一种装有笼箱式传送装置的无人机
1.本实用新型属于无人机技术领域,尤其涉及一种装有笼箱式传送装置的无人机。
背景技术:
2.目前,随着无人机技术的日益成熟,无人机被广泛应用于生活的各个领域。由于无人机效率高、成本低,可以取代人工作业,市场潜力大,已逐渐成为一个研究热点。目前物流技术以及智能制造行业的快速发展对运输的要求日益增多。无人机技术的发展在一定程度上可以缓解这一问题,降低人力物力在运输过程中的消耗。
3.现有技术中无人机运输设备主要有夹手式和笼箱式两种,现有技术公开了申请号2015204410389.2的一种物流运输无人机,能有效地利用无人机运输物品,改善了物品运输效果,但是需要人手动将物品放入笼箱中,必须通过人力参与,无法应用于工业流水线中。
4.由此,本实用新型提出一种装有笼箱式运输装置的无人机,以解决上述问题。
技术实现要素:
5.本实用新型所要解决的技术问题是针对背景技术的不足提供了一种装有笼箱式传送装置的无人机,以解决在智能制造流水线以及物流配送等行业中需要大量人力运输的问题。
6.本实用新型为解决上述技术问题采用以下技术方案:
7.一种装有笼箱式传送装置的无人机,包括带有gps模块的无人机本体,所述无人机本体内设置有控制模块,所述控制模块上连接有激光雷达;
8.所述无人机本体的底部设置有笼箱式存储箱,所述笼箱式存储箱箱体内底部设置有内传送带,所述笼箱式存储箱位于传送带输入端和输出端的侧壁均设有侧门,所述侧门也为传送带结构,侧门的底部铰接在笼箱式存储箱门框底部且其铰接处设置有转动电机,侧门绕其铰接点转动至水平状态时,其与内传送带位于同一水平面;所述笼箱式存储箱内设置有计数器;内传送带的驱动电机、侧门的传送带驱动电机、侧门的转动电机和计数器均与控制模块连接。
9.进一步的,所述笼箱式存储箱底部四角设置有滚轮并连接有驱动电机,驱动电机与控制器连接。
10.进一步的,所述滚轮上套设有缓冲垫。
11.进一步的,所述计数器选用遮光式红外计数器。
12.本实用新型采用以上技术方案与现有技术相比,具有以下技术效果:
13.该设备由于其自主性,可自行设计程序控制无人机、笼箱式存储箱工作,能够有效解决运输行业中人力消耗大的问题,该设备可以广泛地应用于工业流水线中,如设备加工厂、制药厂、物流中心等场合。同时,由于其能够在空中飞行,可以将物品送至较高处,可以改进传统工业流水线的设计方案,应用于更为节省空间的制造流程。
附图说明
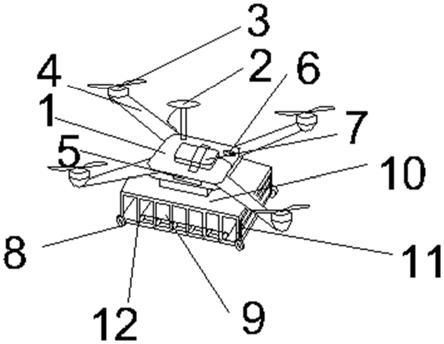
14.图1是本实用新型整体结构示意图。
15.图2是本实用新型传递物品工作示意图。
16.图中:1、无人机本体;2、gps模块;3、扇叶;4、扇叶支架;5、控制模块;6、激光雷达;7、电池;8、滚轮;9、内传送带;10、笼箱式存储箱;11、侧门;12、辊轴;13、流水线传送带;14、待传送物品;15、缓冲垫;16、遮光式红外计数器。
具体实施方式
17.下面结合附图对本实用新型的技术方案做进一步的详细说明:
18.如图1和图2所示,本实用新型的具体技术方案是:一种装有笼箱式传送装置的无人机,包括带有gps模块2的无人机本体1,所述无人机本体1内设置有控制模块5,所述控制模块5上连接有激光雷达6;所述无人机本体1的底部设置有笼箱式存储箱10,所述笼箱式存储箱10箱体内底部设置有内传送带9,所述笼箱式存储箱10位于传送带输入端和输出端的侧壁均设有侧门11,所述侧门11也为传送带结构,侧门11的底部铰接在笼箱式存储箱10门框底部且其铰接处设置有转动电机,侧门11绕其铰接点转动至水平状态时,其与内传送带位于同一水平面;所述笼箱式存储箱10内设置有计数器;内传送带9的驱动电机、侧门11的传送带驱动电机、侧门11的转动电机和计数器均与控制模块5连接。所述笼箱式存储箱10底部四角设置有滚轮8并连接有驱动电机,驱动电机与控制器连接。所述滚轮8上套设有缓冲垫15。所述计数器选用遮光式红外计数器16。
19.具体的,所述无人机本体1四周安装扇叶支架4,在支架4上安装扇叶3。无人机本体1与下方的笼箱式存储箱10固接。gps模块2、激光雷达6、电池7安装于无人机本体1顶部,控制模块5安装于无人机本体1内部,由电源7向gps模块2、扇叶3的无刷电机、控制模块5、激光雷达6供电,控制模块5采用51系列单片机控制器,负责控制无人机的飞行,可以实现避障、驻停、定向巡航等无人机基础功能,还可以控制笼箱式存储箱10的工作,包括侧门11的开关、传送带9辊轴12的转动、滚轮8的转动等。
20.本实用新型所述笼箱式存储箱10包括两个侧门11,侧门11中和内传送带中均设置有若干个辊轴12。笼箱式存储箱10整体采用钛合金材料制造,由于其密度低、强度高、抗腐蚀性能好等特性,可以保证所存储物品的安全。侧门11由转动电机驱动打开或者关闭,打开角度范围是0
°
~90
°
(即竖直方向和水平方向之间),侧门11打开为0
°
时,处于关闭状态;当侧门11打开至90
°
后,侧门11与内传送带处于同一水平面,并且所有的辊轴12共面。在侧门11底部安装遮光式红外计数器16。笼箱式存储箱10底面四个角分别设置有滚轮8,滚轮8外部均通过粘胶粘贴缓冲垫15,且缓冲垫15采用海绵材质。滚轮上可安装驱动电机并与控制器连接,可受控制牵引整个无人机在水平地面上移动,增加陆地运输功能。
21.具体的,本实用新型在使用的过程中,无人机通过控制模块5进行控制操作,通过控制扇叶3的旋转,达到驻停、定向巡航等控制操作。飞行过程中,激光雷达6工作,扫描周围环境,将信息传输给控制模块5,必要时由控制模块5做出避障指令,实现无人机避障功能。无人机停止在水平地面上时,可由控制模块5向滚轮8的驱动电机转动控制指令,实现机载小车运动功能。笼箱式存储箱10内部辊轴12、侧门11开关电机均由控制模块5控制工作。侧门11底部的遮光式红外摄像头16可向控制模块5传递计数信息,由此判断待传送物品是否
已装入笼箱式存储箱10中。
22.具体的,本实施例中,运输装置的工作流程如下:
23.首先,外部的流水线传送带13将带传送物品送至流水线传送带13的输出端,无人机由控制装置控制到达目标地点,悬停于空中或静止于地面,缓缓打开侧门11。
24.其次,当图中右侧侧门11打开角度为90
°
时与流水线传送带对接并处于同一水平面,启动电机驱动辊轴12带动内传送带9工作,将待传送物品14缓慢传送至笼箱式存储箱10内部,当遮光式红外计数器16提示控制模块5计数加一后,此时物品已被存放进笼箱式存储箱10中,此时缓慢关闭侧门11。至侧门11完全关闭后,无人机开始巡航,将物品运送至指定地点。
25.最后,到目标地点后,缓慢打开图中左侧的侧门11,电机驱动辊轴12以向外传送物品。直至物品被完全送出后,无人机关闭侧门11,执行下一次传送任务。
26.该设备由于其自主性,可自行设计程序控制无人机、笼箱式存储箱工作,能够有效解决运输行业中人力消耗大的问题,该设备可以广泛地应用于工业流水线中,如设备加工厂、制药厂、物流中心等场合。同时,由于其能够在空中飞行,可以将物品送至较高处,可以改进传统工业流水线的设计方案,应用于更为节省空间的制造流程。
27.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
28.以上实施例仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型保护范围之内。上面对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以再不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1