一种分体式断级滑行艇的制作方法
1.本实用新型涉及断级滑行艇技术领域,尤其是一种分体式断级滑行艇。
背景技术:
2.高速船舶主要有滑行艇、气垫船、水翼船和地效应船四种船型,它们各有优缺点,其中滑行艇的船体结构和建造工艺在高速船型中最为简单,应用最为广泛。特别是断级滑行艇,在静水中的航行速度较高,稳性也较好,但断级滑行艇也有致命缺点,就是在波浪中的稳性很差,这是限制断级滑行艇实际应用的最主要障碍。能否大幅度提高断级滑行艇在波浪中的稳定性,是扩大其应用范围的关键。
3.早在1995年,e.v.lewis就提出了船舶在波浪中超临界航行的概念。船舶在规则波中迎浪航行,当航速较低,遭遇波浪频率远小于船舶自振固有频率时,为亚临界航行状态;而航速较高,遭遇波浪频率远大于船舶自振固有频率时,为超临界航行状态,上述两种航向状态都可以使船体在波浪中有较小的响应。不规则波可看成无数不同频率微幅子波的叠加,船在迎浪航行时不可避免要与某些子波产生谐振,然而各频率段子波的能量不同,通常波能主要集中在某一较窄的频率段。可以通过使船与波浪的遭遇频率处于远小于或远大于该频率段的办法,来避开与高能量子波的谐摇,前者称为亚临界航行,后者为超临界航行。
4.实践证明,常规排水量船要进入超临界航行十分困难,因为此时要求的航速对排水量船而言过高。只有某些高速驱逐舰在不太大的风浪中(波浪频率较高)航行时才有可能做到,而在大浪中则无法实现,若此时出现大的摇荡,只能通过降低航速进入亚临界航行来改善。某些特种排水量船,如小水线面双体船、穿浪船等,通过减小水线面面积来大幅度减小船的纵摇固有频率,可进入超临界航行状态。
5.滑行艇虽然航速可以很高,在波浪上迎浪航行时有很高的遭遇频率,但与排水量船不同,滑行艇的纵摇固有频率随航速的增加而线性增大,因此通过提高航速来达到超临界航行状态行不通。除非波浪本身的频率很高,但此时对应的波长很短,艇的运动响应本来不大。只有通过特殊手段,使艇的纵向运动固有频率不随航速增长,才有可能使其在中等以上波浪中进入超临界航行,这也正是超临界滑行艇的基本特点。
6.70年代出现的“海刀艇”采用三角形细长滑行面,滑行面的升力主要集中在后部,细长窄小的前部面积变化引起的动升力变化很小,从而明显降低了艇在迎浪航行中的响应强度,自摇频率降低。“海刀艇”是最早出现的超临界滑行艇,耐波性得到显著的改善,尤其在迎浪中的冲击力大大降低。从提高艇的耐波性方面来说,它是成功的。但是细长的艇体带来一系列的问题,如横向稳性,尤其是静浮时的横稳性不足,装载困难,对重心的变化十分敏感等,使其很难进入工程实用。要改变其不足,采用双体是必然的途径。
7.80年代p.r.payne提出了一种名为“游荡者”的双体超临界滑行艇方案,采用细长的前部鸭式板滑行面加尾部水翼的布局方式,设计了一种带槽道的滑行艇方案,据称可以在五级海况下以80kn的速度滑行。遗憾的是这一方案并没有获得成功。美国dtrc对该方案进行评估的结论是:过高地估计了滑行面和尾水翼的升力,过低的槽道又使水流冲刷严重,
使艇无法越出阻力峰值,导致整个方案的失败。
8.虽然,从“海刀艇”到“游荡者”的发展结果是失败的,却给我们一个非常有益的技术启示,就是如果想在滑行艇上实现超临界航行的状态,多体滑行艇方案是很有价值的研究方向。
9.传统的多体船(包括双体船、三体船、四体船和五体船等),其子船体(片体)之间均通过甲板桥刚性连接在一起,因此从本质上说,它们仍属于同一个刚性结构,实为一体船,只是其水线下的湿表面分割为几个独立的区域而已。实验已经证明,无论多体船的船体线型如何变化,都很难在刚性多体船的方案上实现超临界航行的状态。
10.基于上述认识,发明人采取创新思维,综合各种船型技术的优点,在滑行艇、断级滑行艇、超临界滑行艇和多体滑行艇的技术方向上,进行了深入的研究和探索,历经多年的艰苦努力和大量实验,终于另辟蹊径,发明了一种具有多个独立弹性滑行面的分体式断级滑行艇,并取得船模试验和实船试验的成功,获得重大技术突破,成功破解了高速船舶技术领域里的世界难题
11.常规滑行艇的船体底面是一个连贯的表面,依附在船体结构的下方,与甲板平台刚性连接,并非独立存在。航行时,船体底部只有一个支承面,所以无论在静水中或波浪中,船体底面的纵倾角都难以保持控制,船体姿态很不稳定。
12.断级滑行艇的船体底面由前滑行面和后滑行面两部分组成,之间以船体中部的断级为界,前滑行面位于后滑行面前向延长线的下方,之间有高差,前滑行面与后滑行面均依附在同一个船体结构的下方,与甲板平台刚性连接,均非独立存在。航行时,船体底部有二个支承面,所以在静水中,船体底面的纵倾角很稳定,船体姿态也很稳定,但在波浪中,船体的姿态很难保持稳定,适航性很差。
技术实现要素:
13.本技术人针对上述现有技术中的缺点,提供一种结构合理的分体式断级滑行艇,主船体和子船体之间通过减震结构实现连接能够实现纵摇固有频率的大幅度降低,使得船体的波浪遭遇频率很容易超越纵摇固有频率,最终使得滑行艇在静水和大波浪环境下都能够以较好的稳定性实现超高速航行。
14.本实用新型所采用的技术方案如下:
15.一种分体式断级滑行艇,包括主船体,所述主船体纵向前部下方并排设有x个前滑行子船体,主船体纵向后部下方并排设有y个后滑行子船体,x和y为正整数,4≤x+y≤8;
16.所述前滑行子船体底部设有与水面接触的前滑行端面,后滑行子船体底部设有与水面接触的后滑行端面,所述前滑行端面和后滑行端面为平面,并且相互平行设置,前滑行端面和后滑行端面之间有高差h,从而形成滑行艇的断级;
17.所述前滑行子船体和后滑行子船体左右两侧壁互相平行,前滑行子船体和后滑行子船体左右两侧端面垂直向下延伸并分别超出前滑行端面和后滑行端面一定距离,从而在前滑行子船体和后滑行子船体下方形成独立的、前后贯通的槽道;
18.所述前滑行子船体和后滑行子船体上端面前部左右两侧分别通过铰接结构连接主船体底部,并且前滑行子船体和后滑行子船体上端面前部左右两侧的铰接结构位于同一横向轴线上,前滑行子船体和后滑行子船体上端面后部分别通过垂直设置的减震结构连接
主船体底部。
19.进一步的,前滑行端面和后滑行端面为平面,前滑行端面、后滑行端面与水平面呈一纵向夹角a,纵向夹角a的范围为1~10
°
。
20.进一步的,纵向夹角a为4
°
。
21.进一步的,铰接结构包括上铰接支座和下铰接支座,上铰接支座和下铰接支座通过销轴铰接连接,上铰接支座固定在主船体上,下铰接支座固定在前滑行子船体和后滑行子船体上。
22.进一步的,减震结构采用液压阻尼减震弹簧。
23.进一步的,当x=y时,所述前滑行子船体和后滑行子船体沿纵向对齐排列,后滑行子船体尾部设置推进器。
24.进一步的,当x=y+1或y=x+1时,所述前滑行子船体和后滑行子船体沿纵向交叉排列,前滑行子船体尾部设置推进器或/和后滑行子船体尾部设置船舵。
25.进一步的,主船体采用模块化结构,包括z个相互独立的主船体模块,z个主船体模块通过连接件可拆卸的连接成一体,z≥x+y。
26.本实用新型的有益效果如下:
27.本实用新型将主船体的滑行端面设置为多个独立的前后设置的子滑行端面,各个子滑行端面和主船体之间具有一定的弹性缓冲空间,并且主船体和子船体之间的减震结构能够吸收大部分的震动,从而减小了主船体航行时水面对主船体的震动影响;采用铰接结构和减震结构实现主船体与前滑行子船体、后滑行子船体的柔性连接能够大幅度降低主船体的纵摇固有频率,易于实现“超临界航行”状态,也能够大幅度吸收并化解波浪对前滑行子船体、后滑行子船体的冲击力,以柔克刚,提高滑行艇整体的耐波性,并且相应减小汹涛阻力,不在波浪中产生失速现象,从而大幅度提高滑行艇的快速性,实现在波浪中的超高速度;本实用新型的减震结构采用液压阻尼减震弹簧时,通过设置液压阻尼减震弹簧的弹性系数和阻尼系数,能够大幅度降低主船体的纵摇固有频率,使得船体的波浪遭遇频率很容易超越纵摇固有频率,从而实现超临界航行和超高速航行的理想状态;本实用新型子船体的滑行端面和水平面保持一定的纵倾夹角,纵倾夹角的存在使得船体在高速滑行时姿态处于一个非常稳定的状态,航行阻力大大减小,滑行速度能够到达最高100节以上;本实用新型的前滑行子船体和后滑行子船体左右两侧端面垂直向下延伸并分别超出前滑行子船体和后滑行子船体底面一定距离,从而在前滑行子船体和后滑行子船体底部形成纵向贯通的槽道结构,实现稳流功能,从而抑制高速航行时子船体兴起的飞溅和涌流,有效避免子船体之间产生的流体冲击和吸引现象,也大幅度减小了航行阻力;本实用新型的前滑行子船体和后滑行子船体线型和尺寸一致,不仅互换性好,可靠性高,便于实现模块化和标准化的涉及,也能够有效降低生产成本和维护成本;本实用新型模块化结构的主船体便于装入标准集装箱中进行运输和储存。
附图说明
28.图1为本实用新型实施例一主视图。
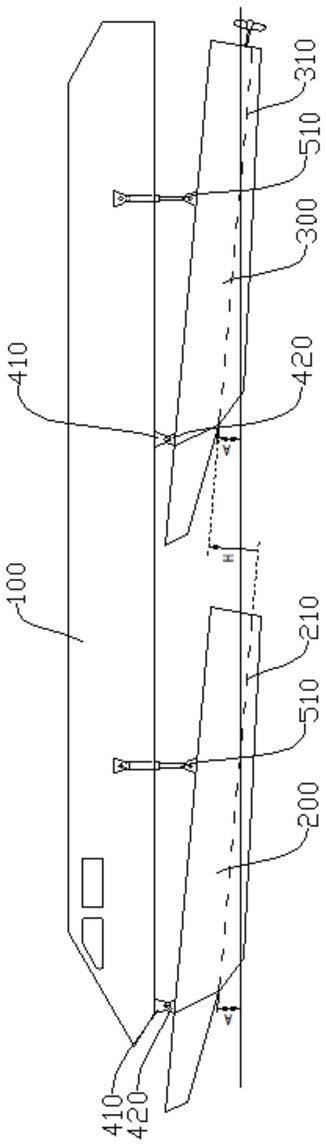
29.图2为本实用新型实施例一侧视图。
30.图3为本实用新型实施例二立体图。
31.图4为本实用新型实施例三立体图。
32.图5为本实用新型实施例四主视图。
33.其中:100、主船体;200、前滑行子船体;210、前滑行端面;300、后滑行子船体;310、后滑行端面;400、铰接结构;410、上铰接支座;420、下铰接支座;500、减震结构;510、液压阻尼减震弹簧;600、推进器。
具体实施方式
34.下面结合附图,说明本实用新型的具体实施方式。
35.如图1和图2所示的实施例一中,本实用新型主要包括主船体100,主船体100纵向前部下方并排设有x个前滑行子船体200,x个前滑行子船体200等距分布。主船体100纵向后部下方并排设有y个后滑行子船体300,y个后滑行子船体300等距分布。x个前滑行子船体200尾部和y个后滑行子船体300头部之间设有间隔,x个前滑行子船体200尾部和y个后滑行子船体300头部之间形成断级。在航行时,前滑行子船体200和后滑行子船体300吃水,主船体100悬空于水面之上不吃水。
36.如图1和图2所示的实施例一中,前滑行子船体200底部设有与水面接触的前滑行端面210,前滑行端面210为平面。后滑行子船体300底部设有与水面接触的后滑行端面310,后滑行端面310为平面。前滑行端面210和后滑行端面310相互平行,前滑行端面210和后滑行端面310之间有高差h,从而形成滑行艇的断级。
37.为了让前滑行子船体200和后滑行子船体300滑行时保持稳定姿态,前滑行端面210、后滑行端面310与水平面呈一纵向夹角a,纵向夹角a的范围为1~10
°
。
38.在纵向夹角a为4
°
时,船体姿态处于最稳定状态,航行阻力最小,滑行速度最高。
39.如图1和图2所示的实施例一中,前滑行子船体200和后滑行子船体300左右两侧端面互相平行,前滑行子船体200和后滑行子船体300左右两侧壁垂直向下延伸并分别超出前滑行端面210和后滑行端面310一定距离,从而在前滑行子船体200和后滑行子船体300下方形成独立的、前后贯通的槽道,槽道实现稳流功能,从而抑制高速航行时子船体兴起的飞溅和涌流,有效避免子船体之间产生的流体冲击和吸引现象,也大幅度减小了航行阻力。
40.在实施例一中,前滑行子船体200和后滑行子船体300线型和尺寸一致,不仅互换性好,可靠性高,便于实现模块化和标准化的涉及,也能够有效降低生产成本和维护成本。
41.在实施例一中,相当于把完整的断级滑行艇的船体底面沿横向断级线分成前后两个滑行面,同时,又将前滑行面横向等距分隔成x个前子滑行面,将后滑行面横向等距分隔成y个后子滑行面,将现有技术中连成一体的滑行端面分割成几个各自独立的子滑行面。
42.如图1和图2所示的实施例一中,前滑行子船体200和后滑行子船体300上端面前部左右两侧分别通过铰接结构400连接主船体100底部,并且前滑行子船体200和后滑行子船体300上端面前部左右两侧的铰接结构400位于同一横向轴线上,前滑行子船体200和后滑行子船体300上端面后部分别通过垂直设置的具有弹性的减震结构500连接主船体100底部,由减震结构500支撑主船体100的重量,从而减小航行时由前滑行子船体200和后滑行子船体300传递到主船体100的震动,提高主船体100的稳定性。
43.实施例一中采用铰接结构400和减震结构500实现主船体100与前滑行子船体200、后滑行子船体300的柔性连接能够大幅度降低主船体100的纵摇固有频率,易于实现超临界
航行状态,也能够大幅度吸收并化解波浪对前滑行子船体200、后滑行子船体300的冲击力,以柔克刚,提高滑行艇整体的耐波性,并且相应减小汹涛阻力,不在波浪中产生失速现象,从而大幅度提高滑行艇的快速性,实现在波浪中的超高速度(≥80节)。
44.在滑行时,前滑行子船体200和后滑行子船体300能够以铰接结构400为轴心,在夹角a范围内,艉部能够实现在垂向上的起伏运动,子船体艉部的垂向行程l,即为子船体翻越波浪时的高度差。所以,子船体的长度越长,子船体艉部的垂向行程l越大,代表其耐波性越好。
45.如同汽车减震技术一样,簧下质量是涉及减震效果的重要指标,簧下质量越小,减震效果越好。本实用新型的主船体100与前滑行子船体200、后滑行子船体300采用的柔性连接方式,子船体的前半段被铰接结构限定位置,只有后半段响应起伏运动,也就是其簧下质量只有子船体重量的一半,波浪冲击只涉及子船体重量的一半,所以本实用新型的簧下质量很低,减震效果很好。
46.如图1所示的实施例一中,铰接结构400包括上铰接支座410和下铰接支座420,上铰接支座410和下铰接支座420通过销轴铰接连接,上铰接支座410固定在主船体100上,下铰接支座420固定在前滑行子船体200和后滑行子船体300上。
47.如图1所示的实施例一中,减震结构500采用液压阻尼减震弹簧510,通过设置液压阻尼减震弹簧510的弹性系数和阻尼系数,能够大幅度降低主船体100的纵摇固有频率,使得船体的波浪遭遇频率很容易超越纵摇固有频率,从而实现超临界航行和超高速航行的理想状态。
48.前滑行子船体200为x个,后滑行子船体300为y个,4≤x+y≤8,x和y为正整数,在该范围内,能够取得最优的使用滑行效果,成本也较低。
49.如图3所示的实施例二中,前滑行子船体200和后滑行子船体300均为两个,两个后滑行子船体300尾部设有推进器600。
50.如图4所示的实施例三中,前滑行子船体200为三个,三前滑行子船体200尾部设有推进器600,后滑行子船体300为两个,两个后滑行子船体300尾部设有船舵700。
51.综上表述,当x=y时,前滑行子船体200和后滑行子船体300沿纵向对齐排列,前滑行子船体200尾部不设置推进器600,后滑行子船体300尾部设置推进器600。
52.当x=y+1或y=x+1时,前滑行子船体200和后滑行子船体300沿纵向交叉排列,前滑行子船体200尾部设置推进器600或/和后滑行子船体300尾部设置推进器600。
53.如图5所示的实施例四中,主船体100采用模块化结构,包括z个相互独立的主船体模块110,z个主船体模块110通过连接件可拆卸的连接成一体。z≥x+y,模块化结构的主船体100便于装入标准集装箱中进行运输和储存。
54.本实用新型将主船体的滑行端面设置为多个独立的前后设置的子滑行端面,各个子滑行端面和主船体之间具有一定的震动调节空间,并且主船体和子船体之间的减震结构能够吸收大部分的震动,从而减小了主船体航行时水面对主船体的震动影响;采用铰接结构和减震结构实现主船体与前滑行子船体、后滑行子船体的柔性连接能够大幅度降低主船体的纵摇固有频率,易于实现“超临界航行”状态,也能够大幅度吸收并化解波浪对前滑行子船体、后滑行子船体的冲击力,以柔克刚,提高滑行艇整体的耐波性,并且相应减小汹涛阻力,不在波浪中产生失速现象,从而大幅度提高滑行艇的快速性,实现在波浪中的超高速
度;本实用新型的减震结构采用液压阻尼减震弹簧时,通过设置液压阻尼减震弹簧的弹性系数和阻尼系数,能够大幅度降低主船体的纵摇固有频率,使得船体的波浪遭遇频率很容易超越纵摇固有频率,从而实现超临界航行和超高速航行的理想状态;本实用新型子船体的滑行端面和水平面保持一定的纵倾夹角,纵倾夹角的存在使得船体在高速滑行时姿态处于一个非常稳定的状态,航行阻力大大减小,滑行速度能够到达最高100节以上;本实用新型的前滑行子船体和后滑行子船体左右两侧端面垂直向下延伸并分别超出前滑行子船体和后滑行子船体底面一定距离,从而在前滑行子船体和后滑行子船体底部形成纵向贯通的槽道结构,实现稳流功能,从而抑制高速航行时子船体兴起的飞溅和涌流,有效避免子船体之间产生的流体冲击和吸引现象,也大幅度减小了航行阻力;本实用新型的前滑行子船体和后滑行子船体线型和尺寸一致,不仅互换性好,可靠性高,便于实现模块化和标准化的涉及,也能够有效降低生产成本和维护成本;本实用新型模块化结构的主船体便于装入标准集装箱中进行运输和储存。
55.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1