后装垃圾车的提升机构的制作方法
1.本实用新型涉及后装垃圾车领域,尤其涉及后装垃圾车的提升机构。
背景技术:
2.当前,随着社会的发展及人们环保意识的提高,对环卫设备提出了更高的要求。现有的压缩式垃圾车提升机构位于车辆后部,即后装垃圾车,该车收集的垃圾主要针对含水量相对较少的生活垃圾,其提升机构的投料口的高度较低,不适用于收集含水量高的垃圾,并且垃圾桶在提升过程中质心位置不断变化,不利于智能化称重系统的公式计算;餐厨垃圾车的提升机构普遍置于车辆侧面,即侧装垃圾车,其收集的垃圾以含水量高的厨余垃圾为主,投料口高度较高,由于受底盘、箱体结构限制及考虑左右配重,一般仅设单桶上料,上料效率较低。
技术实现要素:
3.本实用新型的目的在于提供一种后装垃圾车的提升机构,以实现高效、后装垃圾、高位上料的垃圾收运。
4.为实现上述目的,本实用新型采用以下技术方案:
5.后装垃圾车的提升机构,包括提升驱动机构、提升架、翻转架和升降架,所述提升驱动机构连接提升架并带动提升架升降,所述翻转架的上部通过销轴转动连接于提升架的顶部,且翻转架由一驱转机构带动翻转,所述升降架用于夹持垃圾桶,升降架沿竖直方向滑动连接于翻转架上,且升降架由一升降驱动机构带动升降。
6.进一步的,所述提升驱动机构包括支座、提升油缸、一对下摆臂和一对上摆臂,所述支座固定于垃圾车的上装上,一对下摆臂和一对上摆臂的一端分别与支座转动连接,一对下摆臂和一对上摆臂的另一端分别与提升架转动连接,所述提升油缸驱动下摆臂或上摆臂旋转。
7.进一步的,所述翻转架的两侧上分别设有沿竖直方向设置的滑槽,所述升降架上设有滑动连接于对应滑槽内的滑动件。
8.进一步的,所述滑动件为滑轮或滑块。
9.进一步的,所述升降架上部的两侧分别转动连接有支撑臂,两支撑臂用于夹持容量为660l的垃圾桶,所述升降架的顶部设有齿板架,齿板架上的多个齿板用来夹持容量为240l的垃圾桶。
10.进一步的,所述驱转机构和升降驱动机构分别为油缸。
11.本实用新型采用以上技术方案,具有以下技术效果:
12.1、升降架可升降连接于翻转架上,能够实现高位上料,尤其适用厨余垃圾的收运,而且还可以适用于不同高度垃圾桶的上料;
13.2、通过四连杆机构驱动垃圾桶提升,提升过程中可保证垃圾桶的竖直上料,避免厨余垃圾因垃圾桶倾斜而泄漏;
14.3、采用后装垃圾的方式,上料效率高,可同时提升两个240l垃圾桶或单个660l垃圾桶。
附图说明
15.以下结合附图和具体实施方式对本实用新型做进一步详细说明;
16.图1为本实用新型的立体图;
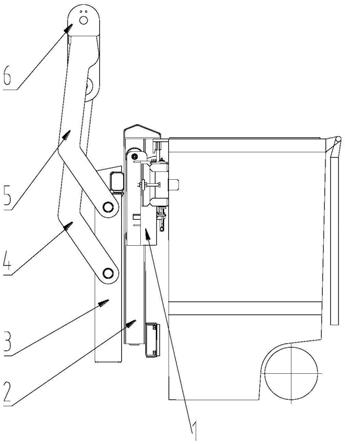
17.图2为本实用新型的侧视图;
18.图3为本实用新型的动作过程图。
具体实施方式
19.如图1
‑
3所示,本实用新型后装垃圾车的提升机构,包括提升驱动机构、提升架3、翻转架2和升降架1,所述提升驱动机构连接提升架3并带动提升架3升降,所述翻转架2的上部通过销轴转动连接于提升架3的顶部,且翻转架2由一驱转机构带动翻转,所述升降架1用于夹持垃圾桶,升降架1沿竖直方向滑动连接于翻转架2上,且升降架1由一升降驱动机构带动升降。
20.所述提升驱动机构包括支座6、提升油缸、一对下摆臂4和一对上摆臂5,所述支座6固定于垃圾车的上装(箱体或填料器等上装)上,一对下摆臂4和一对上摆臂5的一端分别与支座6转动连接,一对下摆臂4和一对上摆臂5的另一端分别与提升架3转动连接,所述提升油缸驱动下摆臂4或上摆臂5旋转。上述结构形成四连杆机构,保证垃圾桶呈竖直状态上升,避免厨余垃圾因垃圾桶倾斜而泄漏。
21.所述翻转架2的两侧上分别设有沿竖直方向设置的滑槽21,所述升降架1上设有滑动连接于对应滑槽21内的滑动件11,其中滑动件11为滑轮或滑块。
22.所述升降架1上部的两侧分别转动连接有支撑臂12,两支撑臂12用于夹持容量为660l的垃圾桶,所述升降架的顶部设有齿板架13,齿板架13上的多个齿板用来夹持容量为240l的垃圾桶。
23.所述驱转机构和升降驱动机构分别为油缸。附图中各油缸均未示出。
24.本提升机构的工作过程如图3所示,可分为三个动作位置,包含了举升,翻转,旋下,下降四个过程:位置1为举升过程的初始位置,此时升降架1已上升,通过齿板架13上的齿板与翻转架2作用,夹紧垃圾桶边沿;同时驱动两侧下摆臂4或上摆臂5,升降架1、翻转架2、提升架3及垃圾桶随四连杆机构动作直至机构提升到位置2,机构由位置1动作至位置2的过程即为举升过程;位置2既是举升过程的终止位置也是翻转过程的起始位置,保持提升架3不动,驱动翻转架2绕销轴旋转动作,待翻转到位置3停止,并停留几秒,待垃圾桶内垃圾倾倒完毕,机构由位置2动作至位置3的过程为翻转过程;由位置3返回位置2过程即为旋下过程,动作与翻转过程相反;由位置2至位置1的过程即为下降过程,动作与举升过程相反。以上四个动作过程构成了本提升机构的一个工作循环。
25.本实用新型中,升降架1与翻转架2通过滑动结构连接,可做竖直方向上的相对运动,将升降架1滑动到最顶部,可以进一步提高垃圾桶的上料高度。而且通过调节升降架1和翻转架2的相对位置,可以适应不同高度的垃圾桶的夹持。
26.上面结合附图对本实用新型的实施加以描述,但是本实用新型不局限于上述的具
体实施方式,上述的具体实施方式是示意性而不是加以局限本实用新型,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1