一种主被动组合悬挂式双层运动平台及使用方法
1.本发明涉及一种主被动组合悬挂式双层运动平台及使用方法,属于地面微重力模拟试验技术领域。
背景技术:
2.随着航天器编队技术的发展,星座、集群等概念落地应用,为了验证编队任务中的控制算法、可靠性、寿命等,当前地面模拟试验系统多为单一目标模拟,无法满足编队任务的使用需求。因而,开展多航天器的地面模拟试验系统研发尤为重要。
3.由于航天器的成本较高,试验失败的损失较大,特别是对于多航天器编队任务,在地面上进行尽可能多的模拟试验是任务成功的基本保障。目前,开展地面模拟实验的方式可大致分为悬吊式和托举式两类,悬吊式利用倒置移动装置跟踪载荷运动;托举式应用气浮技术等托举载荷进行跟踪运动。相比托举式,悬吊式的运动行程更大,使用更加简单方便。此外,航天器编队任务中经常出现的交错运动状态,托举式也很难实现。
4.如果仅采用离散式悬挂方案,在发生交错运动时存在部分区域不可达问题,无法使吊点始终处于载荷正上方,难以进行连续运动。
5.为解决多航天器编队技术在地面进行实验模拟的实际问题,对可连续运动的、高精度、高普适性的地面模拟试验系统提出了新需求。
技术实现要素:
6.本发明的目的在于提出一种主被动组合悬挂式双层运动平台及使用方法,以解决现有技术中存在的问题。
7.一种主被动组合悬挂式双层运动平台,主被动组合悬挂式双层运动平台包括主动运动系统、连接杆、被动运动系统和载荷,被动运动轴承通过连接杆固定连接于主动运动系统的下方,载荷悬吊在被动运动系统下方。
8.进一步的,主动运动系统包括支撑块和两向运动器,支撑块固定安装在龙门架的下表面形成轨道,两向运动器滑动连接于支撑块形成的轨道内,两向运动器下方通过连接杆连接被动运动系统。
9.进一步的,两向运动器包括四个两向运动单元,四个两向运动单元通过连接杆共同连接被动运动系统,四个两向运动单元共同运动。
10.进一步的,被动运动系统包括横向导向杆、横向气浮轴承、连接套、纵向导向杆、纵向气浮轴承、连接块和承重板,纵向导向杆通过连接套连接横向气浮轴承,横向气浮轴承套接在横向导向杆上,导向杆的两端连接连接杆的下端,纵向气浮轴承套接在纵向导向杆上,承重板通过连接块固定安装于纵向气浮轴承上。
11.进一步的,载荷悬吊于承重板的下方。
12.进一步的,被动运动系统用于提供在行程范围内的被动运动,被动跟踪载荷的位置,使得载荷的悬挂点始终处于载荷的正上方。
13.一种主被动组合悬挂式双层运动平台的使用方法,应用于上述的一种主被动组合悬挂式双层运动平台,当接到地面模拟任务后,首先进行主动运动系统中支撑块的位置及姿态放置和平整度调试,通过支撑块形成轨道,使得两向运动单元在支撑块的支撑和导向下进行主动运动,进而安装并调整被动运动系统的水平度;
14.而后,将需要进行地面模拟的设备替换载荷的位置,悬吊在平台下方;
15.然后,接受外部测量系统反馈的载荷实时位置,驱动主动运动系统运动,使得需要进行地面模拟的设备处于被动运动系统可适应的范围内;
16.接着,在重力分力的作用下,被动运动系统的纵向气浮轴承沿着纵向导向杆滑动,横向气浮轴承沿着横向导向杆滑动,在承重板上的悬挂点进一步向需要进行地面模拟的设备的正上方靠近,直至重力分力不足以克服摩擦进行运动为止。
17.本发明的有以下优点:本发明提出的一种主被动组合悬挂式双层运动平台及使用方法相对现有技术存在如下有益效果:
18.(1)适用范围广,普适性强,悬吊接口通用,可悬吊绝大部分中小型航天器进行二维运动学地面模拟试验。
19.(2)精度更高,利用主被动运动系统结合的方式,主动运动系统负责大范围机动,被动运动系统适应小范围运动,两级运动使得精度更高。
20.(3)连续运动,通过主被动双层平台可以增大悬吊位置范围,特别是对于两平台交错运动情况,能够通过范围交集区域进行连续运动。
附图说明
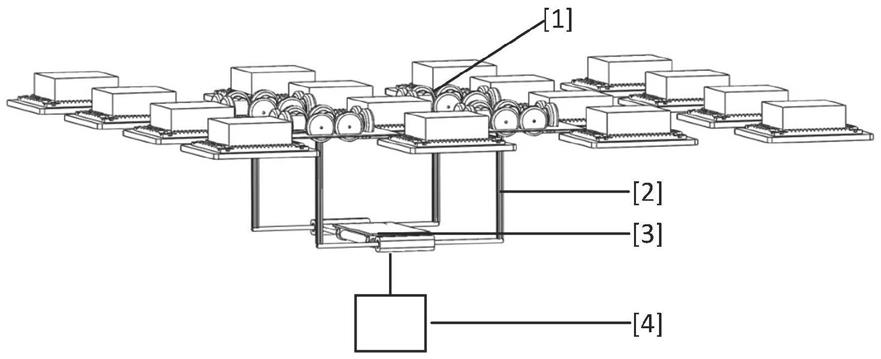
21.图1为本发明的一种主被动组合悬挂式双层运动平台的结构示意图;
22.图2为主动运动系统的结构示意图;
23.图3为被动运动系统的结构示意图;
24.图4为主被动组合悬挂式双层运动平台的悬挂点可达范围图;
25.图5为交错式运动过程示意图,其中,图5(a)为运动过程第一步、图5(b)为运动过程第二步、图5(c)为运动过程第三、图5(d)为运动过程第四步、图5(e)为运动过程第五步。
26.其中,1为主动运动系统、2为连接杆、3为被动运动系统、4为载荷、5为支撑块、6为两向运动器、7为横向导向杆、8为横向气浮轴承、9为连接套、10为纵向导向杆、11为纵向气浮轴承、12为连接块、13为承重板。
具体实施方式
27.下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.参照图1所示,本发明提出了一种主被动组合悬挂式双层运动平台,主被动组合悬挂式双层运动平台包括主动运动系统1、连接杆2、被动运动系统3和载荷4,被动运动轴承3通过连接杆2固定连接于主动运动系统1的下方,载荷4悬吊在被动运动系统3下方。各部分协同工作,共同为航天器载荷提供悬挂式跟踪可交错的连续二维运动地面模拟平台。
29.进一步的,主动运动系统1包括支撑块5和两向运动器6,支撑块5固定安装在龙门架的下表面形成轨道,两向运动器6滑动连接于支撑块5形成的轨道内,两向运动器6下方通过连接杆2连接被动运动系统3。
30.具体的,主动运动系统1主动进行大范围离散运动,可以实现交错运动,参见图2。所述主动运动系统1包含若干支撑块5和四个两向运动器6;支撑块5选用永磁体吸附的形式与固定支架连接,为两向运动器6提供运动支撑和运动导向。四个两向运动单元6呈四边形布局,由连接杆2连接在一起。两向运动器6采用多个电机驱动形式,每个两向运动器6悬吊可承重100kg,因此主动运动系统可承载400kg,除去被动运动系统及连接杆等结构质量,可承载载荷不小于200kg。
31.进一步的,两向运动器6包括四个两向运动单元,四个两向运动单元通过连接杆2共同连接被动运动系统3,四个两向运动单元共同运动。
32.具体的,两向运动器6由四个两向运动单元组成,可以在支撑块5的支撑和导向下完成二维主动运动。每个两向运动器6包含电机、轮子、控制系统等,受控制系统的指令驱动电机带动轮子进行两向运动。
33.进一步的,参照图3所示,被动运动系统3包括横向导向杆7、横向气浮轴承8、连接套9、纵向导向杆10、纵向气浮轴承11、连接块12和承重板13,纵向导向杆10通过连接套9连接横向气浮轴承8,横向气浮轴承8套接在横向导向杆7上,导向杆7的两端连接连接杆2的下端,纵向气浮轴承11套接在纵向导向杆10上,承重板13通过连接块12固定安装于纵向气浮轴承11上。
34.具体的,被动运动系统3能够进行小范围被动适应运动,使得交错运动发生时悬吊点在主动运动范围外的情况下依旧可以保证运动连续。
35.当悬吊点不处于载荷4正上方时,重力会在水平方向上产生分力。在重力分力的作用下,气浮轴承能够在气浮导轨上进行滑动,使得被动运动系统3在行程范围内被动跟踪载荷位置,直至重力分力无法抵消摩擦力进行运动,使得悬挂点尽可能位于载荷4的正上方,进一步提高二维跟踪的精度,为微重力模拟提供基础。
36.此外,在出现两载荷交错运动时,仅仅依靠主动运动系统1完成跟踪由于尺寸干涉会导致有部分区域无法到达,发生运动间断现象;通过被动运动系统3提供的小范围被动适应,能够进一步增加运动范围,弥补交错运动的不可达区域,保证运动连续。主动运动系统1和被动运动系统3两级平台联合工作,能够共同提供平移、交错等形式的连续运动。
37.参见图4,每套主被动组合悬挂式双层运动平台的载荷外包络可达范围如虚线所示,载荷外包络超过主动运动平台的投影区域,且两套相邻运动平台存在包络交集。只采用主动运动平台仅能够提供单点固定的悬吊位置,由于主动运动系统1存在包络尺寸,且很可能小于载荷包络尺寸,造成载荷外包络的可大范围小于上方主动运动系统1的外包络,当主动运动系统1发生运动交错运动时,由于外包络干涉会导致区域不可达情况。被动运动系统3可以让悬吊点一定范围内任意位置移动,运动范围为二维气浮导轨包络的区域内,与主动运动系统的投影面积相当,当悬吊点运动到投影区域边缘时,载荷的外包络超出投影区域,因而,两套平台的可达范围存在交集,使得交错运动时可以保证运动连续。
38.进一步的,载荷4悬吊于承重板13的下方。
39.进一步的,被动运动系统3用于提供在行程范围内的被动运动,被动跟踪载荷4的
位置,使得载荷4的悬挂点始终处于载荷4的正上方。
40.具体的,被动运动系统3主要由二维气浮导轨构成,能够进行小摩擦的被动适应运动。被动运动系统3通过连接杆2连接在主动运动系统1下方,横向气浮导轨7连接在连接杆2上,横向气浮轴承8套接在横向导向杆7上,连接套9一端固连在横向气浮轴承8上,另一端固连在纵向导向杆10上,纵向气浮轴承11套接在纵向导向杆10上,通过连接块12连接承重板13,载荷4悬吊在承重板13下方。受重力分力的作用,气浮轴承可在气浮导轨上进行滑动,直至悬吊点到达载荷正上方附近,下滑力不足以克服摩擦力为止。
41.当载荷4机动后,通过主动运动系统1中的四个两向运动单元6运动,可以主动运动粗略的使载荷保持被动运动系统3的可适应范围内,被动运动系统3适应范围不小于600mm
×
600mm。承载质量不小于200kg。
42.当出现多个运动平台需要进行交错运动时,依靠主动运动系统2进行位置机动,被动运动系统3可进行悬挂点位置的保持,详细示例可参见图5,主被动组合双层运动平台配合可以对载荷的交错式连续运动进行跟踪。
43.一种主被动组合悬挂式双层运动平台的使用方法,应用于上述的一种主被动组合悬挂式双层运动平台,当接到地面模拟任务后,首先进行主动运动系统1中支撑块5的位置及姿态放置和平整度调试,通过支撑块5形成轨道,使得两向运动单元6在支撑块5的支撑和导向下进行主动运动,进而安装并调整被动运动系统3的水平度;
44.而后,将需要进行地面模拟的设备替换载荷4的位置,悬吊在平台下方;
45.然后,接受外部测量系统反馈的载荷实时位置,驱动主动运动系统1运动,使得需要进行地面模拟的设备处于被动运动系统3可适应的范围内;
46.接着,在重力分力的作用下,被动运动系统3的纵向气浮轴承11沿着纵向导向杆10滑动,横向气浮轴承8沿着横向导向杆7滑动,在承重板13上的悬挂点进一步向需要进行地面模拟的设备的正上方靠近,直至重力分力不足以克服摩擦进行运动为止。
47.具体的,此外,如果出现两平台交错运动情况,本发明可以根据主被动双层平台的配合不改变被动平台的悬吊点位置,完成交错运动。下面进行一个简单的交错运动示例说明,如图5所示。
48.参见图5,给出了一个交错运动的可行实例,根据任务需求具体可通过路径规划进行复杂交错式运动设计。当需要进行交错式运动时,初始位置参见图5(a),
①
号平台在
②
号平台的上方,想要达到位置结果为
①
号平台在
②
号平台下方,参见图5(e),且
①
号平台的载荷4位置不发生移动。首先,
①
号平台通过主动运动系统1向左移动一个车位,参见图5(b),保持载荷4悬吊点位置不动,悬吊点在被动运动系统3上的位置由右侧运动到了左侧;然后,
②
号平台向上移动一个车位到
①
号平台原有位置,参见图5(c),悬吊点在被动运动系统3上的位置跟踪载荷运动情况;之后,
①
号向下移动一个车位,参见图5(d),此时悬吊点在被动运动系统3上的位置由上方转到了下方,依旧保持载荷4悬吊点位置不动;最后,
①
号平台向左移动一个车位,恢复到原有运动轨迹上参见图5(e),完成交错运动。此期间,在被动运动平台3的适应下可保证悬挂点始终处于被动适应平台的可达区域,可达区域范围参见图4,使得
①
号平台的载荷悬挂点位置不动,实现了交错式连续运动。
49.如若需要进行复杂的交错式运动,可以通过对主动运动平台进行合理的路径规划实现,始终保持所需悬挂点在被动运动平台的可达范围内,使得最终悬挂点位于载荷的正
上方附近。
50.以上实施示例只是用于帮助理解本发明的方法及其核心思想,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1