一种新型行李箱辅助运输及爬楼智能机器人
1.本实用新型涉及行李箱运输技术领域,尤其涉及一种新型行李箱辅助运输及爬楼智能机器人。
背景技术:
2.行李箱,亦称旅行箱、拉杆箱,是出门时所携带用以放置物品的箱子,它是行李的其中一种类型,通常行李箱是用来放置旅途上所需要的衣物、个人护理用品及纪念品,行李箱的搬运是各种运输行业中较为重要的部分,一般均需要利用输运装置进行搬运;
3.传统的方便搬运的行李箱在市场上的价格较为昂贵,而且现有的辅助行李箱装置在爬楼上仅采用三轮传动模式,容易卡住且使用不便,从而会行李箱损坏的问题,因而在楼梯上时需要人为进行搬运,人为搬运劳动力消耗较大,不便行李箱的输运使用,因而我们需要设计一款新型行李箱辅助运输及爬楼智能机器人。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中不便于爬楼的缺点,而提出的一种新型行李箱辅助运输及爬楼智能机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种新型行李箱辅助运输及爬楼智能机器人,包括多个承重板,其中两个所述承重板的底部均固定有动力轮,另外两个所述承重板的底部均固定有万向轮,每个所述承重板的上端均固定有围板,其中一个所述围板的前端固定有主板,每个所述围板均通过短细钢管和长细钢管与其他相邻的围板连接,两个所述承重板的底部共同设置有爬坡装置,其中一个所述承重板的上端设置有辅助装置。
7.优选地,所述爬坡装置包括与两个承重板底部通过销轴转动连接的两个履带,两个所述履带的侧壁均固定有挡板,两个所述挡板相靠近的侧壁均通过铰链转动连接有折叠轴。
8.优选地,所述折叠轴的侧壁通过铰链转动连接有两个支撑杆的一端,两个所述支撑杆的另一端分别与两个围板侧壁通过铰链转动连接。
9.优选地,其中一个所述承重板的上端固定有电源模块,所述电源模块为蓄电池,另外一个所述承重板的上端固定有驱动模块,所述驱动模块与动力轮和履带连接。
10.优选地,所述辅助装置包括固定于承重板上端的称重模块,所述称重模块与主板电性连接。
11.优选地,所述承重板的上端固定有定位模块,所述定位模块与称重模块均与电源模块电性连接。
12.与现有技术相比,本实用新型的优点在于:
13.1、本装置中,通过设置倾斜的履带,能够利用履带的运行使得行李箱输运机器人在楼梯上的自动运行,无需人为搬运即可实现上下楼操作,可有效避免在楼梯上运行过程
中车轮的损伤,进而可有效保证机器人的使用寿命,而且通过设置可折叠的折叠轴,能够在折叠轴折叠过程中实现履带倾斜角度的调整,可适用于在不同角度楼梯上的输运使用,可有效增加其适用性;
14.2、本装置中,通过设置在承重板上端的称重模块,能够对行李箱的重量进行测量,利用围板前端的主板实现对重量的显示,及时测重可以随时显示行李箱中物品的总重,方便将所携带物品重量控制在合理范围之内,可保证行李搬运辅助机器人的安全使用,结合定位模块的作用,能够实现运输机器人的实时定位,以防丢失、遭窃等情况发生。
附图说明
15.图1为本实用新型提出的一种新型行李箱辅助运输及爬楼智能机器人的主视图;
16.图2为本实用新型提出的一种新型行李箱辅助运输及爬楼智能机器人的俯视图;
17.图3为本实用新型提出的一种新型行李箱辅助运输及爬楼智能机器人的侧视图;
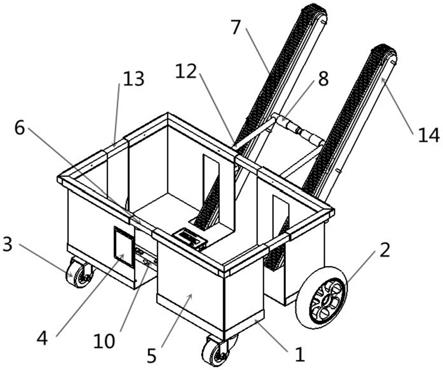
18.图4为本实用新型提出的一种新型行李箱辅助运输及爬楼智能机器人的结构示意图;
19.图5为本实用新型提出的一种新型行李箱辅助运输及爬楼智能机器人的仰视图。
20.图中:1承重板、2动力轮、3万向轮、4主板、5围板、6短细钢管、7履带、8折叠轴、9电源模块、10称重模块、11定位模块、12支撑杆、13长细钢管、14挡板、15驱动模块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图1-5,一种新型行李箱辅助运输及爬楼智能机器人,包括多个承重板1,其中两个承重板1的底部均固定有动力轮2,另外两个承重板1的底部均固定有万向轮3,每个承重板1的上端均固定有围板5,其中一个围板5的前端固定有主板4,每个围板5均通过短细钢管6和长细钢管13与其他相邻的围板5连接,使得围板5可沿着短细钢管6和长细钢管13上滑动,进而可实现对机器人大小进行调整,两个承重板1的底部共同设置有爬坡装置,其中一个承重板1的上端设置有辅助装置。
23.爬坡装置包括与两个承重板1底部通过销轴转动连接的两个履带7,两个履带7的侧壁均固定有挡板14,两个挡板14相靠近的侧壁均通过铰链转动连接有折叠轴8,折叠轴8为可沿着中心沿两端转动的轴,履带7采用橡胶材质制成,可节约成本,增大爬楼时的摩擦力;折叠轴8的侧壁通过铰链转动连接有两个支撑杆12的一端,两个支撑杆12的另一端分别与两个围板5侧壁通过铰链转动连接,支撑杆12可选用刚性杆时,能够保证履带7的稳定性,实现履带7偏转角度的轻微调整,支撑杆12也可选用弹性杆,可方便对履带7偏转角度的任意调整;其中一个承重板1的上端固定有电源模块9,电源模块9为蓄电池,另外一个承重板1的上端固定有驱动模块15,驱动模块15与动力轮2和履带7连接,通过设置倾斜的履带7,能够利用履带7的运行使得行李箱输运机器人在楼梯上的自动运行,无需人为搬运即可实现上下楼操作,可有效避免在楼梯上运行过程中车轮的损伤,进而可有效保证机器人的使用寿命,而且通过设置可折叠的折叠轴8,能够在折叠轴8折叠过程中实现履带7倾斜角度的调
整,可适用于在不同角度楼梯上的输运使用,可有效增加其适用性。
24.辅助装置包括固定于承重板1上端的称重模块10,称重模块10与主板4电性连接,通过设置在承重板1上端的称重模块10,能够对行李箱的重量进行测量,利用围板5前端的主板4实现对重量的显示,及时测重可以随时显示行李箱中物品的总重,方便将所携带物品重量控制在合理范围之内,可保证行李搬运辅助机器人的安全使用;承重板1的上端固定有定位模块11,定位模块11与称重模块10均与电源模块9电性连接,而利用定位模块11,能够实现运输机器人的实时定位,以防丢失、遭窃等情况发生。
25.本实用新型中,在行李箱搬运输运过程中,通过拉动前端的两个围板5,使得两个围板5沿着长细钢管13滑动,进而可实现多个围板5围成面积大小的调整,可适用于不同大小的行李箱的搬运,能够有效增加行李辅助运输机器人的适用性,通过设置在承重板1上端的称重模块10,能够对行李箱的重量进行测量,利用围板5前端的主板4实现对重量的显示,及时测重可以随时显示行李箱中物品的总重,方便将所携带物品重量控制在合理范围之内,可保证行李搬运辅助机器人的安全使用;
26.然后通过启动动力轮2,结合万向轮3的运行,可方便行李运输机器人的运行,无需人为对行李箱进行搬运,可大大减少劳动力消耗,而且可利用倾斜设置的履带7与楼梯斜面相抵,能够利用履带7的运行实现行李箱辅助运输机器人在楼梯上的运行,能够方便行李箱运输机器人行李的输送,使得行李箱上、下楼困难问题得以解决,而且可减少车轮的损伤,使得行李箱运输机器人使用寿命更长,而且可利用定位模块11,能够实现运输机器人的实时定位,以防丢失、遭窃等情况发生;
27.而在转动折叠轴8过程中,能够实现折叠轴8两端绕折叠轴8中心的转动,能够在折叠轴8端部转动过程中实现两个履带7的相互靠近,进而可实现两端的承重板1沿着短细钢管6的滑动,同时在折叠轴8端部绕挡板14侧壁转动过程中,能够实现支撑杆12沿着围板5的转动,进而可使得履带7绕着承重板1底部旋转,能够实现对履带7倾斜角度的控制,可适用于在不同角度楼梯上的输运使用,可使得输运机器人的适用性更强。
28.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1