自动上料垃圾车的上料控制结构的制作方法
1.本实用新型涉及环卫设备领域,尤其涉及自动上料垃圾车的上料控制结构。
背景技术:
2.目前国内垃圾车主要以人工与液压控制的上料机构相结合来实现上料作业,通过若干个普通多路阀控制对应的提升机构油缸,来实现动作。这样做需要通过人工辅助将垃圾桶放至指定的位置,并且在上料过程起始段和末段会因为机构速度突变而产生冲击震动,更严重地会出现将垃圾桶甩出的风险。
技术实现要素:
3.本实用新型的目的在于提供自动上料垃圾车的上料控制结构。
4.为实现上述目的,本实用新型采用以下技术方案:
5.自动上料垃圾车的上料控制结构,其包括上料单元和液控单元,
6.所述上料单元包括伸缩机构、伸缩架、提升架、翻桶架、抱桶机械手、提升油缸和翻桶油缸;
7.所述伸缩机构包括导轨架、导轨和伸缩油缸,所述导轨架固定连接于副车架上,导轨滑动连接于导轨架上,伸缩架固定连接于导轨的前端,所述伸缩油缸的一端与导轨铰接,伸缩油缸的另一端与导轨架铰接,通过伸缩油缸驱动导轨在导轨架内左右滑动,从而带动伸缩架左右滑动;
8.所述提升架设于伸缩架内侧,提升架的顶部与伸缩架中部铰接,提升架的底部分别与翻桶架的底部及翻桶油缸的一端铰接,提升架的中部与提升油缸的一端铰接,提升油缸的另一端与伸缩架的底部铰接;
9.所述伸缩架的顶部两侧分别通过连杆与翻桶架的中部铰接;
10.所述抱桶机械手包括抓手固定座、右抓手板、左抓手板和抱桶油缸,所述右抓手板和左抓手板分别铰接于抓手固定座的两侧,通过抱桶油缸驱动右抓手板和左抓手板同步开合;
11.所述液控单元包括液压油箱、优先阀、单联多路阀、三联多路阀和齿轮泵,所述齿轮泵的出油口通过管路与优先阀的p油口相连;优先阀的p1油口与三联多路阀的p1油口相连;优先阀的p3油口与单联多路阀的p1油口相连;优先阀的p2油口和t口通过管路接回液压油箱;
12.三联多路阀的a1油口连接抱桶油缸的无杆腔,三联多路阀的b1油口连接抱桶油缸的有杆腔;
13.三联多路阀的a2油口连接提升油缸的无杆腔,三联多路阀的b2油口连接提升油缸的有杆腔;
14.三联多路阀的a3油口连接翻桶油缸的无杆腔,三联多路阀的b3油口连接翻桶油缸的有杆腔;
15.单联多路阀的a油口连接伸缩油缸的无杆腔,单联多路阀的b油口连接伸缩油缸的有杆腔。
16.进一步的,所述液压油箱连接有空气滤清器和液位计。
17.进一步的,所述液压油箱的回油口上连接有回油滤油器。
18.进一步的,所述齿轮泵的进油口依序通过吸油滤油器和铜球阀连接至液压油箱。
19.本实用新型采用以上技术方案,具有滑动功能的伸缩机构、抓取垃圾桶用的抱桶机械抓手和提升架等,从而可以替代人工,进行机械式地自动抓桶作业。进一步地,液控单元采用优先阀组和普通3位6通多路阀连接使用,用以解决普通3位6通多路阀本身不具备压力补偿能力的问题,使得上料机构动作部件能够同时工作,而互不干扰;并且可以对每个上料机构动作部件进行无级调速,使得上料机构作业起始段和末端可以做到速度的缓增和缓降。通过结构和液压的协同控制,可以实现垃圾车的自动上料,并且动作平顺可靠。
附图说明
20.以下结合附图和具体实施方式对本实用新型做进一步详细说明;
21.图1是本实用新型上料单元的立体图;
22.图2是本实用新型上料单元的正视图;
23.图3是本实用新型上料单元的侧视图;
24.图4是本实用新型中抱桶机械手立体图;
25.图5是上料单元伸出到位示意图;
26.图6是上料单元提升到位示意图;
27.图7是上料单元翻桶到位示意图;
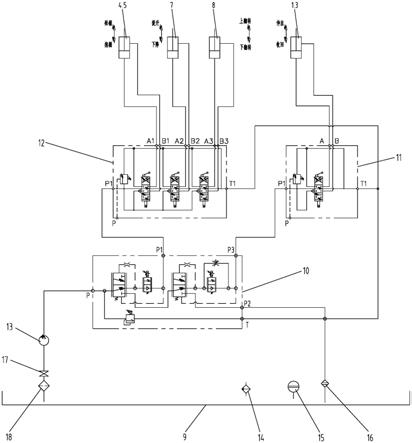
28.图8是液控单元的示意图;
29.图9是液压流量控制曲线图。
具体实施方式
30.如图1-8所示,本实用新型自动上料垃圾车的上料控制结构,其包括上料单元和液控单元;
31.所述上料单元包括伸缩机构1、伸缩架6、提升架2、翻桶架3、抱桶机械手4、提升油缸7和翻桶油缸8;
32.所述伸缩机构1设在副车架上,伸缩架6固定在伸缩机构1上并由伸缩机构1带动左右滑动;所述伸缩机构1包括导轨架1.1、导轨1.2和伸缩油缸1.3,所述导轨架1.1固定连接于副车架上,导轨1.2滑动连接于导轨架1.1上,伸缩架6固定连接于导轨1.2的前端,所述伸缩油缸1.3的一端与导轨1.2铰接,伸缩油缸1.3的另一端与导轨架1.1铰接,通过伸缩油缸1.3驱动导轨1.2在导轨架1.1内左右滑动,从而带动伸缩架6左右滑动;
33.所述提升架2设于伸缩架6内侧,提升架2的顶部与伸缩架6中部铰接,提升架2的底部分别与翻桶架3的底部及翻桶油缸8的一端铰接,提升架2的中部与提升油缸7的一端铰接,提升油缸7的另一端与伸缩架6的底部铰接;
34.所述伸缩架6的顶部两侧分别通过连杆5与翻桶架3的中部铰接;
35.所述抱桶机械手4包括抓手固定座4.1、右抓手板4.2、左抓手板4.3和抱桶油缸
4.5,所述抓手固定座4.1两侧分别与翻桶架3顶部两侧铰接,抓手固定座4.1的中部与翻桶油缸8的另一端铰接,所述右抓手板4.2和左抓手板4.3分别铰接于抓手固定座4.1的两侧,通过抱桶油缸4.5驱动右抓手板4.2和左抓手板4.3同步开合。在抱桶油缸4.5的驱动下,抓手可以实现0~90
°
开合,从而实现抓桶放桶动作。
36.上料装置作业时,伸缩架6滑出,抱桶机械手4通过抱桶油缸4.5驱动抱紧垃圾桶,提升架2通过提升油缸7驱动,水平上料,同时伸缩架6收回到位,待垃圾桶到达一定高度后,翻桶架3通过翻桶油缸8驱动翻转一定角度后垃圾掉落至箱体内。上料完成后,按照原路径将垃圾桶放回至初始位置。
37.所述液控单元包括液压油箱9、优先阀10、单联多路阀11、三联多路阀12和齿轮泵13,所述齿轮泵13的出油口通过管路与优先阀10的p油口相连;优先阀10的p1油口与三联多路阀12的p1油口相连;优先阀10的p3油口与单联多路阀11的p1油口相连;优先阀10的p2油口和t口通过管路接回液压油箱9;
38.三联多路阀12的a1油口连接抱桶油缸4.5的无杆腔,三联多路阀12的b1油口连接抱桶油缸4.5的有杆腔;
39.三联多路阀12的a2油口连接提升油缸7的无杆腔,三联多路阀12的b2油口连接提升油缸7的有杆腔;
40.三联多路阀12的a3油口连接翻桶油缸8的无杆腔,三联多路阀12的b3油口连接翻桶油缸8的有杆腔;
41.单联多路阀11的a油口连接伸缩油缸1.3的无杆腔,单联多路阀11的b油口连接伸缩油缸1.3的有杆腔。
42.所述液压油箱9连接有空气滤清器14和液位计15,所述液压油箱9的回油口上连接有回油滤油器16。所述齿轮泵13的进油口依序通过吸油滤油器17和铜球阀18连接至液压油箱9。
43.通过优先阀10的阀后补偿,使得伸缩油缸1.3能够与翻桶油缸8、提升油缸7和抱桶油缸4.5中的任意个进行同时的、互不干扰的动作,提高实际工作效率。在所有油缸起步动作时和临近结束时,采用如图9的流量供应控制,使油缸启停时速度缓变。
44.本实用新型的上料控制结构在行驶过程能同时进行上料机构的收回和提升动作或者上料机构的伸出和下降动作,提高了作业效率。在上料机构运行中,动作平稳顺畅,无冲击,防止作业过程垃圾桶抖动造成污水的滴、洒、漏二次污染。通过结构和液压的协同控制,可以实现垃圾车的自动上料,并且动作平顺可靠。
45.上面结合附图对本实用新型的实施加以描述,但是本实用新型不局限于上述的具体实施方式,上述的具体实施方式是示意性而不是加以局限本实用新型,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1