一种变构型球臂一体化球形机器人
1.本发明涉及一种变构型球臂一体化球形机器人,具体地说一种带有机械臂的球形机器人,可以通过结构变形的方式分别以球式、双轮式、四足式和多机协同的形式进行对外操作和运动,属于机器人领域。
背景技术:
2.球形机器人是近20年前才出现的一种新型移动机器人,是传统移动机器人的有益补充,其移动方式较为特殊,依靠内部驱动单元驱动球壳实现全方位移动,其机械结构、电子设备都置于球壳内部。现有的球形机器人主要是以整球滚动的形式进行移动,或在球体内部增加机构来提高球形机器人的通过性,大多数并未考虑对球体本身进行2次变形来增加机器人的运动能力。现有的可实现对外操作的球形机器人大多数是在球体内部加装机械臂,并未进一步考虑到加装的机械臂对于球形机器人的更深层次含义。
3.申请号为201720818138.1公开的一种球形变胞机器人,该机器人包括支撑框架、伸缩组件、上肢组件和下肢组件,其中支撑框架上安装有上下导轨板、主舵机和齿轮传动机构等复杂组件,该机器人通过复杂的结构设计和传动,实现了球形机器人的变胞展开。该专利融合了球体形态的快速滚动能力,以及仿生多肢体行走的复杂地形适应能力,但其并不具备对外操作能力。
4.申请号为202110393069.5公开了一种带臂球形探测机器人,该机器人通过舵机驱动力和重摆及机械臂的重力作用下进行滚动,通过变形组件调节球形壳体展开或闭合,在球壳打开情况下实现机械臂的对外操作。该专利在球体内加装的机械臂仅能在球壳打开时实现对外操作,并未考虑到加装的机械臂对于球形机器人本身的作用。
5.随着人类活动范围的扩大和探索阶段的深入,在一些复杂多变的环境中,要求机器人具有结构协调、运动方式灵活、可对外操作等能力,单纯的球形移动机器人已经不利于实际应用。因此,本专利提出了一种变构型球臂一体化球形机器人,它可根据不同的环境进行形态结构变化,提高了机器人对环境的适应能力。
技术实现要素:
6.本发明的目的在于提出一种球形机器人设计方案,具体是以加装机械臂的方式,实现球形机器人在单球、双轮、四足、多球组合多种模式下的转换,实现机器人移动和对外探测等多种任务。
7.为实现上述目的,本发明提供的解决方案是:
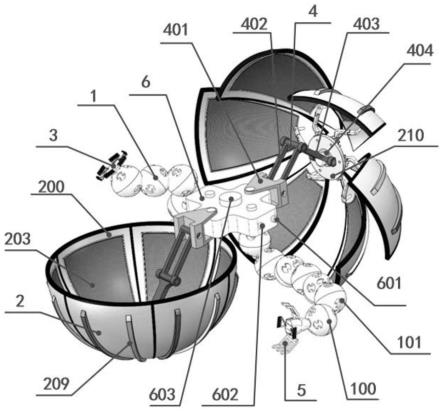
8.所述机器人包括核心臂(1)、可展开球壳(2)、攀附机构(3)、球壳连接臂(4)、末端执行手爪(5)、以及十字科学载荷控制平台(6)。所述核心臂(1)是两条分别由7个球形可对接关节(100)所组成的多自由度机械臂,其球形关节包括对接机构(101)、编码器(102)、驱控一体装置(103)、电机(104)、减速器(105)及力矩传感器(106)等。其每个球形关节的对接机构均可连接其他球形关节、攀附机
构(3)、末端执行手爪(5)等,核心臂(1)首段关节通过对接机构(101)与十字科学载荷控制平台(6)相连接。所述十字科学载荷控制平台(6)上有电池、红外传感器、照明设备、雷达传感等元件和核心臂(1)和球壳连接臂(4)的控制主板等装置与控制系统,是整个球形机器人的核心,控制平台另一端连接有球壳连接臂(4),用于控制球壳的开合。所述可展开球壳(2)包括由碳纤维制成,内表面附有太阳能膜片的瓣状球壳,球壳与球壳连接臂(4)连接处有旋转折展机构(210),可控制球壳的瓣状展开。
9.本发明的运动原理为:
10.球形构态下,机器人处于封闭状态,驱动原理是通过重摆改变球体重心位置以实现球体移动,具体是通过核心臂(1)来充当机器人的重摆,由核心臂的首关节旋转来改变机器人球形状态下的重心,以实现机器人的移动。
11.通过球壳连接臂(4)上的关节2(402),关节3(403)的展开使左右两球壳相对开启,使机器人进入双轮模式,在双轮模式下,整体机器人状态类似于两轮平衡车,可以按照双轮自主平衡和差速驱动原理实现移动,并且球壳连接臂(4)上的关节4(402)可以根据需求和地形约束,决定球壳开合大小和相对角度,使球壳形成直立双轮、内八字双轮和外八字双轮,充分发挥双轮形态下的机器人运动优势。
12.在直立双轮模式的基础上,使两条核心臂(1)的末端加装的攀附机构(3)或末端执行手爪(5)分别支撑地面,同时由关节2(402),关节3(403)的作用使核心平台相对地面抬升,进入四足模式,在四足模式下左右两球壳通过球壳连接臂上的关节2(402),关节3(403)实现上下抬升,通过关节1(401)进行左右方向的移动,从而实现球壳的步态运动。
13.在直立双轮模式的基础上,将一端的核心臂伸出,与其他同一模式下的机器人通过末端的可对接关节(100)上的对接机构(101)相互连接,连接后将另一端的核心臂(1)作为支撑接地,即完成了多足臂协作模式,根据已有球形机器人的数量和任务需求,可进行3球或4球等多球协作。在多足臂协作模式可大幅提升机器人的对外操作能力,实现大斜面凹凸地形攀爬和更大范围环境感知。
14.可展开球壳(2)的瓣状球壳(200)由碳纤维制成周围贴有梯形密封条(201),内表面附有太阳能膜片,球壳与球壳连接臂连接处有旋转折展机构(210),球壳可通过旋转折展机构中的驱动电机(205)带动驱动齿轮(206)和从动齿轮(207),实现对球壳的瓣状展开。
15.本发明的优点与效益:
16.本发明所述的一种变构型球臂一体化球形机器人,可以通过结构变形,使球形机器人变形为球式、双轮式、四足式和多机协同四种模式,既兼顾了球形机器人的运动灵活、自我保护性好等优点,又克服球形机器人对外操作性差的缺点,同时又将轮式机器人的运动效率高,腿式机器人的越障能力强等优点融合进了一个机器人中,使本发明所述机器人具有极强的环境适应能力,可以通过变形和多机协作的方式通过各种极端情况,同时其内部的核心机械臂用模块化关节搭建而成,具有非常强的变形开发潜力。所述中的可展开球壳是对普通球形机器人球壳的2次探索,依靠旋转折展机构和球壳连接臂的作用可使球壳内部的太阳能膜片始终面向阳光,解决了球形机器人运行的续航问题。
附图说明
17.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。
18.图1是所述球形机器人的整体结构内部示意图;
19.图2是机器人在球形构态下的示意图;
20.图3是双轮模式下的球形机器人的3种形态示意图;
21.图4是四足模式下的球形机器人的形态示意图;
22.图5是多足臂协作模式下3球协作和4球协作下的形态;
23.图6是球形可对接关节内部结构图;
24.图7末端执行手爪结构示意图;
25.图8是球壳展开示意图和旋转折展机构示意图;
26.图中的附图标记为:1-核心臂2-可展开球壳3-攀附机构4-球壳连接臂5-末端执行手爪6-十字科学载荷控制平台100-球形可对接关节101-对接机构102-编码器103-驱控一体装置104-电机105-减速器106-力矩传感器200-瓣状球壳201-梯形密封条202-环形天线203-太阳能膜片204-橡胶轮刺205-驱动电机206-从动齿轮207-从动齿轮210-旋转折展机构301-柔性倒钩阵列401-关节1402-关节2403-关节3404-关节4501-驱动电机502-驱动齿轮503-从动齿轮504-二指手爪601-红外传感器602-照明设备603-雷达传感
具体实施方式
27.为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
28.如图1所示为变构型球臂一体化球形机器人的总体示意图,此图是为了更好的展示机器人内部结构示意图,为变形过程示意图,需注意此状态下机器人处于不稳定状态。
29.如图2所示为本发明在球形构态下的示意图,机器人此时处于封闭状态,球壳连接臂(4)与关节4(404)通过驱动电机收紧使瓣状球壳(200)处于收紧状态,球壳边缘的梯形密封条(201)确保此状态下机器人内部与外界隔离,当机器人需要在此状态下移动时,两条核心臂(1)的首关节进行同向旋转,改变球型状态下的重心位置,使球体进行移动,当需要停止时由首关节反向旋转使球体重心反向偏移完成减速到停止,球壳外表面的橡胶轮刺(204)可以为球体提供良好的抓地力。
30.如图3所示是双轮模式下的球形机器人的3种形态,变形方式为在球形构态的基础上,通过球壳连接臂(4)上的关节2(402)与关节3(403)在保证球壳稳定的情况下进行配合展开,展开过程中两条核心臂通过科学载荷控制平台的控制,调整球体重心,使机器人始终处于平衡状态,在进入双轮模式后,根据运行地形的约束通过关节(1)和关节(3)的调节使
球壳相对开合或偏置合适的角度,使机器人在此状态下的运动稳定
31.如图3所示在双轮模式下球壳可左右相对开启和位姿变换,按照双轮自主平衡和差速驱动原理实现移动,并根据任务需求和地形约束决定球壳开合大小和相对位姿。
32.如图4所示为机器人的四足模式示意图,变形过程为首先由球壳连接臂打开球壳后,使两条核心臂(1)的末端加装的攀附机构(3)或末端执行手爪(5)分别接地支撑,同时由关节2(402),关节3(403)的作用使核心平台相对地面抬升,即进入四足模式,在四足模式下左右两球壳通过球壳连接臂(4)上的关节2(402),关节3(403)实现上下抬升,通过关节1(401)进行左右方向的移动,从而实现球壳与核心臂配合下的步态运动。
33.如图4所示当机器人需要越过有一定高度差的平台时,机器人可选择进入四足模式,通过步态调整使机器人的一条核心臂(1)贴近平台,由靠近端的核心臂上的关节配合使核心臂越过平台,再由另一端的核心臂作为支撑,两个球壳由球壳连接臂(4)抬升越过平台,最后收回后端核心臂即可越过平台。
34.如图5所示为机器人多足臂协作模式示意图,变形过程为首先由球壳连接臂打开球壳后,一端的核心臂(1)作为支撑接地,另一端的核心臂作为连接臂,通过核心臂(1)末端的可对接关节(100)上对接机构(101)相互连接,形成稳定结构,即进入多足臂协作模式,图4所示分别为3球和4球形态。
35.如图5所示多足臂协作模式下的运动,与多足式机器人的运动原理类似,通过协作模式下的各个机器人的支撑核心臂(1)作为运动足,完成整体的同步移动,例如在4球协作模式下,通过对角足同时移动的仿生移动方式即可实现运动,在多足臂协作模式可大幅提升机器人的对外操作能力,实现大斜面凹凸地形攀爬和更大范围环境感知。
36.如图6所示为球形可对接关节(100)剖视图,其球形可对接关节包括对接机构(101)、编码器(102)、驱控一体装置(103)、电机(104)、减速器(105)及力矩传感器(106)等,关节单元具有高度集成性和模块化,每个球形关节设置有6个不同朝向的具有机械连接、通信和动力传输功能的自动对接机构(101),可用于攀附机构、末端执行手爪(5)和其他关节的多维自动联结。
37.如图8所示为机器人可展开球壳(2)单元结构,瓣状球壳(200)由碳纤维制成,周围贴有梯形密封条(201),内表面附有太阳能膜片(203),环形天线(202)围绕太阳能膜片布置,外表面附有橡胶轮刺(204),球壳与球壳连接臂连接处有旋转折展机构(210),球壳可通过旋转折展机构中的驱动电机(205)带动驱动齿轮(206)和从动齿轮(207),实现对球壳的瓣状展开。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1