风力发电机叶片的高空作业系统的制作方法
风力发电机叶片的高空作业系统
【技术领域】
1.本实用新型涉及一种风力发电机的保养和维护系统,具体涉及一种风力发电机叶片的高空作业系统,属于风力发电技术领域。
背景技术:
2.随着对于清洁能源的持续降本增效的需求,风电机组的设计持续向着长叶片和高塔桶的方向发展,在海上和陆上大型风电基地尤其明显。
3.风力发电机包括轮毂,以及多个自中心轮毂延伸的叶片。轮毂可旋转的联接到机舱上,机舱内容纳发电机。叶片被风驱动旋转,进而驱动轮毂和发电机旋转而产生电功率。
4.风电机组叶片需要精确地设计和制造,以便高效地将风能转变成旋转运动,从而为发电机提供足够的旋转能以用于功率产生。叶片效率大体上取决于叶片形状和表面平滑度。不幸的是,在运行期间,碎屑(例如污物、虫子、海盐等)聚集在叶片上,从而改变形状且使平滑度降低。此外,岩石或其它碎片可在接触时刮擦或侵蚀叶片。
5.因此,对叶片的定期检查与清洁可起到保持风力涡轮效率的作用。叶片清洁与检查典型方法是:通过经由从塔架、轮毂或者紧邻地定位的吊车上悬吊,而将人员吊起到各个叶片附近的位置上来手动进行。该人员然后清洁和/或检查叶片,例如,该人员可获得叶片的照片,以便以后进行分析,或者在叶片表面上进行侵蚀测试。然而,手动叶片维护耗时且昂贵,并且需要风机很长时间停机以进行检查,限制了检测质量,对操作人员具有潜在的危险性。
6.因此,为解决上述技术问题,确有必要提供一种创新的风力发电机叶片的高空作业系统,以克服现有技术中的所述缺陷。
技术实现要素:
7.为解决上述问题,本实用新型的目的在于提供一种风力发电机叶片的高空作业系统。
8.为实现上述目的,本实用新型采取的技术方案为:风力发电机叶片的高空作业系统,其用于风机叶片的检查、维护与维修,其包括作业平台;升降装置,所述升降装置安装于作业平台上,并能使作业平台的纵向升降;以及至少一推进装置,所述推进装置连接于作业平台上,用以推动作业平台,使作业平台相对于风机叶片表面运动。
9.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述作业平台的两侧分别装有至少一个推进装置,所述推进装置的推力矢量在水平面的投影矢量具有一夹角,使推进装置的推力矢量能按需合成所需的推力矢量。
10.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述推进装置包括旋翼推进器;所述作业平台的两侧分别固持有悬臂,所述旋翼推进器包括分别安装位于所述悬臂上的第一旋翼推进器,两侧的所述第一旋翼推进器的推力方向呈v型排布。
11.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述旋翼推进器进一步包括分别安装所述悬臂上的第二旋翼推进器,所述第一旋翼推进器位于第二旋翼推进器与作业平台之间,所述第二旋翼推进器提供作业平台的水平偏转扭矩。
12.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:位于所述作业平台两侧的所述第一旋翼推进器分别独立控制,位于所述作业平台两侧的所述第二旋翼推进器分别独立控制。
13.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述推进装置包括旋翼推进器;所述旋翼推进器通过具有旋转关节的旋翼臂与作业平台连接,所述旋转关节提供所述旋翼推进器在至少一个平面内的旋转调节。
14.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述关节包括分别位于旋翼臂两端的第一关节和第二关节,所述第一关节驱动旋翼臂绕第一旋转轴线旋转,第二关节连接所述旋翼推进器并驱动所述旋翼推进器围绕第二旋转轴线旋转,所述第一旋转轴线与所述第二旋转轴线垂直,所述旋翼臂与所述旋翼推进器构成万向矢量推进系统。
15.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统进一步设置为:所述作业平台的安装有至少一对所述旋翼推进器,对称分布于作业平台的两侧。
16.在一个实施例中,本实用新型的风力发电机叶片的高空作业系统还可设置为:所述作业平台上包括一旋转飞轮,所述旋转飞轮枢接于作业平台上,所述飞轮的旋转平面基本垂直于旋翼臂的中心轴线方向。
【附图说明】
17.图1是本实用新型的风力发电机叶片的高空作业系统的使用状态图。
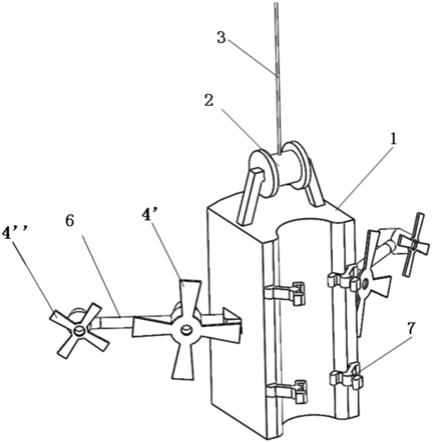
18.图2是本实用新型的风力发电机叶片的高空作业系统的第一实施方式的结构示意图。
19.图3是第一实施方式的受力状态图。
20.图4是本实用新型第一实施方式的作业平台和风机叶片接触时的状态图。
21.图5是本实用新型的第一实施中补充垂直推力旋翼的结构示意图。
22.图6是第一实施方式的控制原理图。
23.图7是本实用新型的第二实施方式的结构示意图。
24.图8a和图8b,图9a和图9b是第二实施方式中的推进装置通过调整旋转关节获取不同方向矢量推力的状态图。
25.图10是图2中的高空作业系统的受力原理图。
26.图11a和图11b是第二实施例的作业平台倾斜前和倾斜后的对比图。
27.图12a和图12b是第二实施例作业平台偏航前和偏航后的对比图。
28.图13是第二实施方式的控制原理图。
29.图14是本实用新型第二实施方式的作业平台和风机叶片接触时的状态图。
30.图15是本实用新型的第三实施方式的结构示意图。
31.图16是本实用新型的风力发电机叶片的高空作业系统的作业流程图。
【具体实施方式】
32.为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
33.根据本申请的一些实施例,本申请提供一种风力发电机叶片的高空作业系统,其用于风机叶片的检查、维护与维修。作业系统包括作业平台;升降装置,所述升降装置安装于作业平台上,并能使作业平台的纵向升降;以及至少一推进装置,所述推进装置连接于作业平台上,用以推动作业平台,使作业平台相对于风机叶片表面运动。
34.实施例1
35.请参阅说明书附图1至附图6所示,其为本实用新型的一种风力发电机叶片的高空作业系统的第一实施方式,其用于风机叶片10的检查、维护与维修,其由作业平台1、升降装置2、以及至少一推进装置4等几部分组成。
36.其中,所述作业平台1上搭载有风机叶片10的检修装置,其能沿风机叶片10表面活动。所述检修装置包括但不限于打磨叶片旋转砂轮、清洁叶片表面的旋转刷、涂敷新保护漆的漆刷、或者识别叶片内的裂缝凹坑的检查装备,检查装备可包括数码摄像机或者超声换能器。
37.所述作业平台1的两侧装有至少一推进装置4,而本实施方式中,推进装置4具体为两个。所述推进装置4的推力矢量在水平面的投影矢量具有一夹角,使推进装置4的推力矢量能按需合成系统所需的推力矢量。
38.在本实施方式中,所述推进装置4包括旋翼推进器4;所述作业平台1的两侧分别固持有悬臂6。所述旋翼推进器4’包括分别安装位于各所述悬臂6的靠近作业平台1的位置安装有上的第一旋翼推进器4’,两侧的所述第一旋翼推进器4’的推力f1、f2方向呈v型排布。
39.进一步的,所述旋翼推进器4进一步包括分别安装所述悬臂6上的第二旋翼推进器4”,所述第一旋翼推进器4’位于第二旋翼推进器4”与作业平台1之间,所述第二旋翼推进器4”提供作业平台1的水平偏转力f3。
40.本实施例中,位于所述作业平台1两侧的所述第一旋翼推进器4’分别独立控制,位于所述作业平台1两侧的所述第二旋翼推进器4”分别独立控制。通过两个大旋翼的第一旋翼推进器4’角度错开合成矢量推力f4,和两个小旋翼的第二旋翼推进器i4’来协同调整作业平台1的偏航方向,并抵消大旋翼的合成力矢量与钢丝绳4拉力f0之间的形成的扭矩。推进装置4的出力响应速度都是在百毫秒级,因此可以为平台1带来足够的稳定度。
41.进一步的,所述作业平台1靠近叶片10侧上安装有抱臂7,所述抱臂7抱于风机叶片10上,避免外界风况突变引起推进装置4的力矩不平衡导致作业平台倾覆。
42.所述升降装置2安装于作业平台1上,并能使作业平台1的纵向升降。在本实施方式中,所述升降装置2包括卷扬机2和悬挂装置3,悬挂装置3连接并卷绕至卷扬机2上。在本实施方式中,所述悬挂装置3具体为一钢丝绳3;所述钢丝绳3一端卷绕至卷扬机2,另一端固定至风力发电机上,或者绕过风力发电机固定于地面上。
43.本实施例的高空作业系统的设计原理如下:
44.首先,两个第一旋翼推进器4’合力f4可以在水平方向上产生受控的推进矢量。已知两个第一旋翼推进器4’水平面方向的合力与吊点提供的拉力的水平分量f0大小相等,方
向相反,而钢丝绳3的拉力只能指向吊点。因此,水平面方向的合力决定了作业平台1相对于吊点的方位,如说明书附图3所示。
45.本实施例在工作时,首先将作业平台1进入稳定悬停时,大旋翼的第一旋翼推进器4’合成矢量f4与钢丝绳3的水平作用力分量f0基本大小相等,方向相反,两台大旋翼的第一推进器4’分担的作用力可以直接进行矢量分解获得。另外,合力的交点与作业平台1的吊点之间存在一定的偏差,这一对大小相等,方向相反的作用力,会产生微弱的使作业平台1旋转力矩。为保证作业平台1保持偏航的姿态不至于偏转,小旋翼的第二旋翼推进器4”产生反向的旋转力f3,第一旋翼推进器4’和第二旋翼推进器4”共同保证作业平台1的空间位置和偏航方向。
46.在本实施方式中,具有大旋翼的第一旋翼推进器4’主要用于产生水平面的推进矢量,而小旋翼的第二旋翼推进器4”用于产生水平面方向的对抗旋转扭矩,维持系统稳定。已知大旋翼对推进器水平面方向的合力,与吊点提供的拉力的水平分量大小相等,方向相反,因此,大旋翼的第一旋翼推进器4’的合力决定了作业平台相对于吊点的位置。此外,小旋翼的第二旋翼推进器4”对可以稳定和控制作业平台的偏航方向,该控制框图如说明书附图6所示。
47.如果确有需要让平台倾斜登登陆叶片表面的情况,可以考虑增加产生垂直水平面方向偏转力矩的旋翼推进器4
”’
,图5是其中一种实现形式,控制策略也易得,此处不做赘述。
48.实施例2
49.请参阅说明书附图7至附图14所示,其为本实用新型的一种风力发电机叶片的高空作业系统的第二实施方式,其和第一实施方式的不同之处在于:所述作业平台1的侧面至少装有一个推进装置4,所述推进装置4包括旋翼推进器。所述旋翼推进器4通过具有旋转关节9的旋翼臂8与作业平台2连接,所述旋转关节9提供所述旋翼推进器4在至少一个平面内的旋转调节。
50.而本实施方式中,所述旋转关节9包括分别位于旋翼臂8两端的第一关节91和第二关节92,所述第一关节91驱动旋翼臂8绕第一旋转轴线旋转,第二关节92连接所述旋翼推进器4并驱动所述旋翼推进器4围绕第二旋转轴线旋转,所述第一旋转轴线与所述第二旋转轴线垂直,所述旋翼臂8与所述旋翼推进器4构成万向矢量推进系统。所述推进装置4通过调整旋转关节9获取不同方向矢量推力的状态图如图8a、图8b和图9a和图9b所示。
51.所述作业平台1上进一步包括一旋转飞轮5。所述旋转飞轮5枢接于作业平台1上,其旋转平面基本垂直于旋翼臂8的中心轴线方向,并根据推进装置4产生的不平衡力矩调整飞轮角动量,进而调整作业平台1在空中的姿态,并能保持作业平台1在空中移动时的姿态稳定,并能保持作业平台1在叶片10表面移动时的稳定。
52.本实施例的两个旋翼推进器4的出力方向和大小完全独立受控。因此可以产生用于拖动作业平台1水平位移的合力。此处由于调整旋翼臂8的旋转关节9转动角度和旋转关节8响应时间都比较长,需要采用旋转飞轮5降低系统的姿态响应速度。采用旋转飞轮5后,可以通过这一对旋翼推进器4产生不同矢量的不平衡力矩,驱动旋转飞轮5改变角动量,进而带动作业平台1缓慢而平稳的偏航,其中垂直方向的不平衡力矩用来改变作业平台1的朝向,水平面方向的不平衡力矩可以让作业平台1倾斜。
53.本实施例的高空作业系统的设计原理如下:
54.首先,两个旋翼推进器4可以产生任意的推进矢量,因此控制自由度较高。已知两个旋翼推进器4水平面方向的合力与吊点提供的拉力的水平分量大小相等,方向相反,而吊绳的拉力只能指向吊点。因此,水平面方向的合力决定了作业平台相对于吊点的方位,如说明书附图10所示。
55.其次,旋转飞轮5根据陀螺的进动原理,可以知道在水平面方向的一对相反作用力产生的旋转力矩可以使得作业平台倾斜,如说明书附图11a和11b所示。
56.再次,旋转飞轮5依据陀螺的进动原理,可以知道垂直平面方向的一对相反作用力产生的旋转力矩可以使得作业平台1偏航,如说明书附图12a和12b所示。
57.因此,依据以上三个特性,设定好吊线飞行器的位置,倾斜姿态,偏航角度就可以对应的计算出两台旋翼推进器需要产生的作用力大小和方向,其控制框图如附图13所示。
58.实施例3
59.请参阅说明书附图15所示,其为本实用新型的一种风力发电机叶片的高空作业系统的第二实施方式,其和第一实施方式的不同之处在于:其作业平台1的单侧通过旋转关节9连接有旋翼臂8,使旋翼臂8能旋转.
60.本实施方式中的其他结构和第二实施方式相同,故,在此不再赘述。
61.本实施方式的作业平台1在地面起吊后,先不急于抵达预定的,叶片着陆位置的高度,先通过悬挂装置3和旋翼推进器4组成不平衡力矩,改变工作平台1的偏航方向,例如,可以使用旋翼推进器4的旋翼垂直方向的作用力,驱动飞轮5偏航,可以使用旋翼水平方向作用力,驱动飞轮5倾斜。完成平台1着陆前的姿态调整后,再快速地用旋翼推进器4拖曳平台1靠近并着陆于叶片10表面,这期间的平台1偏航方向和倾斜角等姿态被飞轮5的惯性保持基本不变。通过时间上的切分,保证一部旋翼推进器4也可以实现垂直于指定的叶片10表面位置着陆。
62.本实用新型的风力发电机叶片的高空作业系统中的工作能源可以采用自带的电池供给。同时考虑到作业平台1的作业空间有限,可以从风力发电机塔底通过管线供给多种能源和物质,电能,气动能,以及清洗用水和喷砂等。塔底因此可以部署电源,气泵站,高压水泵站等辅助设施9。
63.本实用新型的风力发电机叶片的高空作业系统的作业方法如说明书附图16所示,其包括如下步骤:
64.1),将叶片10定位在基本垂直于地面的位置;
65.2),将作业平台1放置在地面,通过作业平台1上的升降装置2向上提升作业平台1,在作业平台1提升过程中,通过控制旋翼推进器4以调节作业平台与叶片之间的距离,至作业平台与叶片的前缘接触;
66.3),在正确的工作位置贴合后,抱臂61稳定作业平台1,同时驱动旋翼推进器4拖曳作业平台1,以产生作业平台工作1所需的对于叶片10表面的贴合压力。
67.在一个实施例中,作业方法进一步包括控制旋翼推进器4,使作业平台远离叶片,并通过升降装置2调节作业平台相对于叶片的高度。
68.本实用新型的风力发电机叶片的高空作业系统的作业方法的进其他改进可参照前面对高空作业系统及其各部件的结构、关系及相应技术效果的说明,在此不另作赘述。
69.与现有技术相比,本实用新型的实施例具有如下有益效果:
70.1.本实用新型的风力发电机叶片的高空作业系统同时具备大载重能力和空间移动的灵活性和平稳性,可以支持绝大部分风力发电机叶片的检查,检修,维护工作。
71.2.本实用新型的风力发电机叶片的高空作业系统无需地面导引绳的支援,从而扩大了自动作业平台的地形适用范围,降低了维护成本,有利于更频繁的清洁检查和维护操作。
72.3.本实用新型的风力发电机叶片的高空作业系统采用旋翼推进器产生反作用力,在空中平稳移动,结合更多的旋翼或者飞轮,可以调整偏航和倾斜姿态,平稳地与叶片的任意表面对接,即作业平台可以基本垂直地着陆于叶片的任意表面。
73.4.本实用新型支持绝大部分风力发电机的叶片检修维护操作,几乎不受地形限制,安全性好,自动化程度高,无需长时间停止风电机组,并能避免因叶片的检查维护不及时带来的叶片的永久性损伤和风电机组的发电效率下降,特别适用于复杂山地和海上环境。
74.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
75.以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1