高稳定性安全型电动葫芦的制作方法
1.本技术涉及电动葫芦的领域,尤其是涉及一种高稳定性安全型电动葫芦。
背景技术:
2.电动葫芦是一种特起重设备,安装在天车、龙门吊之上,电动葫芦具有体积小,自重轻,操作简单,使用方便等特点,用于工矿企业,仓储,码头等场所。
3.电动葫芦结构紧凑,电机轴线垂直于卷筒轴线的电动葫芦采用蜗轮传动装置。其缺点为:长度尺寸大,宽度方面尺寸大,结构粗笨,机械效率低,加工较难等。液压系统为双重控制,溢流调节阀、磁接点压力表均可对压力进行精确的控制。电器控制部门采用了低电压控制,增加了支配系统的安全性。
4.公告号为cn105293278a的发明专利公开了一种电动葫芦式双轨单主梁起重机,它包括主梁,主梁的顶部焊接有上翼板,上翼板的下面焊接有腹板,腹板的下端设置有行车轨道,上翼板和腹板之间焊接有上翼板加强板,上翼板加强板和腹板之间焊接有腹板加强筋板,主梁的内部安装有电动葫芦,电动葫芦连接有电动葫芦底座,电动葫芦底座的下部连接有小车架,小车架安装有行走装置,行走装置的内部安装有行车轮,行车轮连接有驱动电动机,电动葫芦连接有滑轮组,滑轮组连接有吊钩,小车架的前后两端安装有缓冲装置,主梁的前后两端的下部设置有限位装置。
5.上述的相关技术方案存在以下缺陷:相关技术的电动葫芦在起步运行时,吊钩上的重物会由于惯性作用朝向与行走装置运动方向相反的一侧荡去,如果重物的晃动幅度过大,会导致重物从吊钩上脱落。
技术实现要素:
6.为了减小电动葫芦上重物的晃动幅度,本技术提供一种高稳定性安全型电动葫芦。
7.本技术提供的一种高稳定性安全型电动葫芦采用如下的技术方案:一种高稳定性安全型电动葫芦,包括电动葫芦本体和吊钩,所述电动葫芦本体设有升降电机,所述电动葫芦本体下方设有与升降电机连接的两根提拉钢缆,所述提拉钢缆远离升降电机的一端共同固定在吊钩上,还包括辅助稳定装置,所述辅助稳定装置包括两个驱动件一和两根抵接杆,两根抵接杆分别与两根提拉钢缆一一对应,所述电动葫芦本体下方设有安装座,两根提拉钢缆分别穿设并活动连接在安装座上,所述抵接杆的一端滑动连接在安装座上,所述抵接杆的另一端位于安装座下方并朝向对应提拉钢缆设置,所述抵接杆远离安装座的端部位于两条提拉钢缆之间,两个驱动件一分别与两个抵接杆一一对应,当提拉钢缆朝向一侧晃动时,所述驱动件一驱动相应抵接杆朝向远离提拉钢缆晃动的一侧方向移动并抵接在提拉钢缆上。
8.通过采用上述技术方案,当提拉钢缆朝向一侧晃动时,驱动件一会驱动相应的抵接杆朝向远离提拉钢缆晃动的一侧方向移动并抵接在提拉钢缆上,能够阻止提拉钢缆继续
朝向那一侧晃动,能够减小提拉钢缆的晃动幅度,使吊钩上的重物不易从吊钩上掉落。
9.优选的,所述驱动件一包括第一齿条、第二齿条、第一齿轮和弹簧,所述第一齿条滑动连接在安装座上,所述弹簧设置在安装座上并驱动第一齿条朝向对应提拉钢缆的一侧滑动,所述第二齿条沿平行于对应抵接杆的长度方向固定在对应抵接杆上,所述第一齿轮转动连接在安装座上,所述第一齿轮的轴线方向垂直于提拉钢缆的长度方向,所述第一齿条与第二齿条分别位于对应第一齿轮的上下两侧并啮合连接在对应第一齿轮上,所述第一齿条的一端靠近对应提拉钢缆设置,当提拉钢缆朝向第一齿条一侧晃动时,所述提拉钢缆先抵接并驱动对应第一齿条滑动。
10.通过采用上述技术方案,通过提拉钢缆晃动从而抵接在第一齿条上并驱动第一齿条移动,第一齿条通过对应第一齿轮转动带动第二齿条朝向对应提拉钢缆一侧移动,从而第一齿条与抵接杆共同抵接在提拉钢缆上,整个过程中提拉钢缆的晃动经过第一齿条与抵接杆的两次减速,从而能够达到更好的减速效果。
11.优选的,所述抵接杆远离安装座的一端转动连接有滚轮,所述滚轮的轴线方向平行于第一齿轮的轴线方向。
12.通过采用上述技术方案,滚轮能够减小提拉钢缆与抵接杆之间的摩擦,从而降低抵接杆对提拉钢缆的伤害。
13.优选的,还包括分析仪、驱动件二和两个压力传感器,两个压力传感器分别正对于两条提拉钢缆并设置在安装座内,两个压力传感器分别位于两条提拉钢缆的两侧,所述驱动件二驱动两个抵接杆分别朝向对应两条提拉钢缆一侧运动至滚轮抵接在对应提拉钢缆上,两条提拉钢缆相互远离的一侧侧面分别抵接在两个压力传感器上,所述压力传感器用来检测提拉钢缆在收卷过程中的压力变化,所述分析仪用来接收压力传感器检测的压力变化从而初步判断提拉钢缆是否出现损坏。
14.通过采用上述技术方案,当提拉钢缆收卷时,驱动件二驱动两个抵接杆分别朝向对应两条提拉钢缆一侧运动至滚轮抵接在对应提拉钢缆上,从而能够使位于压力传感器的这部分提拉钢缆完全抵接在压力传感器上并处于拉伸状态,损坏的提拉钢缆可能会出现打结或者提拉钢缆部分断裂的情况,这时提拉钢缆经过滚轮时的粗细会发生变化,从而导致提拉钢缆抵接在压力传感器上的倾斜角度发生变化,从而导致压力传感器受到的压力出现变化,从而分析仪能够通过这部分压力变化初步判断提拉钢缆是否出现损坏。
15.优选的,当电动葫芦本体以及提拉钢缆处于静止稳定状态时,所述抵接杆与提拉钢缆之间留有一段距离。
16.通过采用上述技术方案,当提拉钢缆处于正常状态下向下放下时,提拉钢缆不易与抵接杆触碰,从而减小提拉钢缆与抵接杆之间的摩擦,对提拉钢缆起到保护作用。
17.优选的,所述压力传感器上设有连接杆,所述连接杆的一端固定在压力传感器上,所述连接杆的另一端固定有传感块,所述传感块远离连接杆的一侧侧面转动连接有若干滑轮,所述滑轮的轴线方向平行于滚轮的轴线方向,当两个抵接杆分别抵接在对应提拉钢缆上时,所述提拉钢缆抵接在若干滑轮上。
18.通过采用上述技术方案,连接杆能够减小与压力传感器的接触面积,从而使压力测量的结果更加精确。
19.优选的,所述驱动件二包括第一电机、双面齿条和第二齿轮,所述第一电机设置在
安装座内,所述第一电机的输出轴与第二齿轮同轴固定连接,所述双面齿条滑动连接在安装座内,两个第一齿轮分别位于双面齿条的两侧并与双面齿条啮合连接,所述第二齿轮啮合连接在双面齿条的其中一侧侧面。
20.通过采用上述技术方案,通过第一电机的输出轴转动,使第二齿轮带动双面齿条在安装座上滑动,从而带动两个第一齿轮分别朝向相反的方向转动,从而使两个抵接杆分别朝向相互远离的一侧移动至抵接在提拉钢缆上。
21.优选的,当电动葫芦本体处于静止稳定状态时,所述第一齿条的长度方向垂直于对应提拉钢缆的长度方向。
22.通过采用上述技术方案,能够使提拉钢缆更好的抵接在第一齿条上并驱动第一齿条进行运动。
23.综上所述,本技术包括以下至少一种有益技术效果:通过设置驱动件一和抵接杆,当提拉钢缆朝向一侧晃动时,驱动件一会驱动相应的抵接杆朝向远离提拉钢缆晃动的一侧方向移动并抵接在提拉钢缆上,能够阻止提拉钢缆继续朝向那一侧晃动,能够减小提拉钢缆的晃动幅度,使吊钩上的重物不易从吊钩上掉落;通过设置连接杆,连接杆能够减小与压力传感器的接触面积,从而使压力测量的结果更加精确。
附图说明
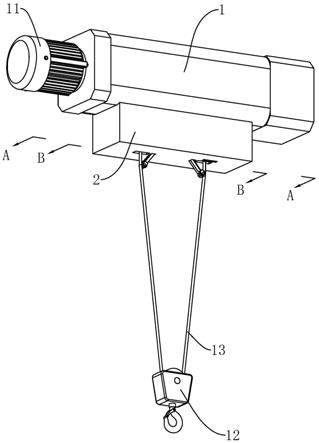
24.图1是本技术实施例的整体结构示意图。
25.图2是沿图1中a
‑
a线的局部剖视图。
26.图3是沿图1中b
‑
b线的剖视图。
27.图4是本技术实施例提拉钢缆收卷状态时的结构示意图。
28.附图标记说明:1、电动葫芦本体;11、升降电机;12、吊钩;13、提拉钢缆;14、限位环;2、安装座;21、伸出通槽;211、滑动槽;2111、第一槽;212、第二槽;213、压力传感器;214、连接杆;215、传感块;2151、滑轮;216、倾斜面;3、辅助稳定装置;31、抵接杆;311、滚轮;32、驱动件一;321、第一齿条;3211、第一块;322、第二齿条;323、第一齿轮;324、弹簧;33、驱动件二;331、双面齿条;332、第二齿轮;34、第一电机。
具体实施方式
29.以下结合附图1
‑
4对本技术作进一步详细说明。
30.本技术实施例公开一种高稳定性安全型电动葫芦。
31.参照图1、图2,本实施例的高稳定性安全型电动葫芦包括电动葫芦本体1、升降电机11和用来吊挂重物的吊钩12,升降电机11固定连接在电动葫芦本体1长度方向的一端外端面上,升降电机11的输出轴呈水平设置并伸入电动葫芦本体1内,升降电机11的输出轴转动连接在电动葫芦本体1内。升降电机11的输出轴上绕卷有两条提拉钢缆13,两条提拉钢缆13分别位于升降电机11输出轴的两端,两条提拉钢缆13的底端从电动葫芦本体1的正下方伸出并共同固定连接在吊钩12上。为了限制两条提拉钢缆13在升降电机11输出轴上的位置,升降电机11输出轴上同轴套设有两组限位环14,两组限位环14分别位于升降电机11输出轴的两端,两组限位环14与两条提拉钢缆13一一对应,每组限位环14包括两个限位环14,
提拉钢缆13绕卷在升降电机11输出轴上的一端始终位于对应两个限位环14之间。电动葫芦本体1在外置天车上的移动方向平行于电动葫芦本体1的长度方向。
32.参照图1、图2,电动葫芦本体1上连接有辅助稳定装置3,辅助稳定装置3包括两个驱动件一32和两根抵接杆31。电动葫芦本体1底面上固定连接有安装座2,安装座2的长度方向平行于电动葫芦本体1的长度方向,安装座2上开设有上下两端连通的两个伸出通槽21,两条提拉钢缆13分别穿设并活动连接在两个伸出通槽21上,当电动葫芦本体1以及提拉钢缆13处于静止状态时,两个伸出通槽21相互靠近的一端开设有与对应提拉钢缆13斜度匹配的倾斜面216。两根抵接杆31分别与两根提拉钢缆13一一对应,两条抵接杆31位于两条提拉钢缆13之间并分别靠近两条提拉钢缆13设置,抵接杆31的一端滑动连接在安装座2上,抵接杆31的另一端位于安装座2下方并朝向对应提拉钢缆13设置。两个驱动件一32分别与两个抵接杆31一一对应,当提拉钢缆13朝向一侧晃动时,驱动件一32驱动相应抵接杆31朝向远离提拉钢缆13晃动的一侧方向移动并抵接在提拉钢缆13上。
33.参照图1、图2,驱动件一32包括第一齿条321、第二齿条322、第一齿轮323和弹簧324,两个伸出通槽21相互远离的一侧侧面上分别开设有滑动槽211,两个滑动槽211相互远离的一端低于两个滑动槽211相互靠近的一端。两个第一齿条321分别滑动连接在两条滑动槽211上,第一齿条321沿对应滑动槽211的长度方向滑动连接在对应滑动槽211上,两个第二齿条322分别固定连接在两条抵接杆31的顶面,第二齿条322的长度方向平行于抵接杆31的长度方向。第一齿轮323转动连接在安装座2上,第一齿轮323的轴线方向呈水平设置并平行于安装座2的厚度方向,第一齿轮323位于对应抵接杆31与对应第一齿条321之间并分别与第一齿条321与第二齿条322啮合连接。
34.参照图1、图2,滑动槽211顶端开设有第一槽2111,第一槽2111的长度方向平行于滑动槽211的长度方向,第一齿条321顶面上固定有第一块3211,第一块3211沿平行于第一槽2111的长度方向滑动连接在第一槽2111内,弹簧324的两端分别固定在第一槽2111远离对应提拉钢缆13的一端端壁上以及第一块3211远离对应提拉钢缆13的一侧侧壁上。弹簧324始终处于压缩状态,当没有外力作用在第一齿条321上时,第一齿条321在弹簧324的作用下移动至第一块3211抵接在第一槽2111远离弹簧324的一端端壁上,此时两个第一齿条321相互远离的一端延伸至分别靠近两条提拉钢缆13,并且此时第一齿条321以及抵接杆31与提拉钢缆13之间均留有一段距离。当两条提拉钢缆13同时朝向一侧晃动时,其中一条提拉钢缆13会先抵接在相近第一齿条321上,然后驱动第一齿条321克服弹簧324的弹力朝向滑动槽211底壁一侧运动,此时第一齿条321通过第一齿轮323带动第二齿条322朝向对应提拉钢缆13一侧滑动,从而带动抵接杆31抵接在对应提拉钢缆13上,整个过程中提拉钢缆13的晃动经过第一齿条321与抵接杆31的两次减速,从而能够达到更好的降低晃动幅度的效果,使吊钩12上的重物不易从吊钩12上掉落。
35.参照图1、图2,为了使提拉钢缆13能够更好的推动第一齿条321,当电动葫芦本体1处于静止稳定状态时,第一齿条321的长度方向垂直于对应提拉钢缆13的长度方向。
36.参照图1、图2,抵接杆31远离安装座2的端部转动连接有滚轮311,滚轮311的轴线方向平行于第一齿轮323的轴线方向。
37.参照图1、图2,两个伸出通槽21相互远离的倾斜面216上垂直开设有第二槽212,第二槽212底壁上固定连接有压力传感器213,压力传感器213远离第二槽212底壁的一侧侧面
中心固定连接有连接杆214,连接杆214的一端固定在压力传感器213上,连接杆214的另一端固定连接有传感块215。传感块215的长度方向平行于倾斜面216的倾斜方向,传感块215的一部分固定并位于第二槽212内,传感块215的另一部分伸出第二槽212,传感块215远离压力传感器213的一侧侧面转动连接有多个滑轮2151,多个滑轮2151沿传感块215的长度方向均匀分布在第二块上,滑轮2151的轴线方向平行于第一齿轮323的轴线方向。
38.参照图2、图3,安装座2上连接有驱动件二33,驱动件二33驱动两个抵接杆31分别朝向对应两条提拉钢缆13一侧运动至多个滚轮311共同抵接在对应提拉钢缆13上,此时两条提拉钢缆13相互远离的一侧侧面分别抵接在两个压力传感器213上。安装座2上连接有分析仪,压力传感器213用来检测提拉钢缆13在收卷过程中的压力变化,分析仪用来接收压力传感器213检测的压力变化从而初步判断提拉钢缆13是否出现损坏。
39.参照图4,当提拉钢缆13收卷时,驱动件二33驱动两个抵接杆31分别朝向对应两条提拉钢缆13一侧运动至滚轮311抵接在对应提拉钢缆13上,从而能够使位于压力传感器213的这部分提拉钢缆13完全抵接在压力传感器213上并处于拉伸状态。由于损坏的提拉钢缆13可能会出现打结或者提拉钢缆13部分断裂的情况,这时提拉钢缆13经过滚轮311时的钢缆粗细会发生变化,从而导致提拉钢缆13抵接在压力传感器213上的倾斜角度发生变化,导致压力传感器213受到的压力出现变化,最后分析仪能够通过这部分压力变化初步判断提拉钢缆13是否出现损坏。能够及时对提拉钢缆13进行检测,操作人员对分析仪中数据异常的提拉钢缆13进行检查,如果提拉钢缆13真的出现损坏,则更换相应提拉钢缆13,能够提高电动葫芦的安全性。
40.参照图2、图3,驱动件二33包括第一电机34、双面齿条331和第二齿轮332,双面齿条331为两侧侧面均带有齿面的齿条,双面齿条331滑动连接在安装座2内,两个第一齿轮323分别位于双面齿条331的上下两侧并分别与双面齿条331啮合连接。第二齿轮332转动连接在安装座2上,第二齿轮332的轴线方向平行于第一齿轮323的轴线方向,第二齿轮332位于双面齿条331的上方并啮合连接在双面齿条331上,第一电机34固定在安装座2内,第一电机34的输出轴同轴固定连接在第二齿轮332上。
41.通过驱动第一电机34的输出轴转动,使第二齿轮332带动双面齿条331在安装座2上滑动,从而带动两个第一齿轮323分别朝向相反的方向转动,从而使两个抵接杆31分别朝向相互远离的一侧移动至抵接在提拉钢缆13上。当第一电机34没有通电运行时,第一电机34的输出轴能够在外力的作用下转动。
42.本技术实施例一种高稳定性安全型电动葫芦的实施原理为:操作人员驱动两条提拉钢缆13向下伸出,然后将重物吊挂在吊钩12上,当电动葫芦本体1在天车上移动的过程中,在惯性的作用下,重物会带动提拉钢缆13出现晃动,从而使提拉钢缆13依次抵接在对应第一齿条321以及对应抵接杆31的滚轮311上,从而降低提拉钢缆13的晃动幅度。然后当不使用电动葫芦时,操作人员将重物卸下,然后驱动升降电机11对提拉钢缆13进行收卷,同时第一电机34驱动两条抵接杆31分别抵接在两条提拉钢缆13上,在提拉钢缆13收卷的同时由分析仪接收压力传感器213检测的压力变化并且初步判断提拉钢缆13是否出现损坏,如果分析仪分析出提拉钢缆13出现异常,则操作人员检查相应提拉钢缆13,如果提拉钢缆13真的出现损坏,则更换相应提拉钢缆13。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1