微型涡喷发动机控制系统的制作方法
1.本技术实施例涉及发动机控制领域,尤其涉及一种微型涡喷发动机控制系统。
背景技术:
2.无人机的应用领域非常广泛,比如可以为气象监测、交通流量监控、灾难预测等收集数据,在农业领域实现农业喷洒、辅助授粉和农情监测,还可以进行灾害救援等。
3.无人机的心脏是发动机。目前民用无人机用的涡喷发动机通常是推力范围在40至100公斤级的微型涡喷发动机,通过控制启动电机将发动机带到一定转速后,启动热火头和油泵,由热火头引燃煤油完成点火过程。运行过程中关闭启动电机与热火头,通过控制器控制油泵两端电压实现油泵电机的不同转速以完成不同的供油量,控制发动机进入不同运行状态。
4.油泵控制电路一般通过改变pwm(pulse width modulation,脉冲宽度调制)波的占空比来控制mos管开合以调整油泵电机的转速,油泵电机的转速直接影响油泵的出油量。由于油泵电机为感性负载,自身存在感应反电动势,从而导致油泵电机的控制存在死区,缩小了控制范围。
技术实现要素:
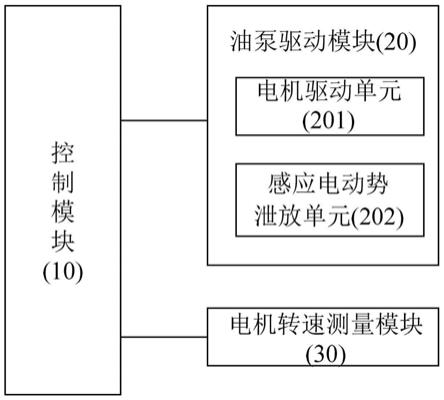
5.本技术实施例提供了一种微型涡喷发动机控制系统,包括:控制模块、油泵驱动模块和电机转速测量模块;所述油泵驱动模块包括电机驱动单元和感应电动势泄放单元;
6.电机转速测量模块,配置为通过测速传感器测量油泵电机的转速;
7.控制模块,配置为从所述电机转速测量模块获取油泵电机的转速信息,根据所述转速信息调整油泵电机的目标转速,根据调整后的目标转速生成第一脉冲宽度调制pwm信号并输出给所述油泵驱动模块;
8.电机驱动单元,配置为在输入的第一pwm信号为第一电平信号时,向油泵电机的电压输入端输出电压驱动信号;在输入的第一pwm信号为第二电平信号时,不向油泵电机的电压输入端输出电压驱动信号;
9.感应电动势泄放单元,配置为在输入的第一pwm信号为第二电平信号时,泄放所述油泵电机的电压输入端上的电压;其中,第一电平和第二电平中的一个为高电平,另一个为低电平。
10.本技术实施例的微型涡喷发动机控制系统包括控制模块、油泵驱动模块和电机转速测量模块,控制模块从所述电机转速测量模块获取油泵电机的转速信息,根据所述转速信息调整油泵电机的目标转速,根据调整后的目标转速生成第一pwm信号并输出给所述油泵驱动模块;当第一pwm信号为第二电平信号时,油泵电机的电压输入端没有驱动电压信号输入,通过设置感应电动势泄放单元,能够在输入的第一pwm信号为第二电平信号时及时泄放所述油泵电机的电压输入端上的电压,从而减轻油泵电机的感应电动势对油泵电机转速控制的影响,增加油泵电机转速控制的灵敏度,由于油泵电机的转速直接影响油泵的出油
量,因此增加了油泵出油控制的灵敏度。并且,通过实时监测油泵电机的转速来控制油泵电机,能够提高油泵控制的精度。
11.在阅读并理解了附图和详细描述后,可以明白其他方面。
附图说明
12.附图用来提供对本技术技术方案的理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
13.图1为本技术实施例的一种微型涡喷发动机控制系统的示意图;
14.图2为本技术实施例的另一种微型涡喷发动机控制系统的示意图;
15.图3为本技术实施例的一种启动电机驱动模块的示意图;
16.图4为本技术实施例的一种热火头驱动模块的示意图;
17.图5为本技术实施例的一种油泵电机驱动模块的示意图。
具体实施方式
18.本技术描述了多个实施例,但是该描述是示例性的,而不是限制性的,并且对于本领域的普通技术人员来说显而易见的是,在本技术所描述的实施例包含的范围内可以有更多的实施例和实现方案。尽管在附图中示出了许多可能的特征组合,并在具体实施方式中进行了讨论,但是所公开的特征的许多其它组合方式也是可能的。除非特意加以限制的情况以外,任何实施例的任何特征或元件可以与任何其它实施例中的任何其他特征或元件结合使用,或可以替代任何其它实施例中的任何其他特征或元件。
19.本技术包括并设想了与本领域普通技术人员已知的特征和元件的组合。本技术已经公开的实施例、特征和元件也可以与任何常规特征或元件组合,以形成由所附权利要求限定的独特的发明方案。任何实施例的任何特征或元件也可以与来自其它发明方案的特征或元件组合,以形成另一个由所附权利要求限定的独特的发明方案。因此,应当理解,在本技术中示出和/或讨论的任何特征可以单独地或以任何适当的组合来实现。因此,除了根据所附权利要求及其等同替换所做的限制以外,实施例不受其它限制。此外,可以在所附权利要求的保护范围内进行各种修改和改变。
20.如图1所示,本技术实施例提供了一种微型涡喷发动机控制系统,包括:控制模块10、油泵驱动模块20和电机转速测量模块30;所述油泵驱动模块包括电机驱动单元201和感应电动势泄放单元202;
21.电机转速测量模块,配置为通过测速传感器测量油泵电机的转速;
22.控制模块,配置为从所述电机转速测量模块获取油泵电机的转速信息,根据所述转速信息调整油泵电机的目标转速,根据调整后的目标转速生成第一脉冲宽度调制pwm信号并输出给所述油泵驱动模块;
23.电机驱动单元,配置为在输入的第一pwm信号为第一电平信号时,向油泵电机的电压输入端输出电压驱动信号;在输入的第一pwm信号为第二电平信号时,不向油泵电机的电压输入端输出电压驱动信号;
24.感应电动势泄放单元,配置为在输入的第一pwm信号为第二电平信号时,泄放所述油泵电机的电压输入端上的电压;其中,第一电平和第二电平中的一个为高电平,另一个为
低电平。
25.本实施例提供的微型涡喷发动机控制系统包括控制模块、油泵驱动模块和电机转速测量模块;电机转速测量模块配置为通过测速传感器测量油泵电机的转速;控制模块配置为从所述电机转速测量模块获取油泵电机的转速信息,根据所述转速信息调整油泵电机的目标转速,根据调整后的目标转速生成第一pwm信号并输出给所述油泵驱动模块;油泵驱动模块包括电机驱动单元和感应电动势泄放单元,电机驱动单元配置为在输入的第一pwm信号为第一电平信号时向油泵电机的电压输入端输出电压驱动信号,在输入的第一pwm信号为第二电平信号时,不向油泵电机的电压输入端输出电压驱动信号。当第一pwm信号为第二电平信号时,油泵电机的电压输入端没有驱动电压信号输入,由于油泵电机属于感性负载,所以在油泵电机的电压输入端上产生感应电动势,如果感应电动势不能被快速耗散,则油泵电机的控制存在延迟,不能得到精确控制。本技术通过设置感应电动势泄放单元,能够在输入的第一pwm信号为第二电平信号时及时泄放所述油泵电机的电压输入端上的电压,从而减轻油泵电机的感应电动势对油泵电机转速控制的影响,增加油泵电机转速控制的灵敏度,由于油泵电机的转速直接影响油泵的出油量,因此增加了油泵出油控制的灵敏度。并且,通过实时监测油泵电机的转速来控制油泵电机,能够提高油泵控制的精度。本实施例提供的微型涡喷发动机控制系统应用在无人机上,能够提高无人机的飞行控制精度,使得无人机在飞行控制中的控制轨迹更加精确。
26.在一些示例性的实施方式中,如图2所示,所述微型涡喷发动机控制系统还包括:启动电机驱动模块;
27.控制模块,还配置为向启动电机驱动模块发送第二pwm信号;
28.所述启动电机驱动模块,配置为根据输入的第二pwm信号控制启动电机的转速。
29.相关技术中,启动电机功率较高(比如在200至1000w之间),控制器驱动继电器间接控制启动电机启动,由于启动电机在启动瞬间电流过高,对其自身和供电电池都存在一定损坏。本技术实施例通过控制模块向启动电机驱动模块发送第二pwm信号,由于pwm信号可以精确控制电机的转速,因而可以实现启动电机的缓启动,使得启动电机的转速逐渐上升,避免启动电机在启动瞬间电流过高,从而保护启动电机和供电电池。本实施例提供的微型涡喷发动机控制系统应用在无人机上,能够保护启动电机和供电电池,从而延长无人机发动机的寿命。
30.在一些示例性的实施方式中,如图2所示,所述微型涡喷发动机控制系统还包括:热火头驱动模块;
31.控制模块,还配置为向热火头驱动模块发送第三pwm信号;
32.所述热火头驱动模块,配置为根据输入的第三pwm信号控制输出给热火头的供电电压。
33.热火头为碳化硅材质,通过向两端施加一定电压后热火头发光发热以此引燃煤油。相关技术中,控制器驱动继电器实现热火头两端供电以完成引燃工作。由于碳化硅从低温向高温过渡时阻值明显增大,因此在热火头工作初期阻值低电流大,对电池冲击较大,电流过大导致温度急剧变化也造成对热火头的温度冲击,使热火头容易损坏和减少使用寿命。本技术实施例通过控制模块向热火头驱动模块发送第三pwm信号,由于pwm信号可以精确控制提供给热火头的供电电压的大小,因而可以实现热火头的温度逐渐上升,避免热火
头在加电瞬间电流过高,从而保护热火头和供电电池。本实施例提供的微型涡喷发动机控制系统应用在无人机上,能够保护热火头和供电电池,从而延长无人机发动机的寿命。
34.在一些示例性的实施方式中,所述第一pwm信号是占空比变化的pwm信号。所述第一pwm信号的占空比与驱动油泵电机转动的驱动电压具有关联关系,通过改变第一pwm信号的占空比,可以改变驱动油泵电机转动的驱动电压,从而改变油泵电机的转速。
35.在一些示例性的实施方式中,所述第二pwm信号是占空比可调的pwm信号;所述第二pwm信号的占空比逐渐增大直到第一预设阈值。所述第二pwm信号的占空比与驱动启动电机转动的驱动电压具有关联关系,通过改变第二pwm信号的占空比,可以改变驱动启动电机转动的驱动电压,从而改变启动电机的转速。通过使第二pwm信号的占空比逐渐增大,能够实现启动电机的缓启动,使得启动电机的转速逐渐上升,避免启动电机在启动瞬间电流过高,从而保护启动电机和供电电池。
36.在一些示例性的实施方式中,所述第三pwm信号是占空比可调的pwm信号;所述第三pwm信号的占空比逐渐增大直到第二预设阈值。所述第三pwm信号的占空比与热火头的供电电压具有关联关系,通过改变第三pwm信号的占空比,可以改变热火头的供电电压。通过使第三pwm信号的占空比逐渐增大,能够实现热火头的温度逐渐上升,避免热火头在加电瞬间电流过高,从而保护热火头和供电电池。
37.在一些示例性的实施方式中,如图3所示,所述启动电机驱动模块包括:第一开关管驱动单元u1、第一电阻r1和第一开关管m1;
38.其中,所述第一开关管驱动单元包括输入端和输出端,配置为对输入端输入的第二pwm信号进行放大,向输出端输出放大后的第二pwm信号;
39.所述第一开关管包括控制极、第一极和第二极;所述第一开关管的控制极连接第一电阻的第一端,第一电阻的第二端连接第一开关管驱动单元的输出端;所述第一开关管的第一极连接启动电机mt1的第一电压输入端;所述第一开关管的第二极接地;其中,所述第一开关管的第一极和第二极中的一个为源极,另一个为漏极;所述启动电机的第二电压输入端连接电池的正极,所述电池的负极接地。启动电机的第一电压输入端和第二电压输入端中的一个是高电平输入端,另一个是低电平输入端。图3中表示的是启动电机的第一电压输入端是低电平输入端,启动电机的第二电压输入端是高电平输入端。
40.在一些示例性的实施方式中,所述第一开关管m1包括:大功率场效应晶体管(金属
‑
氧化物半导体场效应晶体管,简称mos管)。比如,可以采用mos管irf3205作为第一开关管。
41.在一些示例性的实施方式中,所述第一开关管驱动单元u1可以采用专用的mos管驱动芯片。比如,采用mos管驱动芯片irs44262s。
42.以第一开关管是高电平导通低电平截止的n型mos管为例,第二pwm信号为高电平信号时,第一开关管导通,启动电机的第一电压输入端接地,启动电机的供电回路导通,启动电机通电;第二pwm信号为低电平信号时,第一开关管截止,启动电机的第一电压输入端浮接,启动电机的供电回路断开,启动电机断电。通过第二pwm信号的占空比的变化,能够改变启动电机供电时间的长短,从而改变启动电机的转速。
43.在一些示例性的实施方式中,如图4所示,所述热火头驱动模块包括:第二开关管驱动单元u2、第二电阻r2和第二开关管m2;
44.其中,所述第二开关管驱动单元包括输入端和输出端,配置为对输入端输入的第三pwm信号进行放大,向输出端输出放大后的第三pwm信号;
45.所述第二开关管包括控制极、第一极和第二极;所述第二开关管的控制极连接第二电阻的第一端,第二电阻的第二端连接第二开关管驱动单元的输出端;所述第二开关管的第一极连接热火头sp1的第一电压输入端;所述第二开关管的第二极接地;其中,所述第二开关管的第一极和第二极中的一个为源极,另一个为漏极;所述热火头的第二电压输入端连接电池的正极,所述电池的负极接地。热火头的第一电压输入端和第二电压输入端中的一个是高电平输入端,另一个是低电平输入端。图4中表示的是热火头的第一电压输入端是低电平输入端,热火头的第二电压输入端是高电平输入端。
46.在一些示例性的实施方式中,所述第二开关管m2包括:大功率场效应晶体管。比如,可以采用mos管irf3205作为第二开关管。
47.在一些示例性的实施方式中,所述第二开关管驱动单元u2可以采用专用的mos管驱动芯片。比如,采用mos管驱动芯片irs44262s。
48.以第二开关管是高电平导通低电平截止的n型mos管为例,第三pwm信号为高电平信号时,第二开关管导通,热火头的第一电压输入端接地,热火头的供电回路导通,热火头通电,热火头温度上升;第三pwm信号为低电平信号时,第二开关管截止,热火头的第一电压输入端浮接,热火头的供电回路断开,热火头断电。通过第三pwm信号的占空比的变化,能够改变热火头供电时间的长短,从而改变热火头的升温速度。
49.在一些示例性的实施方式中,所述测速传感器包括:电磁传感器或霍尔传感器。比如,可以采用高灵敏度磁性传感器kmz10a,该磁性传感器能够将电机转轴旋转变化的磁场强度转变为正弦曲线变化的电压并输出。
50.在一些示例性的实施方式中,如图5所示,所述油泵驱动模块包括:半桥开关电路驱动单元u3、第三电阻r3、第四电阻r4、第三开关管m3和第四开关管m4;
51.所述半桥开关电路驱动单元包括输入端、第一输出端ho和第二输出端lo,配置为对输入端输入的第一pwm信号进行放大,在第一输出端输出与第一pwm信号同相的pwm输出信号,在第二输出端输出与第一pwm信号反相的pwm输出信号;也即,第一pwm信号是高电平时,第一输出端输出高电平信号,第二输出端输出低电平信号;第一pwm信号是低电平时,第一输出端输出低电平信号,第二输出端输出高电平信号;
52.所述第三开关管包括控制极、第一极和第二极;所述第三开关管的控制极连接第三电阻的第一端,第三电阻的第二端连接半桥开关电路驱动单元的第一输出端;所述第三开关管的第一极连接第一电源信号vdd端;所述第三开关管的第二极连接油泵电机mt2的第一电压输入端;
53.所述第四开关管包括控制极、第一极和第二极;所述第四开关管的控制极连接第四电阻的第一端,第四电阻的第二端连接半桥开关电路驱动单元的第二输出端;所述第四开关管的第一极连接油泵电机mt2的第一电压输入端,所述第四开关管的第二极接地;所述油泵电机的第二电压输入端接地;
54.油泵电机的第一电压输入端和第二电压输入端中的一个是高电平输入端,另一个是低电平输入端。图5中表示的是油泵电机的第一电压输入端是高电平输入端,油泵电机的第二电压输入端是低电平输入端。
55.在一些示例性的实施方式中,所述第一电源信号vdd是对电池提供的电压信号进行隔离处理后得到的供电电压信号。
56.在一些示例性的实施方式中,所述第三开关管和第四开关管包括:大功率场效应晶体管。比如,可以采用mos管irf3205作为第三开关管和第四开关管。
57.在一些示例性的实施方式中,所述半桥开关电路驱动单元u3可以采用专用的半桥mos管驱动芯片。比如,采用半桥mos管驱动芯片ir2104,可以实现单pwm波输入即可驱动两个mos管。两个mos管的工作状态可以不同,一个导通另一个截止。
58.以第三开关管和第四开关管均是高电平导通低电平截止的n型mos管为例说明油泵驱动模块的工作过程。
59.第一pwm信号为高电平信号时,半桥开关电路驱动单元的第一输出端输出高电平信号,第三开关管导通,第三开关管的第二极的电压为第一电源信号vdd的电压,油泵电机的第一电压输入端获得第一电源信号,油泵电机的第二电压输入端接地,油泵电机的供电电路导通并获得电源电压。第一pwm信号为高电平信号时,半桥开关电路驱动单元的第二输出端输出低电平信号,第四开关管截止,不影响油泵电机的第一电压输入端的电位。
60.第一pwm信号为低电平信号时,半桥开关电路驱动单元的第二输出端输出高电平信号,第四开关管导通,第四开关管的第一极通过第四开关管的导电沟道接地,由于油泵电机的第二电压输入端接地,所以油泵电机的第一电压输入端和第二电压输入端之间短路,也即,第四开关管导通使得油泵电机的第一电压输入端上的电压(包括油泵电机的感应电动势)通过第四开关管进行泄放。第一pwm信号为低电平信号时,半桥开关电路驱动单元的第一输出端输出低电平信号,第三开关管截止,不影响油泵电机的第一电压输入端的电位。
61.在第一pwm信号为低电平信号时通过第四开关管及时泄放所述油泵电机的电压输入端上的电压,从而减轻油泵电机的感应电动势对油泵电机转速控制的影响,增加油泵电机转速控制的灵敏度,由于油泵电机的转速直接影响油泵的出油量,因此增加了油泵出油控制的灵敏度。
62.本领域普通技术人员可以理解,上文中所公开的装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些组件或所有组件可以被实施为由处理器,如数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。
63.虽然本公开所揭露的实施方式如上,但所述的内容仅为便于理解本公开而采用的实施方式,并非用以限定本公开。任何本公开所属领域内的技术人员,在不脱离本公开所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本公开的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1