一种改进型水上行走机器人的制作方法
1.本实用新型属于电子技术领域,尤其涉及一种改进型水上行走机器人。
背景技术:
2.目前,在地面上运动和在水面下游动的仿生机器人非常多,但是能够利用表面张力在水面上行走的机器人并不多见.水上行走机器人仿生水黾(俗称“水蜘蛛”),也称为水蜘蛛机器人、水黾机器人、水上漂浮机器人,其特点是利用表面张力在水面上站立和行走,运动中不受液体粘性阻力,相比于舰船及潜器可大大降低运动能耗,提高工作效率.此外,水上行走机器人因其特殊的运动方式,不会在浅水区搁浅,运动过程对液体的扰动也非常小,因此在侦察勘测、水质监控、液面清污等领域具有十分重要的应用前景。
3.但是,现有的水上行走机器人还存在着该装置防护效果较差和不便于增加其漂浮的效果的问题。
4.因此,发明一种改进型水上行走机器人显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种改进型水上行走机器人,以解决现有的水上行走机器人该装置防护效果较差和不便于增加其漂浮的效果的问题。一种改进型水上行走机器人,包括控制板,红外接收头,第一电池,第二电池,控制器,可保护安装壳结构,电机,驱动腿,支撑腿和可拆装漂浮壳结构,所述的控制板安装在可保护安装壳结构的内部;所述的红外接收头电性连接在控制板上部的右侧;所述的第一电池和第二电池分别电性连接在控制板上部的中左侧和中右侧;所述的控制器电性连接在控制板上部的左侧;所述的电机分别螺栓安装在可保护安装壳结构内部的前后两侧;所述的驱动腿联轴器连接在电机的输出轴上;所述的支撑腿安装在可保护安装壳结构的下端,且支撑腿外壁上安装有可拆装漂浮壳结构;所述的可保护安装壳结构包括组装壳,组装腔,加护垫,支撑边,密封板和观察板,所述的组装腔开设在组装壳的内部,且组装腔内壁前后两侧的下方螺栓安装有电机;所述的加护垫胶接在组装腔的内壁上;所述的支撑边分别一体化设置在组装腔内壁的左右两侧,且支撑边的上表面螺栓安装有控制板;所述的密封板螺栓安装在组装壳的上端,且密封板的内部镶嵌有观察板。
6.优选的,所述的可拆装漂浮壳结构包括连接板,气囊,进气管,阀门,固定板,套板和锁紧螺栓,所述的气囊胶接在连接板的下表面;所述的进气管穿过连接板胶接在气囊的右侧上部;所述的阀门螺纹连接在进气管的上部;所述的固定板分别胶接在套板前后表面的下部;所述的套板套接在支撑腿上,且套板的上端螺纹连接有锁紧螺栓。
7.优选的,所述的气囊设置在支撑腿的下部,所述的气囊通过进气管连通,且进气管通过阀门密封。
8.优选的,所述的套板设置为u型,所述的套板上的固定板设置有两个,所述的固定板内部设置有螺纹孔,且固定板与连接板螺栓连接。
9.优选的,所述的锁紧螺栓设置在套板的上方。
10.优选的,所述的组装腔上端通过密封板密封住,且组装腔内部分别设置有控制板、红外接收头、第一电池、第二电池、控制器和电机。
11.优选的,所述的组装腔内壁上的加护垫采用发泡塑料防潮垫。
12.优选的,所述的观察板采用钢化玻璃板,所述的观察板与控制板对应。
13.与现有技术相比,本实用新型的有益效果为:
14.1.本实用新型中,所述的气囊设置在支撑腿的下部,所述的气囊通过进气管连通,且进气管通过阀门密封,便于进行注入气体时气囊膨胀,从而增加了漂浮的效果。
15.2.本实用新型中,所述的套板设置为u型,所述的套板上的固定板设置有两个,所述的固定板内部设置有螺纹孔,且固定板与连接板螺栓连接,便于固定在支撑腿上合适的位置处进行使用,从而便于进行使用。
16.3.本实用新型中,所述的锁紧螺栓设置在套板的上方,在使用时,拧紧锁紧螺栓即可顶住支撑腿,从而增加了可拆装漂浮壳结构安装处的固定效果,避免了轻易移动。
17.4.本实用新型中,所述的组装腔上端通过密封板密封住,且组装腔内部分别设置有控制板、红外接收头、第一电池、第二电池、控制器和电机,进而增加了防护的效果,从而避免了轻易被损坏影响使用。
18.5.本实用新型中,所述的组装腔内壁上的加护垫采用发泡塑料防潮垫,进而在使用时,起到了防潮的效果,从而增加了其防护的效果。
19.6.本实用新型中,所述的观察板采用钢化玻璃板,所述的观察板与控制板对应,便于观察该控制板、红外接收头、第一电池、第二电池和控制器的情况。
附图说明
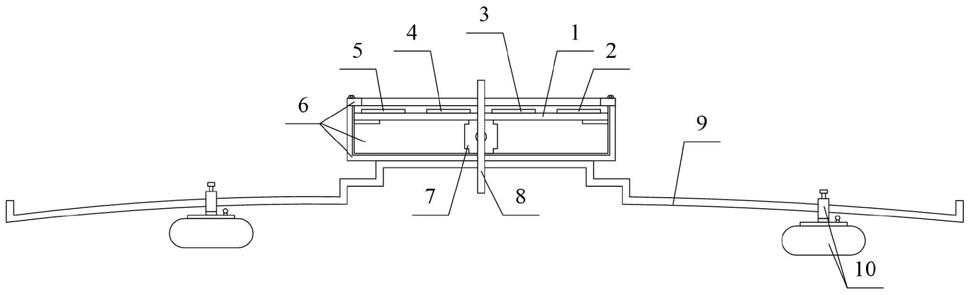
20.图1是本实用新型的结构示意图;
21.图2是本实用新型的可拆装漂浮壳结构的结构示意图;
22.图3是本实用新型的可保护安装壳结构的结构示意图。
23.图中:
24.1、控制板;2、红外接收头;3、第一电池;4、第二电池;5、控制器;6、可保护安装壳结构;61、组装壳;62、组装腔;63、加护垫;64、支撑边;65、密封板;66、观察板;7、电机;8、驱动腿; 9、支撑腿;10、可拆装漂浮壳结构;101、连接板;102、气囊;103、进气管;104、阀门;105、固定板;106、套板;107、锁紧螺栓。
具体实施方式
25.以下结合附图对本实用新型做进一步描述:
26.实施例:
27.如附图1和附图2所示,一种改进型水上行走机器人,包括控制板1,红外接收头2,第一电池3,第二电池4,控制器5,可保护安装壳结构6,电机7,驱动腿8,支撑腿9和可拆装漂浮壳结构10,所述的控制板1安装在可保护安装壳结构6的内部;所述的红外接收头2电性连接在控制板1上部的右侧;所述的第一电池3和第二电池4分别电性连接在控制板1上部的中左侧和中右侧;所述的控制器5 电性连接在控制板1上部的左侧;所述的电机7分别螺栓安
装在可保护安装壳结构6内部的前后两侧;所述的驱动腿8联轴器连接在电机 7的输出轴上;所述的支撑腿9安装在可保护安装壳结构6的下端,且支撑腿9外壁上安装有可拆装漂浮壳结构10;所述的可保护安装壳结构6包括组装壳61,组装腔62,加护垫63,支撑边64,密封板 65和观察板66,所述的组装腔62开设在组装壳61的内部,且组装腔62内壁前后两侧的下方螺栓安装有电机7;所述的加护垫63胶接在组装腔62的内壁上;所述的支撑边64分别一体化设置在组装腔 62内壁的左右两侧,且支撑边64的上表面螺栓安装有控制板1;所述的密封板65螺栓安装在组装壳61的上端,且密封板65的内部镶嵌有观察板66。
28.如附图3所示,上述实施例中,具体的,所述的可拆装漂浮壳结构10包括连接板101,气囊102,进气管103,阀门104,固定板105,套板106和锁紧螺栓107,所述的气囊102胶接在连接板101的下表面;所述的进气管103穿过连接板101胶接在气囊102的右侧上部;所述的阀门104螺纹连接在进气管103的上部;所述的固定板105分别胶接在套板106前后表面的下部;所述的套板106套接在支撑腿9 上,且套板106的上端螺纹连接有锁紧螺栓107。
29.上述实施例中,具体的,所述的气囊102设置在支撑腿9的下部,所述的气囊102通过进气管103连通,且进气管103通过阀门104密封,便于进行注入气体时气囊102膨胀,从而增加了漂浮的效果。
30.上述实施例中,具体的,所述的套板106设置为u型,所述的套板106上的固定板105设置有两个,所述的固定板105内部设置有螺纹孔,且固定板105与连接板101螺栓连接,便于固定在支撑腿9上合适的位置处进行使用,从而便于进行使用。
31.上述实施例中,具体的,所述的锁紧螺栓107设置在套板106的上方,在使用时,拧紧锁紧螺栓107即可顶住支撑腿9,从而增加了可拆装漂浮壳结构10安装处的固定效果,避免了轻易移动。
32.上述实施例中,具体的,所述的组装腔62上端通过密封板65密封住,且组装腔62内部分别设置有控制板1、红外接收头2、第一电池3、第二电池4、控制器5和电机7,进而增加了防护的效果,从而避免了轻易被损坏影响使用。
33.上述实施例中,具体的,所述的组装腔62内壁上的加护垫63采用发泡塑料防潮垫,进而在使用时,起到了防潮的效果,从而增加了其防护的效果。
34.上述实施例中,具体的,所述的观察板66采用钢化玻璃板,所述的观察板66与控制板1对应,便于观察该控制板1、红外接收头2、第一电池3、第二电池4和控制器5的情况。
35.工作原理
36.本实用新型的工作原理:在使用时,先根据需求使合适数量的气囊102通过连接板101处在支撑腿9上,之后将套板106套在支撑腿 9上,且使固定板105与连接板101螺栓连接固定住,最后拧紧锁紧螺栓107固定住连接板101,组装好之后,打开阀门104通过进气管103对气囊102注入气体膨胀,之后随之关闭阀门104,最后将组装壳61放到水面上,即可通过支撑腿9配合气囊102浮在水面上,同时,驱动电机7带动驱动腿8转动,即可推动组装壳61进行移动并工作。
37.利用本实用新型所述的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1