一种适用于无人机的停靠充电系统
1.本实用新型涉及无人机技术领域,具体的涉及一种适用于无人机的停靠充电系统。
背景技术:
2.随着人们科技水平的逐步提高,无人机的应用场景越来越广泛,伴随而来的是无人机充电问题,无线充电的实用性较强,可是无线充电装置的充电范围是有限的,并且无人机如果想实现精准的停靠到无线充电范围内对于操作水平要求较高,于是在此为了解决此问题提出了一种解决方案。
技术实现要素:
3.为了能降低实现精准停靠的操作要求,本实用新型采取的技术方案是提供一种适用于无人机的停靠充电系统。
4.为了能实现降低精准停靠难度,本实用新型提供的技术方案为:一种适用于无人机的停靠充电系统。
5.所述系统包括:停靠模块、调整模块、充电模块和控制模块,所述停靠模块由多组弹性绳索和若干支柱构成,该弹性绳索应有一定的张力以实现无人机的平稳着陆,并有一定的密度导致无人机不倒,弹性绳索还有一定的摩擦力供爬绳电机工作;所述调整模块,由多个爬绳电机和挡板构成,用于找到无人机停靠的位置,并调整无人机至无线充电范围内;所述控制模块,由主控设备和外围电路构成,用于控制爬绳电机工作;所述充电模块,包含有无线充电装置,用于对无人机充电。
6.进一步地,所述弹性绳索的终端设置有张力传感器,所述张力传感器检测弹性绳索的张力信息,并将所述张力信息发送至所述控制模块,所述控制模块根据所述张力信息判断是否有无人机停靠;具体为:
7.所述张力信息大于或者等于预设阈值时,判断为有无人机停靠;否则,判断为无无人机停靠。
8.当判断有无人机停靠时,控制模块的主控设备调整到自动调整模式时,爬绳电机自发运动,爬绳电机由弹性绳索的边缘位置向中心位置运动,当爬绳电机碰到无人机机体时,爬绳电机向主控设备反馈此时的位置,主控设备规划对应的爬绳电机的运动路径,并控制对应的爬绳电机按照所述运动路径将无人机调整到无线充电范围内,其他未碰到无人机机体的爬绳电机重新返回无线充电装置的边缘位置。
9.进一步地,爬绳电机在调整无人机运动的过程中,不停地向主控设备反馈实时位置,所述实时位置的获取是通过在爬绳电机滚轮处添加霍尔传感器,记录滚轮的运动路径,从而推算出爬绳电机和无人机的具体位置。
10.进一步地,当爬绳电机反馈的位置是弹性绳索的中心,说明成功调整无人机到无线充电范围内,此时充电模块开始对无人机充电。
11.进一步地,当开始充电时,主控设备中的定时器开始计时,当计时超过预设值后,主控设备控制充电模块停止对无人机充电,防止对电池的过充电,从而达到保护电池的目的
12.所述方法具体包括以下步骤:
13.s1、主控模块的主控设备根据张力传感器获取的弹性绳索的张力信息判断是否有无人机停靠;若是,则到s2;否则,返回s1继续监测;
14.s2、主控设备控制调整模块的爬绳电机由弹性绳索的边缘位置向中心位置运动,直至碰到无人机机体;
15.s3、所述爬绳电机向主控设备反馈无人机机体的位置;
16.s4、主控设备根据所述反馈的位置规划爬绳电机的运动路径;
17.s5、主控设备控制爬绳电机按照所述规划的运动路径将无人机调整至无线充电范围内;
18.s6、充电模块对无人机充电,主控设备的定时器开始计时,当计时超过预设值时,进入s7;
19.s7、结束充电。
20.为了防止出现意外情况,主控设备有停止功能,当切换到停止状态时,爬升电机断电停止工作。
21.在以上的整个过程中,主控设备接受外界的控制,当收到停止信号后,电机立即停止工作,另外、如果无线充电装置正在工作也可停止工作。
22.本实用新型提供的技术方案带来的有益效果是:本实用新型提供的一种适用于无人机的停靠充电系统,包括停靠模块、调整模块、充电模块和控制模块,各模块之间相互联系,可以降低无人机停靠充电操作难度,进而可以实现更精准的停靠与充电,此外,控制模块与外界控制界面连接,可以人为控制,防止出现意外情况。
附图说明
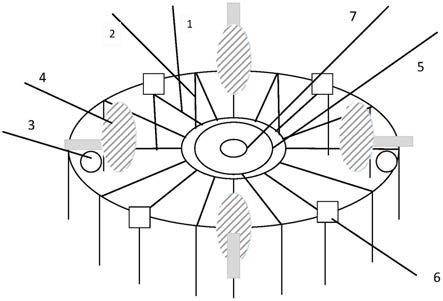
23.图1是本实用新型的无人机技术领域的停靠充电系统的结构示意图;
24.图2是本实用新型的控制模块与绳索压力传感器、爬绳电机和控制界面的连接示意图。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
26.请参考图1、图1是本实用新型的无人机技术领域的停靠充电系统的结构示意图。
27.本实用新型实施例提供的一种适用于无人机的停靠充电系统,包括停靠模块、调整模块、充电模块和控制模块;
28.所述停靠模块由多组弹性绳索1和支柱2构成,该弹性绳索1应有一定的张力以实现无人机的平稳着陆,并有一定的密度导致无人机不倒,弹性绳索1还有一定的摩擦力供爬绳电机3工作;所述调整模块,由多个爬绳电机3和挡板4构成,用于找到无人机停靠的位置,并调整无人机至无线充电范围内;所述控制模块,由主控设备7和外围电路构成,用于控制
爬绳电机3工作;所述充电模块,包含有无线充电装置5,用于对无人机充电。
29.进一步地,所述弹性绳索的终端设置有张力传感器6,所述张力传感器6检测弹性绳索1的张力信息,并将所述张力信息发送至所述控制模块,所述控制模块根据所述张力信息判断是否有无人机停靠;具体为:
30.所述张力信息大于或者等于预设阈值时,判断为有无人机停靠;否则,判断为无无人机停靠。
31.当判断有无人机停靠时,控制模块的主控设备7调整到自动调整模式时,爬绳电机3自发运动,爬绳电机3由弹性绳索1的边缘位置向中心位置运动,当爬绳电机3碰到无人机机体时,爬绳电机3向主控设备7反馈此时的位置,主控设备7规划对应的爬绳电机3的运动路径,并控制对应的爬绳电机3按照所述运动路径将无人机调整到无线充电范围内,其他的爬绳电机3重新返回无线充电装置5的边缘位置。
32.爬绳电机3在调整无人机运动的过程中,不停地向主控设备7反馈实时位置,所述实时位置的获取是通过在爬绳电机3的滚轮处添加霍尔传感器,记录滚轮的运动路径,从而推算出爬绳电机3和无人机的具体位置。
33.当爬绳电机3反馈的位置是弹性绳索的中心,说明爬绳电机3已成功调整无人机到无线充电范围内,此时充电模块开始对无人机充电。
34.当开始充电时,主控设备7中的定时器开始计时,当计时超过预设值后,主控设备7控制充电模块停止对无人机充电,防止对电池的过充电,从而达到保护电池的目的。
35.一种适用于无人机的停靠充电方法应用于所述一种适用于无人机的停靠充电系统,具体包括以下步骤:
36.s1、主控模块的主控设备7根据张力传感器6获取的弹性绳索1 的张力信息判断是否有无人机停靠;若是,则到s2;否则,返回s1 继续监测;
37.s2、主控设备7控制调整模块的爬绳电机3由弹性绳索1的边缘位置向中心位置运动,直至碰到无人机机体;
38.s3、所述爬绳电机3向主控设备7反馈无人机机体的位置;
39.s4、主控设备7根据所述反馈的位置规划爬绳电机3的运动路径;
40.s5、主控设备7控制爬绳电机3按照所述规划的运动路径将无人机调整至无线充电范围内;
41.s6、充电模块对无人机充电,主控设备7的定时器开始计时,当计时超过预设值时,进入s7;
42.s7、结束充电。
43.此外,为了防止出现意外情况,主控设备7有停止功能,当切换到停止状态时,爬升电机3断电停止工作。
44.请参考图2,图2是本实用新型的控制模块与绳索压力传感器、爬绳电机和控制界面的连接示意图。
45.当张力传感器6感知到张力变化时,会将张力信息发送到主控设备7,主控设备7根据接收到的张力信息判断有无人机停靠,此时,主控设备7控制爬绳电机3开始由弹性绳索1的边缘位置向中心位置运动;
46.当爬绳电机3碰到无人机机体时,爬绳电机3向主控设备7反馈此时的位置,主控设
备7规划所述爬绳电机3的运动路径,并控制所述爬绳电机3按照所述运动路径将无人机调整到无线充电范围内,未碰到无人机机体的爬绳电机3重新返回无线充电装置5的边缘位置。
47.主控设备7还与外界的控制界面连接,当发生突发情况时,可以立即通过控制界面输入停止信号,主控设备7控制爬绳电机3立即停止工作。
48.本实用新型有益效果是:本实用新型提供的一种适用于无人机的停靠充电系统,包括停靠模块、调整模块、充电模块和控制模块,各模块之间相互联系,可以降低无人机停靠充电操作难度,进而可以实现更精准的停靠与充电,此外,控制模块与外界控制界面连接,可以人为控制,防止出现意外情况。
49.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1