动力装置,使得该轮腿结构在连杆长度相同情况下拥有更大的高度升降范围、跳跃蓄能以及下落缓冲范围,并且同轴设计的动力源能够提升轮腿结构的动力效率;并利用h型的第二主动连杆,使得内侧的第一主动连杆在完全长度伸缩和角度摆动时与第二主动连杆的副杆之间形成限位点,不用额外设计限位结构。
附图说明
19.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
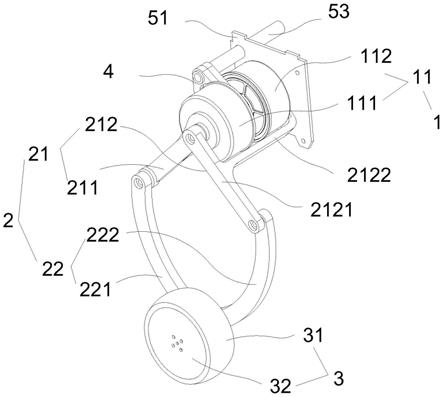
20.图1为本实用新型实施例一提供的轮腿结构的立体结构示意图;
21.图2为本实用新型实施例一提供的轮腿结构的不包含连杆装置的爆炸结构示意图;
22.图3为本实用新型实施例一提供的轮腿结构的状态为完全压缩的立体结构示意图;
23.图4为本实用新型实施例一提供的轮腿结构的状态为完全伸长的立体结构示意图;
24.图5为本实用新型实施例二提供的应用轮腿结构的机器人的示意图。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.实施例一
27.本技术的该实施例提供了能够增加升降范围,并利用连杆装置2的结构设计简化机器人的结构和构建成本的一种轮腿结构,如图1和图2所示,其包括动力装置1、连杆装置2和脚轮装置3,所述动力装置1和所述脚轮装置3之间通过所述连杆装置2连接,其中所述连杆装置2包括主动连杆组21和从动连杆组22,所述主动连杆组21在所述动力装置1的驱动下带动所述从动连杆组22转动实现所述连杆装置2的长度伸缩和角度摆动,所述脚轮装置3包括脚轮31和脚轮动力源32,所述脚轮动力源32驱动所述脚轮31转动,脚轮装置3则带动整体的轮腿结构移动。
28.所述主动连杆组21包括第一主动连杆211和第二主动连杆212,所述第二主动连杆212包括有主杆2121以及与所述主杆2121呈h型的副杆2122,其中所述主杆2121与所述副杆2122可以一体成型,所述副杆2122与所述动力装置1连接,所述第一主动连杆211连接于所述主杆2121一侧并与所述动力装置1远离所述副杆2122的一端连接,这样,如图2所示,第一主动连杆211与动力装置1连接,第二主动连杆212的h型的两端即主杆2121和副杆2122分别于第一主动连杆211和动力装置1的另一端连接。
29.另外,在本实施例中,所述动力装置1包括有与所述主动连杆组21对应数量的动力源11,所述动力源11包括有同轴设计的第一动力源111和第二动力源112,两个动力源11的转子方向不同,同轴设计的两个动力源11简化了机体的动力学建模,从而使软件控制器设计更简单,更易于结构的优化。
30.其中所述第一动力源111远离所述第二动力源112的一端与所述第一主动连杆211连接,用于驱动所述第一主动连杆211;所述第二动力源112与所述副杆2122连接,用于驱动所述第二主动连杆212。
31.所述从动连杆组22包括第一从动连杆221和第二从动连杆222,所述第一从动连杆221的一端与所述第一主动连杆211铰接,另一端与所述脚轮装置3连接;所述第二从动连杆222的一端与所述主杆2121铰接,另一端与所述脚轮装置3连接。
32.所述主动连杆组21和所述从动连杆组22相铰接形成了船型四连杆机构,并且如图1所示,第一主动连杆211和第一从动连杆221与第二主动连杆212和第二从动连杆222的连接相反,这样能够提高连杆装置2抵抗脚轮装置3运转时的轴向应力的能力,提升了整体的牢固度。
33.本实施例中,同轴设计的两个动力源11能够形成合力,能够提升轮腿结构的动力效率,结合连杆装置2形成的船型结构可以在连杆长度相同情况下比现有腿部结构伸缩范围、旋转动力源11做功行程增加至少60%,使其拥有更大的高度升降范围,跳跃蓄能和下落缓冲范围。
34.由于两个动力源11的转子的方向不同,并且第一动力源111连接的第一主动连杆211在第二主动连杆212的主杆2121和副杆2122之间,故在所述主动连杆组21带动所述从动连杆组22完全压缩或者伸长时,如图3和图4所示,第二主动连杆212与所述副杆2122的横杆部分相抵持,即该接触点形成角度限位点,能够防止轮腿结构过度变形。
35.本实施例提供的轮腿结构,如图2所示,其还包括连接件4,所述连接件4固设于所述第一动力源111和所述第二动力源112之间,将所述第一动力源111同轴固定连接在所述第二动力源112外侧。
36.所述轮腿结构还包括固定装置5,用于将轮腿结构与轮腿结构甚至和机器人机体之间相固定连接,如图2所示,所述固定装置5包括固定板51以及设于所述固定板51中间的第一固定件52,所述动力装置1通过所述第一固定件52固定连接在所述固定板51上,本实施例的轮腿结构在连接件4和固定板51的设计上考虑了应用的机器人结构设计上的安装整合的需求,留有坚固可靠,易于安装拆卸的机械接口,这样能够实现模块化安装,易于整合,还可以在保证结构强度情况下减少结构连接件4的占用空间重量。
37.所述固定装置5还包括第二固定件53,所述第二固定件53一端与所述连接件4固定连接,一端与所述固定板51固定连接,所述第二固定件53可以是碳管。本实施例中包括有两个第二固定件53,并且动力源11之间的连接件4上有供所述第二固定件53连接的通孔,这样在第二固定件53连接固定板51和连接件4后,连接件4上与第二固定件53和动力源11的三个连接点构成三角形,可以本技术的使轮腿结构于机器人机体的连接抵抗各个方向的应力,增加其硬度,同时节省了安装资源。
38.通过上述实施例,可以看出本技术通过将于动力装置1相连的主动连杆组21中的第二主动连杆212设定为h型,将第一主动连杆211和动力装置1连接在构成h型的主杆2121
和副杆2122之间,这样在所述主动连杆组21带动所述从动连杆组22完全压缩或者伸长时,第二主动连杆212与所述副杆2122的横杆部分相抵持,即该接触点形成角度限位点,能够防止轮腿结构过度变形;并且动力装置1中的两个动力源11为同轴设计,能够形成合力提升轮腿结构的动力效率,结合连杆装置2形成的船型结构在连杆长度相同情况下相较于现有腿部结构能够增加其伸缩范围和旋转动力源11做功行程,使其拥有更大的高度升降范围,跳跃蓄能和下落缓冲范围,还可以在保证其强度情况下减少结构连接件4的占用空间重量。
39.实施例二
40.本技术的该实施例提供了一种应用本技术的轮腿结构的机器人,如图5所示,该机器人包括实施例一提供的轮腿结构,通过第二固定件53将轮腿机构想固定连接,两端的轮腿结构使得机器人既可以在伸长站立状态下实现稳定的运行,又可以在压缩折叠状态下实现稳定的运行,并且当轮腿结构的伸缩状态不同是可以改变机器人的移动方向等,应用本技术提供的轮腿结构不仅能够解决机器人运动状态较为单一和伸缩变形范围受限的问题,还能够利用轮腿结构的动力装置11的结构设计提升机器人的轮腿结构的动力效率。
41.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1