一种电线自动捆绑机器的制作方法
1.本发明涉及电线捆绑机器技术领域,特别涉及一种电线自动捆绑机器。
背景技术:
2.随着社会经济的不断发展,各行各业也在不断的进步,拿电线捆扎方面来说,传统的捆扎,工作效率低下,而且容易浪费材料,捆扎的效果不佳,容易脱落,当电线较多时,不方便捆扎,费事费力,为了解决市面上的电线捆扎装置所存在的缺点与不足,目前急需改善电线捆扎的技术,使之更加便捷的供人们使用,提高电线捆扎工作效率。
技术实现要素:
3.针对上述技术问题,本发明提供了一种电线自动捆绑机器,解决了普通扎线装置容易活络甚至脱落,影响扎紧,同时扎线的工作效率低下,浪费材料的问题。
4.本发明所使用的技术方案是:一种电线自动捆绑机器,包括:包线部分、缠绕部分;包线部分可以飞在空中将电线聚拢起来;缠绕部分安装在包线部分上,缠绕部分可以将散开的电线绑在一起。
5.优选的,所述的包线部分包括:无人机、圆弧架、圆弧块、机械爪、方形底座、卷线盘、y形板;所述的无人机上设有螺旋桨;圆弧架固定安装在无人机底部的凹槽内,圆弧架内部设有凹槽,圆弧架内部设有弧形凸柱;圆弧块滑动安装在圆弧架内部的凹槽中,圆弧块中间设有凹槽,圆弧块中间的凹槽套在圆弧架内部的弧形凸柱上,圆弧块一侧设有螺纹;机械爪有两个,机械爪固定安装在圆弧块顶部的凹槽中;方形底座固定安装在圆弧架上;卷线盘中间的圆轴转动安装在方形底座支架上的圆孔内;y形板固定安装在无人机底部的凹槽中,y形板上设有多个圆孔。
6.优选的,所述的包线部分还包括:伺服电机a、皮带轮锥齿轮齿轮组、皮带轮组、同步带a、弧形轮、皮带轮齿轮组;所述的伺服电机a固定安装在圆弧架内部的凹槽中,伺服电机a电机轴上固定连接有一个锥齿轮;皮带轮锥齿轮齿轮组转动安装在圆弧架内部的轴上,皮带轮锥齿轮齿轮组内锥齿轮与伺服电机a电机轴上的锥齿轮互相啮合,皮带轮锥齿轮齿轮组内齿轮与圆弧块上的锯齿互相啮合;皮带轮组有两组,分别转动安装在圆弧架内部的轴上;同步带a有多根,同步带a包覆皮带轮锥齿轮齿轮组内皮带轮和其中一个皮带轮组内的其中一个皮带轮,同步带a包覆两个皮带轮组内的其中一个皮带轮,同步带a包覆另外一个皮带轮组内的其中一个皮带轮和皮带轮齿轮组内的皮带轮;弧形轮有两个,分别转动安装在方形底座上的凹槽内,弧形轮夹住绑丝防止绑丝脱落;皮带轮齿轮组转动安装在圆弧架内部的轴上,皮带轮齿轮组内的齿轮与圆弧块上的锯齿互相啮合。
7.优选的,所述的缠绕部分包括:带齿圆柱、圆盘齿轮、同步电机、皮带轮a、螺纹杆a、同步带b;所述的带齿圆柱有四个,带齿圆柱的轴分别转动安装在y形板上的圆孔内,带齿圆柱内部设有锯齿,锯齿与圆盘齿轮上的锯齿互相啮合;圆盘齿轮转动安装在四个带齿圆柱中间;同步电机有两个,分别固定安装在圆盘齿轮上的平板上;皮带轮a有两个,分别固定安
装在两个同步电机上的电机轴上;螺纹杆a有两根,分别转动安装在圆盘齿轮上平板上的圆孔内,螺纹杆a上设有螺纹,螺纹杆a顶部固定连接有一个皮带轮;同步带b有两根;同步带b包覆皮带轮a和螺纹杆a上的皮带轮。
8.优选的,所述的缠绕部分还包括:圆柱滑块、伺服电机b、螺纹杆b、金属杆、螺纹块、夹头;所述的圆柱滑块有两个,分别滑动安装在圆盘齿轮上的滑槽内,圆柱滑块上设有两个圆孔,其中一个圆孔内设有螺纹,螺纹与螺纹杆a上的螺纹配合;伺服电机b有两个,分别固定安装在两个圆柱滑块上,伺服电机b电机轴上固定连接有一个皮带轮;螺纹杆b有两根,分别转动安装在两个圆柱滑块上的圆孔内,螺纹杆b上设有螺纹;金属杆有四根,其中两根一端圆轴转动安装在其中一个圆柱滑块两侧的圆孔内,另外两根一端圆轴转动安装在另外一个圆柱滑块两侧的圆孔内;螺纹块有两个,其中一个螺纹块两端圆轴与其中两根夹头中间的圆孔转动连接,另外一个螺纹块两端圆轴与另外两根夹头中间的圆孔转动连接,螺纹块中间设有螺纹孔,螺纹孔内螺纹与螺纹杆b上的螺纹配合;夹头有四根,其中两根夹头一端的圆轴与其中两根金属杆一端的圆孔转动连接,另外两根夹头一端的圆轴与另外两根金属杆一端的圆孔转动连接。
9.优选的,所述的缠绕部分还包括:伺服电机c、锥齿轮皮带轮组、皮带轮b、同步带c、同步带d;所述的伺服电机c固定安装在y形板上,伺服电机c电机轴上固定连接有一个锥齿轮;锥齿轮皮带轮组固定安装在在其中一个带齿圆柱上的轴上,锥齿轮皮带轮组内锥齿轮与伺服电机c电机轴上的锥齿轮互相啮合;皮带轮b有两组,分别固定安装在其中两个带齿圆柱上的轴上;同步带c有两根,同步带c包覆锥齿轮皮带轮组内皮带轮和其中一组皮带轮b内的其中一个皮带轮,同步带c包覆两个皮带轮b内的皮带轮;同步带d有两根,同步带d包覆螺纹杆b一端的凹槽和伺服电机b电机轴上的皮带轮。
10.本发明与现有技术相比的有益效果是:1.通过伺服电机c驱动带着圆盘齿轮带着圆柱滑块转动,圆柱滑块带着夹头转动来将电线绑住,实现了自动化捆绑电线的功能,提高了工作效率。
11.2.通过伺服电机a驱动带着皮带轮齿轮组带着圆弧块向外滑动来将电线聚在一起,通过机械爪工作来将卷线盘内的绑丝夹住并移动到电箱旁边,实现了自动化聚拢电线的功能。
12.3.通过机器上空中捆绑电线,提高了捆绑电线的效率,也避免了人工捆绑电线造成触电的危险。
附图说明
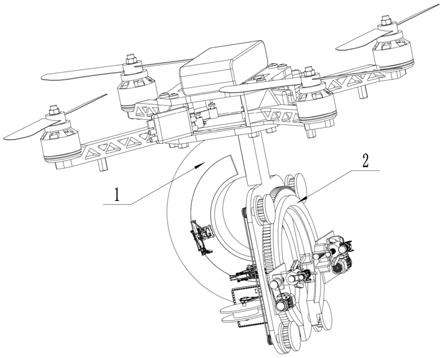
13.图1、图2为本发明的整体结构示意图。
14.图3
‑
5为本发明包线部分结构示意图。
15.图6
‑
8为本发明缠绕部分结构示意图。
16.附图标号:1
‑
包线部分;2
‑
缠绕部分;101
‑
无人机;102
‑
圆弧架;103
‑
圆弧块;104
‑
机械爪;105
‑
方形底座;106
‑
卷线盘;107
‑
y形板;108
‑
伺服电机a;109
‑
皮带轮锥齿轮齿轮组;110
‑
皮带轮组;111
‑
同步带a;112
‑
弧形轮;113
‑
皮带轮齿轮组;201
‑
带齿圆柱;202
‑
圆盘齿轮;203
‑
同步电机;204
‑
皮带轮a;205
‑
螺纹杆a;206
‑
同步带b;207
‑
圆柱滑块;208
‑
伺服电机b;209
‑
螺纹杆b;210
‑
金属杆;211
‑
螺纹块;212
‑
夹头;213
‑
伺服电机c;214
‑
锥齿轮皮带轮
组;215
‑
皮带轮b;216
‑
同步带c;217
‑
同步带d。
具体实施方式
17.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员能够在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
18.在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.请参阅图1
‑
8所示,一种电线自动捆绑机器,包括:包线部分1、缠绕部分2;包线部分1可以飞在空中将电线聚拢起来;缠绕部分2安装在包线部分1上,缠绕部分2可以将散开的电线绑在一起,通过包线部分1和缠绕部分2相互配合可以实现快速,高质量的将电线捆绑在一起,方便了高空作业的捆绑电线。
20.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,包线部分1包括:无人机101、圆弧架102、圆弧块103、机械爪104、方形底座105、卷线盘106、y形板107;无人机101上设有螺旋桨,所述通过螺旋桨来带动整个机器飞行移动;圆弧架102固定安装在无人机101底部的凹槽内,圆弧架102内部设有凹槽,圆弧架102内部设有弧形凸柱;圆弧块103滑动安装在圆弧架102内部的凹槽中,圆弧块103中间设有凹槽,圆弧块103中间的凹槽套在圆弧架102内部的弧形凸柱上,圆弧块103一侧设有螺纹;机械爪104有两个,机械爪104固定安装在圆弧块103顶部的凹槽中,通过机械爪104工作来将卷线盘106内的绑丝夹住并移动到电箱旁边;方形底座105固定安装在圆弧架102上;卷线盘106中间的圆轴转动安装在方形底座105支架上的圆孔内,卷线盘106上面缠绕有的绑丝;y形板107固定安装在无人机101底部的凹槽中,y形板107上设有多个圆孔。
21.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,包线部分1还包括:伺服电机a108、皮带轮锥齿轮齿轮组109、皮带轮组110、同步带a111、弧形轮112、皮带轮齿轮组113;伺服电机a108固定安装在圆弧架102内部的凹槽中,伺服电机a108电机轴上固定连接有一个锥齿轮,伺服电机a108提供动力;皮带轮锥齿轮齿轮组109转动安装在圆弧架102内部的轴上,皮带轮锥齿轮齿轮组109内锥齿轮与伺服电机a108电机轴上的锥齿轮互相啮合,皮带轮锥齿轮齿轮组109内齿轮与圆弧块103上的锯齿互相啮合;皮带轮组110有两组,分别转动安装在圆弧架102内部的轴上;同步带a111有多根,同步带a111包覆皮带轮锥齿轮齿轮组109内皮带轮和其中一个皮带轮组110内的其中一个皮带轮,同步带a111包覆两个皮带轮组110内的其中一个皮带轮,同步带a111包覆另外一个皮带轮组110内的其中一个皮带轮和皮带轮齿轮组113内的皮带轮;具体的皮带轮齿轮组113、皮带轮组110和皮带轮锥齿轮齿轮组109通过同步带a111连接,弧形轮112有两个,分别转动安装在方形底座105上的凹槽内,弧形轮112夹住绑丝防止绑丝脱落;皮带轮齿轮组113转动安装在圆弧架102内部的轴上,皮带轮齿轮组113内的齿轮与圆弧块103上的锯齿互相啮合;具体地,通过将绑丝卷在卷线盘106上,无人机101工作带着设备飞到电线旁,通过伺服电机a108驱动
带着皮带轮锥齿轮齿轮组109转动,皮带轮锥齿轮齿轮组109通过同步带a111带着皮带轮组110转动,皮带轮组110通过同步带a111带着皮带轮齿轮组113转动,皮带轮齿轮组113带着圆弧块103向外滑动来将电线聚在一起,通过机械爪104工作来将卷线盘106内的绑丝夹住并移动到电箱旁边,实现了自动化聚拢电线的功能。
22.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,缠绕部分2包括:带齿圆柱201、圆盘齿轮202、同步电机203、皮带轮a204、螺纹杆a205、同步带b206;带齿圆柱201有四个,带齿圆柱201的轴分别转动安装在y形板107上的圆孔内,带齿圆柱201内部设有锯齿,锯齿与圆盘齿轮202上的锯齿互相啮合;圆盘齿轮202转动安装在四个带齿圆柱201中间;同步电机203有两个,分别固定安装在圆盘齿轮202上的平板上,同步电机203用于带动同步带b206;皮带轮a204有两个,分别固定安装在两个同步电机203上的电机轴上;螺纹杆a205有两根,分别转动安装在圆盘齿轮202上平板上的圆孔内,螺纹杆a205上设有螺纹,螺纹杆a205顶部固定连接有一个皮带轮;同步带b206有两根;同步带b206包覆皮带轮a204和螺纹杆a205上的皮带轮;所述螺纹杆a205采用hrb400制成。
23.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,缠绕部分2还包括:圆柱滑块207、伺服电机b208、螺纹杆b209、金属杆210、螺纹块211、夹头212;圆柱滑块207有两个,分别滑动安装在圆盘齿轮202上的滑槽内,圆柱滑块207上设有两个圆孔,其中一个圆孔内设有螺纹,螺纹与螺纹杆a205上的螺纹配合;伺服电机b208有两个,分别固定安装在两个圆柱滑块207上,伺服电机b208电机轴上固定连接有一个皮带轮,所述伺服电机b208型号为tms060040aa11;螺纹杆b209有两根,分别转动安装在两个圆柱滑块207上的圆孔内,螺纹杆b209上设有螺纹;金属杆210有四根,其中两根一端圆轴转动安装在其中一个圆柱滑块207两侧的圆孔内,另外两根一端圆轴转动安装在另外一个圆柱滑块207两侧的圆孔内;螺纹块211有两个,其中一个螺纹块211两端圆轴与其中两根夹头212中间的圆孔转动连接,另外一个螺纹块211两端圆轴与另外两根夹头212中间的圆孔转动连接,螺纹块211中间设有螺纹孔,螺纹孔内螺纹与螺纹杆b209上的螺纹配合;夹头212有四根,其中两根夹头212一端的圆轴与其中两根金属杆210一端的圆孔转动连接,另外两根夹头212一端的圆轴与另外两根金属杆210一端的圆孔转动连接;所述通过螺纹块211上下,通过金属杆210和夹头212转动,进而控制两个夹头212进行夹紧。
24.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,缠绕部分2还包括:伺服电机c213、锥齿轮皮带轮组214、皮带轮b215、同步带c216、同步带d217;伺服电机c213固定安装在y形板107上,伺服电机c213电机轴上固定连接有一个锥齿轮;锥齿轮皮带轮组214固定安装在在其中一个带齿圆柱201上的轴上,锥齿轮皮带轮组214内锥齿轮与伺服电机c213电机轴上的锥齿轮互相啮合;皮带轮b215有两组,分别固定安装在其中两个带齿圆柱201上的轴上;同步带c216有两根,同步带c216包覆锥齿轮皮带轮组214内皮带轮和其中一组皮带轮b215内的其中一个皮带轮,同步带c216包覆两个皮带轮b215内的皮带轮;同步带d217有两根,同步带d217包覆螺纹杆b209一端的凹槽和伺服电机b208电机轴上的皮带轮;具体地,由伺服电机b208驱动通过同步带d217带着螺纹杆b209转动,螺纹杆b209带着螺纹块211滑动,螺纹块211带着夹头212将绑丝夹住,通过同步电机203驱动带着皮带轮a204转动,皮带轮a204通过同步带b206带着螺纹杆a205转动,螺纹杆a205带着圆柱滑块207滑动,圆柱滑块207带着夹头212滑动来将绑丝绷直,接着通过伺服电机c213驱动带
着锥齿轮皮带轮组214转动,锥齿轮皮带轮组214带着带齿圆柱201转动,锥齿轮皮带轮组214通过同步带c216带着皮带轮b215转动,皮带轮b215带着带齿圆柱201转动,带齿圆柱201带着圆盘齿轮202转动,圆盘齿轮202带着圆柱滑块207转动,圆柱滑块207带着夹头212转动来将电线绑住,实现了自动化捆绑电线的功能,提高了工作效率。
25.工作原理:首先将绑丝安装在卷线盘106内,通过无人机101工作带着设备飞到电线旁,通过伺服电机a108驱动带着皮带轮锥齿轮齿轮组109转动,皮带轮锥齿轮齿轮组109通过同步带a111带着皮带轮组110转动,皮带轮组110通过同步带a111带着皮带轮齿轮组113转动,皮带轮齿轮组113带着圆弧块103向外滑动来将电线聚在一起,通过机械爪104工作来将卷线盘106内的绑丝夹住并移动到电箱旁边;接着通过伺服电机b208驱动通过同步带d217带着螺纹杆b209转动,螺纹杆b209带着螺纹块211滑动,螺纹块211带着夹头212将绑丝夹住,通过同步电机203驱动带着皮带轮a204转动,皮带轮a204通过同步带b206带着螺纹杆a205转动,螺纹杆a205带着圆柱滑块207滑动,圆柱滑块207带着夹头212滑动来将绑丝绷直,接着通过伺服电机c213驱动带着锥齿轮皮带轮组214转动,锥齿轮皮带轮组214带着带齿圆柱201转动,锥齿轮皮带轮组214通过同步带c216带着皮带轮b215转动,皮带轮b215带着带齿圆柱201转动,带齿圆柱201带着圆盘齿轮202转动,圆盘齿轮202带着圆柱滑块207转动,圆柱滑块207带着夹头212转动来将电线绑住,实现了自动化捆绑电线的功能,提高了工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1