一种矢量型无轴泵喷推进器的制作方法
1.本发明型技术涉及水下动力领域,特别是公开一种矢量型无轴泵喷推进器,相对一般推进器,转向不损失、转向灵活、体积较小、重量轻、长寿命、拆装便捷、效率高、潜水更深,适应范围更广、智能化程度最高,且无论侧推船体进港靠岸,侧推船体前进加速,还是尾部单体主推,都能起到有效推进作用。
背景技术:
2.传统推进器单独使用时采取舵机挡水转向,转向过程能量损失严重,而且舵机操纵连接机械结构,效率较低,不灵活,机械磨损随使用时间延长而加大,转向精度也随之越来越差,特别不适合巨轮船体单发推进。
3.小吨位船体单推采用电机+螺旋桨,由于轴向长度较大,导致船尾悬空较大,而且采用自动转向机,会更加太高悬空空间,给船体造成更大的不平衡和安全隐患。
4.大吨位船体进港靠岸时,侧推横向移动效率较高,但基本采用电机+螺旋桨结构推进,轴向距离较长,通常专门侧推靠岸,没有转向功能,无法为前进助力推进,即便家装转向机构,但因转向半径较大,给正常前进造成很大的水组,若转向90
°
,则会造成安装力矩不平衡,主动与静止严重不平衡,可靠性降低,无法主推与侧推兼容。
5.船体横向穿孔侧推,没有转向机构,无法精准靠岸,为了精准靠岸侧推还要启动主推,且无法实施进港斜角最短距离靠岸。
6.船体采用柴油机+轴+螺旋桨推进,属于大型机械结构,耗能高,体积大,更是无法进行直接智能化柔性管理。
7.电机+轴+螺旋桨推进器,和发动机+轴+螺旋桨,都存在密封磨损缺陷,而需要定期维护密封以确保一定时间内的有效耐水深度。
8.直线流体技术,即俗名无轴泵喷推进器技术,最早文献见于2012年11月的专利zl2012104365922一种感应空心螺旋推动装置,从基本原理上公开了本技术的关键特征,但作为水下矢量推进场景,其具体应用的产品技术特征,没有公开显示。
9.本发明型技术是基于直线流体技术,围绕转向不损失、转向灵活、体积较小、重量轻、长寿命、拆装便捷、效率高、潜水更深,适应范围更广、智能化程度最高、产品可制工艺化为主要目标,并从结构特征和智能化特点上进一步公开。
技术实现要素:
10.本发明型技术主要解决水下推进器转向不损失、转向灵活、体积较小、重量轻、长寿命、拆装便捷、效率高、潜水更深,适应范围更广,产品可制工艺化,和深度智能化管理。
11.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、
ꢀ“
厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时 针”、“逆时针”、“轴向”、“径向”、“周向”、“内侧”、“外侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指
的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
12.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相 连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
13.本发明描述中涉及的时间数值,可按照实际需要重新定义,并非特定不变的数值。
14.本发明描述中涉及到名词“水”,包含海水、淡水、河水、江水、湖水。
15.本发明描述中涉及到名词“远程”,包括wifi覆盖范围、gps/北斗通信、5g通信、对讲机低频中波范围。
16.具体如下:一种矢量型无轴泵喷推进器,其特征在于,至少由本体、连杆、转向机、手动操纵组件、天线、驱动器、线束组成,连杆的下端装配本体,连杆上半段装配转向机,转向机装配手动操纵组件,所述本体至少由定子组件和转子组件,且转子组件嵌入在定子组件圆心内部,转子组件位于定子组件的同心圆周内,且转子组件的外壁与定子组件的内壁有一定的径向间隙,转子组件的径向旋转运动是依靠定子组件的电磁力与转子组件的磁力相互作用完成,转子组件的轴向有一定的位移空间,这个位移空间量的最大值由输入口到输出口圆心约束之间距离决定。
17.一种矢量型无轴泵喷推进器的本体,其特征至少包括,定子组件至少包括过滤网、外壳、输入盖、输出盖、前内盖、后内盖、本体接线口、绕组、填充物、铁芯、套筒、衬套、芯杆、导流环,转子组件至少包括转筒、输入螺旋环、输出螺旋环组成,转筒的外壁固定装有感磁/永磁结构,转筒内壁固定装有输入螺旋环和输出螺旋环,输入螺旋环位于转筒输入段,输出螺旋环位于转筒输出段,转筒前后受约于输入盖和输出盖的限制,过滤网与输入盖固定,输入盖与前内盖的一侧固定,前内盖的另一侧与外壳、套筒、后内盖的一侧对接形成密闭的腔体,所述腔体内部有绕组、铁芯、填充物,所述对接方式不限于焊接式、过硬配合式、螺钉锁紧式,芯杆的前后两端分别与输入盖和输出盖固定,芯杆的中间段固定导流环,输入螺旋环和输出螺旋环的圆心分别都有圆孔,芯杆穿过所述两个圆孔,这两个圆孔的孔径大于芯杆直径,套筒材质具有非导磁型和可焊接性,衬套材质具有高硬度、耐水性、耐磨性,后内盖有与本体接线口对接的接口,所有与水接触面都具有耐水结构处理,填充物具有绝缘和可液化性。
18.一种矢量型无轴泵喷推进器的转向机,其特征至少,由底座、电机转子、电机定子和转向机驱动线接口组成,转向机驱动线接口在电机定子的外壁固定,电机转子圆心孔通透,电机转子与芯杆的外壁通过锁定结构进行紧固,底座呈圆筒形,底座内径大于连杆直径,电机定子与底座紧固,底座圆周表面有一层底座外壁,这个底座外壁有上船体固定结构和操作杆固定结构,所述电机的结构属于步进电机结构,转向机水平安装,转向机水平偏转角法线垂直面与本体的输出口水平偏转法线垂直面平行或重合。
19.一种矢量型无轴泵喷推进器的连杆,其特征至少由固定圈、固定套、杆子、防滑槽
面、进线口、本体驱动出线口、转向机驱动出线口、防坠结构组成,杆子呈圆筒形,杆子内部自上而下通透,固定圈紧固在杆子的下端,防坠结构位于杆子顶端,防坠结构与杆子是可拆装方式固定,杆子中下端嵌入在固定套内,且固定套的内孔尺寸能保持杆子径向自由旋转盒上下滑动,固定套的圆周外壁有下船体固定结构,杆子中上段有防滑槽面,防滑槽面至少两个,电机转子的圆周上端有锁定结构,电机转子锁定结构固定在防滑槽面位置,且锁定结构在锁定前,杆子上下可以移动,杆子外径小于转向机的底座内径,杆子高度大于船体侧高,固定圈的内径等于本体外壳外径,固定圈与杆子固定方式至少有焊接式、螺纹式、卡槽式、卡簧式,固定圈与本体固定方式至少是可拆卸方式,有卡槽式、卡扣螺栓式、和助力卡簧式。
20.一种矢量型无轴泵喷推进器的手动操纵组件,其特征至少,由驱动盒、操作面板、固定杆、线束组成,驱动盒由盖子、盒子、电源线接口、出线接口组成,线束至少包括电源线缆、转向机驱动线缆、本体驱动线缆、天线线缆,电源线位于输入接线口,转向机驱动线缆、本体驱动线缆、和天线线缆位于输出接线口,操纵面板在盖子的表面固定,操作面板为透明窗式,盖子在盒子上面,盖子与盒子是可拆式固定,固定杆一端与驱动盒固定,固定杆另一端与转向机固定。
21.一种矢量型无轴泵喷推进器手动操纵组件的固定杆,其特征在于长度大于船体侧面的船舷宽度,或者长度大于人体身体宽度+船尾部的船舷宽度,固定杆有通用安装结构,固定杆与转向机固定方式至少是可拆卸式、螺纹式。
22.一种矢量型无轴泵喷推进器手动操纵结构的操作面板,其特征至少有转向键、启停键、加速键、减速键,转向键有仪表盘特征,转向键操纵左向/右向偏转角度同步等于本体输出口水平左向/右向角度,所述角度都小于等于90
°
,转向键操纵是无级连续调节模式,启停键被触动一下则立即启动,再次触动一下则立即停机,第一次触动启停键与第二次触动的时间小于3秒,则第二次无效输入,加速键被触动一下则增加一级喷水速度,再次被触动一下则再次增加一级喷水速度,持续触动到最高级喷水速度,则不再增加,减速键被触动一下则减少一级喷水速度,再次被触动一下则再次减少一级喷水速度,持续触动到最低级喷水速度,则不再加速。
23.一种矢量型无轴泵喷推进器的驱动器,其特征,在于至少由硬件电路和软件程序组成,硬件电路固定嵌入在驱动盒里面,有完全密闭结构,硬件电路至少包括电源管理电路、输入电路、过压保护电路、cpu电路、输出电路、电流过载保护电路、mosfet/igbt推进驱动电路、转向机驱动电路、传感器电路、输入数字电路、输入模拟电路、报警/蜂鸣电路、显示驱动/扩展电路、数字显示模块、usb接口电路、wifi/蓝牙接口电路、射频电路、显示模块上有加速/减速操作接口,其软件程序构成,至少包括自检程序、自锁程序、复位程序、启停程序、喷水速度调节程序、自动上传报警程序、标准运行程序、转向程序、方向算法程序、刹车程序、时间设置程序、运行数据管理程序、5g远程网络管制中心操控软件、wifi/蓝牙接口程序、手机app管理程序、剩余电量提醒程序、掉电自报警程序、缺水提醒程序、手工/智能操纵选择模式、基本运行安全程序。
24.一种矢量型无轴泵喷推进器的手机app管理程序,其特征不限于,有手机屏幕虚拟操纵面板,有虚拟操纵面板密码保护程序,有手形操纵识别和编码程序,有app管理程序编译协议,有5g远程网络管控与手机操控模式切换程序,有5g远程网络智能管控程序,有运行
状态数据保存程序,有数据查阅程序,有故障提醒报警程序,有手动紧急修复程序,有运行数据记录恢复程序,有被盗自动加密上传后清零程序,有被盗自动锁机程序,有被盗自动定位和报警程序。
25.一种矢量型无轴泵喷推进器的运行数据管理程序,其数据内容不限于,实时校准频次,国际时区,gps/北斗定位信息,水温信息,盐度信息,重力信息,湿度信息,水平信息,指南针实时信息,水压信息,开机时间,停机时间,待机时间,运行速度,每级速度下对应的运行时间,运行偏转角度,偏转时间,低电压运行时间,大电流运行时间,运行中断时间,紧急呼救时间,故障修复时间,过流保护时间,手动操纵/智能操纵模式切换时间,数据自动上传时间,数据自动清零时间。
26.附图说明
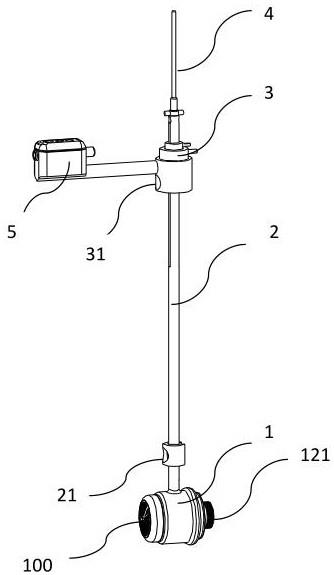
27.图1矢量型无轴泵喷推进器整体示意图1:本体2:连杆3:转向机4:天线5:驱动器31:上船体固定结构210:下船体固定结构100:输入口121:输出口图2矢量型无轴泵喷推进器整体中心切面立体示意图117:输入螺旋环210:下船体固定结构22:杆子23:固定槽面24:进线口25:转向机驱动出线口26:防坠结构27:本体驱动出线口31:上船体固定结构32:底座外壁51:盒子52:盖子55:固定杆图3矢量型无轴泵喷推进器本体轴向中心切面立体示意图101:输入盖102:前内盖
103:绕组104:铁芯22:杆子106:外壳20:锁扣108:后内盖109:输出盖110:本体接线口111:输出螺旋环112:芯杆113:转筒114:套筒115:衬套116:导流环117:感磁/永磁结构118:输入螺旋环119:过滤网图4矢量型无轴泵喷推进器的连杆立体示意图20:锁环21:固定套210:下船体固定结构22:杆子23:防滑槽面24:进线接口25:转向机驱动出线口26:防坠结构27:本体驱动出线口28:固定圈29:天线座图5矢量型无轴泵喷推进器的转向机立体示意图30:底座31:上船体固定结构33:转向机驱动线接口34:杆子锁扣35:电机转子36:电机定子37:操作杆固定结构图6矢量型无轴泵喷推进器的转向机中心轴向切面立体示意图31:上船体固定结构
32:底座外壁33:转向机驱动线接口34:锁定结构35:电机转子36:电机定子55:固定杆22:杆子23:防滑槽面图7 矢量型无轴泵喷推进器的手动操纵组件立体示意图53:电源线接口521:偏转键522:加速键523:减速键524:启停键54 出线接口55:固定杆56:通用安装结构图8矢量型无轴泵喷推进器的电气工作原理框图a1:蓄电池电力模块a2:岸电桩充电模块b:电源管理模块c:中央处理中心cpu模块d1:尾部推进器电力模块g1:尾部推进器转向驱动模块d2:左侧推进器电力模块g2:左侧转向驱动模块d3:右侧推进器电力模块g3:右侧转向驱动模块e1:水压传感器模块e2:水温传感器模块e3:重力传感器模块e4:水平传感器模块e5:盐度传感器模块e6:指南针传感器模块f:信号进出射频处理模块h:操作面板驱动模块
具体实施方式
依照本发明图1矢量型无轴泵喷推进器整体示意图显示,和图2 矢量型无轴泵喷
推进器整体中心切面立体示意图显示,本体(1)沉浸在水下或水面,当驱动器(5)得电启动后,水从本体输入口(100)吸入,从本体输出口(121)喷出,其反作用力迫使本体超输入方向前进,固定套(21)受到连杆(2)下端从本体传递来的反作用力迫使船体按照本体输入口方向前进。
28.本体通过连杆和转向机(3)固定,确保与按照转向机预定的方向同步。
29.通过天线(4)对接驱动器的硬件电路,实现远程无接触的智能化操纵驱动器,从而实现对转向机和本体的操作。
30.通过对操纵面板(52)的操作,对驱动器进行有效设置,然后驱动器安装事先的程序指令对本体和转向机进行目标性驱动运行。
31.依照本发明图图3 矢量型无轴泵喷推进器本体轴向中心切面立体示意图显示,当本体接线口(110)得电后,前端水通过过滤网(119)过滤后被吸入,再通过输入盖(101)的整流,进入输入螺旋环(118),螺旋环旋转加压推进水流进入导流环(116),通过导流环增压后,再进入输出螺旋环(111)加压推进到输出盖(109),输出盖的导流再次增压后快速喷出,从而产生极大的反作用力。
32.当本体接线口得电后,绕组(103)得电,按照驱动器的矢量参数立刻工作,产生旋转电磁场,磁场力穿过套筒(114)与转筒外壁的感磁/永磁结构(117)发生作用,迫使其径向旋转起来,从而带动转筒里面紧固的输入螺旋环和输出螺旋环一起同步转动。
33.为防止水对绕组和铁芯(104)的破坏,采用具有绝缘作用的液态填充物完全包裹工艺,再利用前内盖(102)与外壳(106)、套筒、后内盖(108)形成密闭的腔体进行二次保护,而且在深水区防防止深水压力破坏,前内盖与外壳、套筒、后内盖采取相互焊接工艺,以此而成具有耐高压的密闭腔体,然后再前内盖和后内盖上分别装上具有的整流的输入盖和导流输出盖。
34.采取芯杆(112)在中段位置与导流环(116)的固定,和两端位置与输入盖和输出盖的固定,形成对转子组件的限位作用和流体增压作用,芯杆穿过输入螺旋环和输出螺旋环圆心的圆孔,以保证输入螺旋环和输出螺旋环径向自由转动不受影响,且芯杆通过输入盖与输出盖固定连接,对输入螺旋环和输出螺旋环起到轴向限位作用,与芯杆固定不动的导流环对输入螺旋环增压后的水流起到拟制径向而转轴向的加压作用。
35.本体的定子组件与转子组件是径向同心圆布局,以保证了定子组件的重力和转子组件的重力几何中心重合,既能保证了连杆与其外壳固定后的轴向平衡性,也能保证了本体轴向长度最小,从而达到矢量转向空间最小。
36.依照本发明图5矢量型无轴泵喷推进器的转向机立体示意图,和图6矢量型无轴泵喷推进器的转向机中心轴向切面立体示意图显示,与船体固定不动的上船体固定结构(31)与底座(30)固定不动,即转向机的电机定子(36)与底座(30)固定不动,当驱动器得电启动时,转向机也被同时得电启动,首次启动,默认电机转子(35)转向角0
°
,需要调整时,电机转子才被转向到预定角度。
37.当作尾部单机主推时,转向机的转向角度小于90
°
,以增加了转向的灵活性,高速推进时,驱动器软件程序默认转向角度最大值在25
°
以内,以防止转向角度过大导致侧向力翻船事故发生。
38.当作侧推船体进港靠岸时,转向机的转向角度等于90
°
,以满足船体整体横向移动
靠岸,若航道狭窄需要精准靠岸,则低速前进,转向机转向到从0
°
开始调整,接近岸边前停机即可。
39.依照本发明图2 矢量型无轴泵喷推进器整体中心切面立体示意图显示,依照船体高度确定连杆固定套和转向机的固定高度,当作尾部单机主推时,则依照船尾的船舷高度先确定转向机的水平位置,再确定船体尾部中心受力位置,再将连杆的杆子插入固定套的圆心,和转向机电机转子(35)的圆心内,再装好防坠结构(26),以防止连杆和本体坠落。
40.对水面推进和水下推进事前做好规划后,依照船体高度和水面位置,计算出连杆的杆子(22)与转向机的固定位置,确保杆子的防护槽面与转向机电机转子,用杆子锁扣有效锁紧固定。
41.若小功率本体,则提前手工安装本体与连杆,若大功率,则采用辅助工具安装本体与连杆,安装过程正常。
42.连接所有对应线缆后,进行上电自检,自检通过后,表示安装正常。
43.依照本发明图4矢量型无轴泵喷推进器的连杆立体示意图显示,用固定天线座(29)上的天线伸长,与驱动器进行通讯,当本体采用大功率时,天线座可以拆除,安装到其它合适位置,不在杆子的顶端位置,以提高通信可靠性性。
44.固定圈(28)采用卡簧式安装本体时,依据不同的本体功率实施,当本体是微功率时,较大身体肌肉力,即可张开卡簧实现完全手工安装;当本体较小功率时,用简单助力工具实现手工操作;当本体具有一定的功率体重时,固定圈采用卡扣式安装本体,并确保锁环(20)安装可靠有效。
45.杆子(22)与本体的固定方式是可拆卸式,可实现本体拆机维护和再次更换。
46.固定套(21)的内圈尺寸满足杆子自由转动,可实现杆子与转向机转子和本体的同步转向,上下移动,则可精准定位固定船体。
47.依照本发明图7矢量型无轴泵喷推进器的手动操纵组件立体示意图显示,固定杆(55)的长度取决于连杆与船体的安装位置,和智能操作与手动操作方式。
48.采用天线远程智能操作时,手动操纵组件无需安装在转向机上,可以固定在其它恰当位置,只要连接电缆线束长度足够即可。
49.采用手工操纵组件时,若在船尾,则固定杆长度必须大于船舷宽度+人体宽度,以方便人体面向超前操纵;若在船侧,则固定杆长度大于船舷宽度,方便手工操纵即可。
50.手工操纵时,操纵面板上按键触有不同的定义,不同按键操做的模式不同:转向键(521)操纵是无级连续调节模式,启停键(524)被触动一下则立即启动,再次触动一下则立即停机,第一次触动启停键与第二次触动的时间小于3秒,则第二次无效输入,加速键(522)被触动一下则增加一级喷水速度,再次被触动一下则再次增加一级喷水速度,持续触动到最高级喷水速度,则不再增加,减速键(523)被触动一下则减少一级喷水速度,再次被触动一下则再次减少一级喷水速度,持续触动到最低级喷水速度,则不再加速。
51.在本体特大功率时,驱动器的特大功率igbt器件模组从中分离出来,安装到容易散热位置,操纵面板单独不动,在连杆和本体附近。
52.所有电缆接头采用标准防呆接插件,确保普通用户接插正确。
53.依照本发明图8 矢量型无轴泵喷推进器的电气工作原理示意图显示,当蓄电池电力模块,或者岸电充电模块接通后,电源管理模块即刻得电,即产生工作单元各种需要的低
压直流电源,且正常供电,首次上电,中央处理中心cpu模块开始自检,即确保各个输入和输出单元状态正常,若有接插件开路或异常,或者某单元失效,则自检不通过,自动报警等待处理,若通信单元自检不过,则无法自动上传失效信息,所有单元自检通过后,进入待机状态。
54.待机状态,默认转向角度0
°
,本体转子组件正常,天线通信正常。
55.各种传感器自检后的状态自动储存在中央处理中心cpu模块里面,若水压传感器、水温传感器、水平传感器、盐度传感器参数不满足基本运行安全程序的设定要求,则无法启动,待回复正常后,才可启动。
56.水压传感器代表船体过载与否,水温传感器代表水面结冰与否,盐度传感器代表海岸距离,水平传感器代表船体载货的平衡度,重力传感器、指南针传感器作为位置校准程序参数。所有传感器的安装位置依照现场实际情况安装,并在首次安装后必须进行基础参数调校。
57.完整的电气工作系统输出有三套动力驱动,即左侧驱动、右侧驱动、尾部驱动,全速前进时,三套动力全部打开,若巡航或单机使用时,标准运行程序优先开启尾部驱动,其它设定禁止,若仅侧面推进,则将尾部驱动禁止,若遇到特殊情况,则可手动操纵。
58.自检正常后,中央处理中心cpu模块检测到启动指令,则默认尾部本体驱动电力模块输出,低速运行,左侧/右侧转向指令抵达后,cpu则按照标准运行程序和转向程序发出指令,与之对应的转向机和本体推进器驱动开始输出,即刻进入目标工作状态。
59.操作面板驱动模块,为操作面板提供电源和驱动,为人工操作使用的基础条件,首次上电自检不过,自动上传失效信息报警,默认自动转为无线远程自动操控。
60.采用手机app屏幕虚拟操纵面板,其操纵键定义等于手动操纵,手机与驱动器的连接用无线/蓝牙,或有线连接。
61.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变 都应该属于本发明型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1