基于视觉识别的智能分类垃圾桶的制作方法
[0001]
本发明涉及垃圾桶的技术领域,尤其是涉及一种基于视觉识别的智能分类垃圾桶。
背景技术:
[0002]“垃圾桶”作为当代人类生活中不可或缺的必需品。尤其是在当今的社区居家、酒店市场更是必不可少。随着人们环保意识和审美水平的普遍提高,垃圾桶的种类和数量也在不断翻新和增加,继而在国内外众多城市都掀起了垃圾桶的研发热潮。同时,对垃圾进行分类投放也可以提高垃圾的资源价值和经济价值,力争物尽其用。城市市政垃圾筒作为承载城市生活垃圾的主要途径,其对垃圾的分类再利用具有重要意义,通过对源头的垃圾存放终端进行前期的垃圾分拣分类可大大节约后期垃圾分类的成本和时间。
技术实现要素:
[0003]
本发明的目的是提供一种基于视觉识别的智能分类垃圾桶,其提供一种可自行分类垃圾,对垃圾进行挤压压缩,提高垃圾桶利用率的智能分类垃圾桶。
[0004]
本发明的上述发明目的是通过以下技术方案得以实现的:
[0005]
一种基于视觉识别的智能分类垃圾桶,包括垃圾桶本体,所述垃圾桶本体内部设置有上层隔板和下层隔板,垃圾桶本体通过隔板分割成上层桶体、中层桶体和下层桶体,下层桶体内设置垃圾桶旋转装置,垃圾桶旋转装置上设置有多个垃圾桶,中层桶体内设置有挤压装置、压实装置和通道换向装置,上层桶体内设置有控制装置和垃圾识别系统,上层桶体的顶部开设有垃圾入口,上层隔板和下层隔板上相对的开设有垃圾通孔。
[0006]
优选地,所述垃圾桶旋转装置包括驱动电机一、齿轮一、齿轮二、转动轴和转盘,下层桶体的底部侧壁上开设有凹槽,凹槽内安装有轴承,轴承水平设置,转动轴竖直穿设在轴承的内圈上,转盘水平设置于下层桶体靠近底部的位置,转动轴远离轴承的一端与转盘同轴固定连接,驱动电机一固定设置在下层桶体的内底面上且位于转盘的下方,驱动电机一的输出轴竖直向上,齿轮一同轴固定连接在驱动电机一的输出轴上,齿轮二同轴固定连接在转动轴上,齿轮一与齿轮二相啮合,多个垃圾桶沿转盘的圆周均匀固定设置,多个垃圾桶的开口竖直朝上。
[0007]
优选地,所述转盘上设置有垃圾桶固定装置,垃圾桶固定装置包括中轴和卡箍,中轴竖直固定在转盘上,转盘的轴线与中轴的轴线重合,卡箍固定连接在中轴上,卡箍沿中轴的圆周均匀设置,垃圾桶通过卡箍固定连接。
[0008]
优选地,所述挤压装置包括滑块、导筒、连接杆、曲柄、圆盘和减速电机,下层隔板上固定设置有支撑座,导筒水平固定设置在支撑座上,下层隔板还开设有可压缩垃圾孔,导筒的一端位于可压缩垃圾孔的上方且靠近可压缩垃圾孔的侧壁上开设有小孔,小孔与可压缩垃圾孔相对应,导筒的上侧壁上还开设有掉落孔,掉落孔处固定设置有接物斗,滑块滑动配合在导筒内,连接杆铰接在滑块远离小孔的一端,连接杆的另一端与曲柄相铰接,减速电
机固定设置在支撑座上,圆盘固定连接在减速电机的输出轴上,曲柄远离连接杆的一端铰接在圆盘上。
[0009]
优选地,所述压实装置包括固定架、安装板、驱动电机二、滑杆、螺杆、滑块螺母、固定杆和压实盘,固定架竖直固定连接在下层隔板上,安装板水平固定连接在固定架的侧壁上,滑杆有两个,两个滑杆均竖直固定连接在安装板上,螺杆位于两个滑杆之间且竖直穿设在安装板上,驱动电机二的输出轴竖直设置,螺杆与驱动电机二的输出轴同轴固定连接,滑块螺母穿设在两个滑杆和螺杆上,滑块螺母与螺杆螺纹连接,固定杆设置为l形,固定杆的一端水平固定连接在滑块螺母的侧壁上,固定杆的另一端竖直向下,压实盘固定连接在固定杆远离滑块螺母的一端,下层隔板上开设有穿孔,穿孔的轴线与压实盘的轴线重合,每个垃圾桶的内侧壁上均设置有红外对管,红外对管位于垃圾桶靠近顶部的位置。
[0010]
优选地,所述通道换向装置包括牵引电机、牵引轴、牵引线、牵引板和倾斜板,上层隔板上固定设置有挡板,挡板位于垃圾通孔的一侧,牵引电机固定连接在挡板上,牵引轴同轴固定连接在牵引电机的输出轴上,倾斜板倾斜固定连接在挡板的侧壁上,倾斜板较低的一端位于接物斗的上方,倾斜板的另一端与牵引板的一端铰接,牵引板的长度方向与倾斜板的长度方向一致,牵引线的一端固定连接在牵引轴上,牵引线的另一端连接在牵引板远离倾斜板的一端。
[0011]
优选地,所述垃圾识别系统包括智能摄像机,智能摄像机安装在上层桶体的侧壁上,智能摄像机朝向垃圾通孔处,控制装置包括主控mcu,智能摄像机、驱动电机一、驱动电机二、红外对管和牵引电机均与主控mcu信号连接。
[0012]
优选地,所述垃圾入口和上层隔板上的垃圾通孔处均水平盖设有旋转门,旋转门上设置有自动开合组件,自动开合组件包括驱动电机三、连接轴、齿轮三和齿轮四,垃圾入口处的驱动电机三固定连接在上层桶体的内顶壁上,连接轴的一端固定连接在旋转门的侧壁上,另一端伸入上层桶体,齿轮三同轴固定穿设在连接轴上,齿轮四同轴固定连接在驱动电机三的输出轴上,齿轮三与齿轮四相啮合,上层隔板上的垃圾通孔处的驱动电机三固定连接在上层隔板上,连接轴的一端固定连接在旋转门的侧壁上,另一端穿设在上层隔板上,齿轮三同轴固定穿设在连接轴上,齿轮四同轴固定连接在驱动电机三的输出轴上,齿轮三与齿轮四相啮合,每个驱动电机三均与主控mcu信号连接。
[0013]
优选地,所述下层桶体的侧壁上设置有门体一,中层桶体上开设有门体二,门体一与门体二均铰接。
[0014]
综上所述,本发明的有益技术效果为:
[0015]
1、通过设置主控mcu和智能摄像机,实现对垃圾的智能分类;
[0016]
2、通过设置垃圾桶旋转装置、挤压装置、压实装置和通道换向装置,将一个投放口对应五个可转位垃圾桶,准确高效,同时挤压装置和压实装置实现对垃圾桶空间的充分利用。
附图说明
[0017]
图1是本发明的整体结构示意图;
[0018]
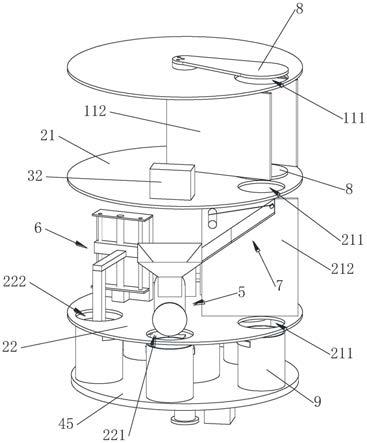
图2是本发明的内部结构示意图;
[0019]
图3是图2的主视结构示意图;
[0020]
图4是挤压装置和压实装置的位置示意图;
[0021]
图5是压实装置的结构示意图;
[0022]
图6是挤压装置的结构示意图;
[0023]
图7是通道换向装置的结构示意图;
[0024]
图8是垃圾桶旋转装置的结构示意图;
[0025]
图9是为示出驱动电机三和智能摄像机的结构示意图。
[0026]
图中,11、上层桶体;111、垃圾入口;112、竖直板;12、中层桶体;121、门体二;13、下层桶体;131、门体一;21、上层隔板;211、垃圾通孔;212、挡板;22、下层隔板;221、可压缩垃圾孔;222、穿孔;31、智能摄像机;32、主控mcu;41、驱动电机一;42、齿轮一;43、齿轮二;44、转动轴;45、转盘;451、中轴;452、卡箍;5、挤压装置;51、滑块;52、导筒;521、小孔;522、掉落孔;523、接物斗;53、连接杆;54、曲柄;55、圆盘;56、减速电机;57、支撑座;6、压实装置;61、固定架;611、安装板;62、驱动电机二;63、滑杆;64、螺杆;65、滑块螺母;66、固定杆;67、压实盘;7、通道换向装置;71、牵引电机;72、牵引轴;73、牵引线;74、牵引板;75、倾斜板;8、旋转门;81、驱动电机三;82、连接轴;83、齿轮三;84、齿轮四;9、垃圾桶;91、红外对管。
具体实施方式
[0027]
以下结合附图对本发明作进一步详细说明。
[0028]
参考图1-图9,为本发明公开的一种基于视觉识别的智能分类垃圾桶,包括垃圾桶本体,垃圾桶本体内部通过螺栓固定设置有上层隔板21和下层隔板22,垃圾桶本体通过隔板分割成上层桶体11、中层桶体12和下层桶体13。下层桶体13内设置垃圾桶旋转装置,垃圾桶旋转装置用于转换垃圾桶9的位置。垃圾桶旋转装置上设置有五个垃圾桶9,五个垃圾桶9分别用于盛装厨余、有害、可回收、其他和异常垃圾。中层桶体12内设置有挤压装置5、压实装置6和通道换向装置7,挤压装置5用于对可回收垃圾(例如易拉罐、塑料瓶等)进行挤压,使其体积变小节省空间,压实装置6用于对各个垃圾桶9内的垃圾进行下压,使垃圾桶9腾出空间,通道换向装置7用于将可回收垃圾送入挤压装置5内。上层桶体11内设置有控制装置和垃圾识别系统,上层桶体11的顶部开设有垃圾入口111,上层隔板21和下层隔板22上相对的开设有垃圾通孔211,可回收垃圾外的其他垃圾先后通过垃圾入口111、上层隔板21上的垃圾通孔211和上层隔板21上的垃圾通孔211掉入垃圾桶9内。上层桶体11的顶壁上固定设置有两个竖直板112,两个竖直板112位于上层隔板21上的垃圾通孔211两侧。
[0029]
垃圾识别系统包括智能摄像机31,智能摄像机31采用的ov2640智能摄像头,智能摄像机31固定安装在上层桶体11的侧壁上,智能摄像机31朝向垃圾通孔211处。下层桶体13的侧壁上设置有门体一131,门体一131为自动控制的门体,中层桶体12上开设有门体二121,门体一131与门体二121均铰接,门体二121打开后,方便对垃圾桶9内部进行检修。控制装置包括主控mcu32,智能摄像机31、门体一131均与主控mcu32信号连接。
[0030]
垃圾桶9旋转装置包括驱动电机一41、齿轮一42、齿轮二43、转动轴44和转盘45,驱动电机一41与主控mcu32信号连接。下层桶体13的底部侧壁上开设有凹槽,凹槽内水平固定安装有轴承,转动轴44竖直穿设在轴承的内圈上。转盘45水平设置于下层桶体13靠近底部的位置,转动轴44远离轴承的一端与转盘45同轴固定连接。驱动电机一41固定设置在下层桶体13的内底面上且位于转盘45的下方,驱动电机一41的输出轴竖直向上,齿轮一42同轴
固定连接在驱动电机一41的输出轴上,齿轮二43同轴固定连接在转动轴44上,齿轮一42与齿轮二43相啮合。转盘45上设置有垃圾桶9固定装置,垃圾桶9固定装置包括中轴451和卡箍452,中轴451竖直固定在转盘45上,转盘45的轴线与中轴451的轴线重合,卡箍452固定连接在中轴451上,卡箍452沿中轴451的圆周均匀设置,每个垃圾桶9通过一个卡箍452固定连接。驱动驱动电机一41,驱动电机一41会带动齿轮一42转动,齿轮一42转动又会带动齿轮二43转动,齿轮二43转动进一步带动转盘45转动,从而实现垃圾桶9的位置转换。
[0031]
挤压装置5包括滑块51、导筒52、连接杆53、曲柄54、圆盘55和减速电机56,减速电机56一与主控mcu32信号连接。下层隔板22上固定设置有支撑座57,导筒52水平固定设置在支撑座57上。下层隔板22还开设有可压缩垃圾孔221,导筒52的一端位于可压缩垃圾孔221的上方且靠近可压缩垃圾孔221的侧壁上开设有小孔521,小孔521与可压缩垃圾孔221相对应。导筒52的上侧壁上还开设有掉落孔522,掉落孔522处固定设置有接物斗523。滑块51滑动配合在导筒52内,连接杆53铰接在滑块51远离小孔521的一端,连接杆53的另一端与曲柄54相铰接,减速电机56固定设置在支撑座57上,圆盘55固定连接在减速电机56的输出轴上,曲柄54远离连接杆53的一端铰接在圆盘55上。当可回收垃圾掉落在接物斗523内时,垃圾通过掉落孔522进入导筒52内,此时减速电机56带动圆盘55转动,圆盘55转动又会带动曲柄54和连接杆53联动,根据曲柄54滑块51的原理,滑块51会沿着到导筒52的长度方向左右移动,从而对导筒52内的垃圾进行压缩,使其体积变小后通过小孔521掉落到可回收垃圾桶9内。
[0032]
压实装置6括固定架61、安装板611、驱动电机二62、滑杆63、螺杆64、滑块螺母65、固定杆66和压实盘67,驱动电机二62与主控mcu32信号连接。固定架61竖直固定连接在下层隔板22上,安装板611水平固定连接在固定架61的侧壁上。滑杆63有两个,两个滑杆63均竖直固定连接在安装板611上,螺杆64位于两个滑杆63之间且竖直穿设在安装板611上。驱动电机二62的输出轴竖直设置,螺杆64与驱动电机二62的输出轴同轴固定连接,滑块螺母65穿设在两个滑杆63和螺杆64上,滑块螺母65与螺杆64螺纹连接。固定杆66设置为l形,固定杆66的一端水平固定连接在滑块螺母65的侧壁上,固定杆66的另一端竖直向下,压实盘67固定连接在固定杆66远离滑块螺母65的一端。下层隔板22上开设有穿孔222,穿孔222的轴线与压实盘67的轴线重合。每个垃圾桶9的内侧壁上均设置有红外对管91,红外对管91位于垃圾桶9靠近顶部的位置,红外对管91与主控mcu32信号连接。驱动电机二62工作带动螺杆64同轴转动,螺杆64转动带动滑块螺母65沿着滑杆63上下移动,从而带动压实盘67通过穿孔222上下移动。
[0033]
通道换向装置7包括牵引电机71、牵引轴72、牵引线73、牵引板74和倾斜板75,牵引电机71与主控mcu32信号连接。上层隔板21上固定设置有挡板212,挡板212位于垃圾通孔211的一侧,牵引电机71固定连接在挡板212上,牵引轴72同轴固定连接在牵引电机71的输出轴上,倾斜板75倾斜固定连接在挡板212的侧壁上,倾斜板75较低的一端位于接物斗523的上方,倾斜板75的另一端通过合页与牵引板74的一端铰接,牵引板74的长度方向与倾斜板75的长度方向一致,牵引线73的一端固定连接在牵引轴72上,牵引线73的另一端连接在牵引板74远离倾斜板75的一端。正常情况下,牵引板74处于竖直状态,当有可回收垃圾掉落时,牵引电机71带动牵引轴72转动,将缠绕在牵引轴72上的牵引线73松开,从而使牵引板74倾斜,使可回收垃圾沿着牵引板74和倾斜板75的倾斜方向移动,进而掉落在接物斗523内。
[0034]
垃圾入口111和上层隔板21上的垃圾通孔211处均水平盖设有旋转门8,旋转门8上
设置有自动开合组件,自动开合组件包括驱动电机三81、连接轴82、齿轮三83和齿轮四84。垃圾入口111处的驱动电机三81固定连接在上层桶体11的内顶壁上,连接轴82的一端固定连接在旋转门8的侧壁上,另一端伸入上层桶体11,齿轮三83同轴固定穿设在连接轴82上,齿轮四84同轴固定连接在驱动电机三81的输出轴上,齿轮三83与齿轮四84相啮合。上层隔板21上的垃圾通孔211处的驱动电机三81固定连接在上层隔板21上,连接轴82的一端固定连接在旋转门8的侧壁上,另一端穿设在上层隔板21上,齿轮三83同轴固定穿设在连接轴82上,齿轮四84同轴固定连接在驱动电机三81的输出轴上,齿轮三83与齿轮四84相啮合,每个驱动电机三81均与主控mcu32信号连接。
[0035]
上述实施例的实施原理为:打开垃圾入口111处的旋转门8,通过垃圾入口111投入垃圾,垃圾会掉落在设置于上层隔板21上的旋转门8上,智能摄像机31对垃圾进行拍照,并将信息传递给主控mcu32,主控mcu32对垃圾进行识别分类后,控制驱动电机一41工作,使对应的垃圾桶9转动到垃圾通孔211下方,接着主控mcu32控制驱动电机三81,使驱动电机三81工作带动旋转门8快速打开,旋转门8上的垃圾会沿着垃圾通孔211掉落在下方的垃圾桶9内。当主控mcu32识别出垃圾为易拉罐或者塑料瓶时,主控mcu32控制牵引电机71工作,将牵引板74放下,并控制驱动电机一41,使可回收垃圾桶9转动到可压缩垃圾孔221下方,同时驱动减速电机56和驱动电机三81工作,旋转门8打开,垃圾掉落在牵引板74上,并沿着牵引板74和倾斜板75送入接物斗523内,并在导筒52内被滑块51压缩,从小孔521掉入到可回收垃圾桶9内。当使用一段时间后,垃圾桶9内的垃圾达到红外对管91的高度位置时,红外对管91会将信号反馈给主控mcu32,主控mcu32控制驱动电机一41工作,将该垃圾桶9转换到穿孔222下方,并驱动驱动电机二62控制压实盘67下压到下方的垃圾桶9内,对垃圾桶9内的垃圾进行压实操作,压实完成后,若垃圾桶9内的垃圾低于红外对管91的高度时,停止压实操作;若垃圾桶9内的垃圾依然高于红外对管91的高度时,主控mcu32会控制驱动电机一41将该垃圾桶9转换到门体一131处,并控制门体一131打开,提醒更换垃圾桶9。
[0036]
显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而这些属于本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1