一种智能药盒抓药系统
1.本实用新型涉及一种抓药设备,特别是一种智能药盒抓药系统。
背景技术:
2.抓药系统是智能药盒的关键系统,直接决定智能药盒自动配药的质量和效率,由于药品种类繁多,各种药品的外形也不一样,如各种形状的药片、药丸、胶囊等,对抓药系统提出很高的要求。如抓药系统设计不合理,会导致药品无法准确抓取、抓取药品数量或多或少、抓取药品效率低等问题,最终影响自动配药的质量。目前市场上药盒抓药系统主要通过以下方式实现:
3.1、将不同药品分类存放,然后通过手动方式进行抓药配药,该种方式为传动抓药配药方式;
4.2、将不同药品分类存放,然后通过机械手抓取药品,但是由于药品外形种类繁多,对机械手通用化提出非常高的要求,通过机械手抓取药品,普遍存在药品无法抓取、药品抓取数量不对等问题;
5.3、将不同药品分类存放,然后通过真空泵吸取药品,此种抓取药品方式通用性较高,但是通过真空泵吸取方式抓取药品,普遍存在抓取数量不对等问题。
技术实现要素:
6.本实用新型要解决的技术问题是:提供一种智能药盒抓药系统。
7.解决上述技术问题的技术方案是:一种智能药盒抓药系统,包括药品配送系统、举升振动系统和真空吸嘴系统,举升振动系统包括举升支架电机、线性导轨丝杠滑台、振动电机安装架、减振弹簧和振动电机,线性导轨丝杠滑台与举升支架电机连接,振动电机安装架设置于线性导轨丝杠滑台上,振动电机通过减振弹簧设置于振动电机安装架上;真空吸嘴系统包括真空吸嘴移动系统、真空吸嘴和真空泵,真空吸嘴通过真空吸管与真空泵连接,真空吸嘴设置于真空吸嘴移动系统上。
8.本实用新型的进一步技术方案是:真空吸嘴移动系统包括步进电机和线性导轨丝杠滑台,线性导轨丝杠滑台与步进电机连接,真空吸嘴通过支撑架设置于线性导轨丝杠滑台上,真空吸嘴移动系统的数量为2个,其中一个真空吸嘴移动系统以交叉的方式设置与另一个真空吸嘴移动系统上。
9.药品配送系统包括药盒架电机、齿轮、药盒架和药盒,药盒架通过齿轮与药盒架电机连接,药盒架上设有多个药盒放置槽,药盒通过药盒放置槽放置于药盒架上。
10.由于采用上述技术方案,本实用新型之一种智能药盒抓药系统,具有以下有益效果:
11.通过真空吸嘴能准确吸附有固定形状且直径各异的常见药片、药丸和胶囊,且通过真空吸嘴一次吸取一颗药,有效控制取药量。进一步提高取药精度的措施。在取药过程中,同时加了振动系统,利用振动电机与传动机构,带动药盒振动,使得药片在盒内均匀分
布,更容易接触到吸药嘴,辅以传感器,使得吸药更加的精准可靠。
12.下面,结合说明书附图和具体实施例对本实用新型之一种智能药盒抓药系统的技术特征作进一步的说明。
附图说明
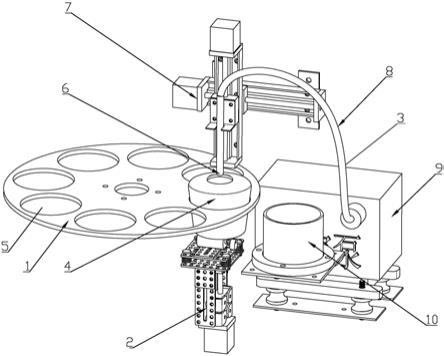
13.图1:一种智能药盒抓药系统的结构示意图。
14.图2:一种智能药盒抓药系统的结构示意图。
15.图3:举升振动系统的结构示意图。
16.图4:举升振动系统的结构示意图。
17.图5:药品配送系统的结构示意图。
18.在上述附图中,各标号说明如下:
19.1-药盒架,举升振动系统2,真空吸嘴系统3,4-药盒,5-药盒放置槽,真空吸嘴6,真空吸嘴移动系统7,真空吸管8,真空泵9,取药盒10,11-举升支架电机,12-线性导轨丝杠滑台ⅰ,13-振动电机安装架,14-减振弹簧,15-振动电机,16-药盒架电机,17-小齿轮,18-大齿轮。
具体实施方式
20.一种智能药盒抓药系统,药品配送系统、举升振动系统2、真空吸嘴系统3和取药盒10和单片机控制系统,所述药品配送系统、举升振动系统和真空吸嘴系统分别与电控系统连接。通过举升振动系统将待抓药的药盒举起并进行振动,最后通过真空吸嘴系统抓取药品并输送到取药盒,以上整个动作过程通过单片机控制系统实现。
21.举升振动系统2包括举升支架电机11(举升支架电机为步进电机ⅱ)、线性导轨丝杠滑台ⅰ12、振动电机安装架13、减振弹簧14、振动电机15,线性导轨丝杠滑台ⅰ与举升支架电机连接,振动电机安装架设置于线性导轨丝杠滑台ⅰ上,振动电机通过减振弹簧设置于振动电机安装架上,减振弹簧下端设置于振动电机安装架上,减振弹簧上端设有平板,振动电机固定在平板上,减振弹簧和平板构成隔振系统。举升振动系统位于指定的位置处的药盒下方,通过举升振动系统将转动到该位置处的药盒托举起来。通过举升支架电机转动,带动线性导轨丝杠滑台ⅰ上下直线运动,从而带动振动电机安装架上下直线运动,实现振动电机的举升,振动电机在举升后与药盒底部接触,带动药盒进行举升,而振动电机的振动带动药盒的振动,最终实现药盒的举升振动。同时为了避免振动电机的振动直接传递到线性导轨丝杠滑台ⅰ,影响线性导轨丝杠滑台的使用寿命,在振动电机安装架中间设置减振弹簧,减弱振动电机的振动传递。
22.真空吸嘴系统包括真空吸嘴移动系统7、真空吸嘴6和真空泵9,真空吸嘴与真空泵连接,真空泵与真空泵电机连接,真空吸嘴通过真空吸管8与真空泵连接,通过真空泵抽真空,真空吸管连接真空泵和真空吸嘴,然后通过真空吸嘴的负压作用抓取药品,真空吸嘴伸入药盒内部则通过真空吸嘴移动系统的左右上下移动来实现。真空吸嘴设置于真空吸嘴移动系统上,通过真空吸嘴移动系统带动真空吸嘴进行移动,从而可以转移药物。真空吸嘴移动系统包括步进电机和线性导轨丝杠滑台,真空吸嘴通过支撑架设置于线性导轨丝杠滑台上,线性导轨丝杠滑台与步进电机连接,真空吸嘴移动系统的数量为2个,其中一个真空吸
嘴移动系统以交叉的方式设置与另一个真空吸嘴移动系统上,即步进电机和线性导轨丝杠滑台的数量均为2个,每个线性导轨丝杠滑台与一个步进电机连接,2个线性导轨丝杠滑台以十字交叉的方式连接,即一个线性导轨丝杠滑台能沿着另一个线性导轨丝杠滑台横向移动,真空吸嘴设置于能移动的线性导轨丝杠滑台上,通过线性导轨丝杠滑台带动真空吸嘴上下移动、左右移动。通过2个步进电机线分别控制性导轨丝杠滑台的两个方向的直线运动实现真空吸嘴的水平和垂直运动,保证真空吸嘴可以伸入药盒底部进行抓药,而真空吸嘴的抓药动作主要通过真空泵抽真空带动真空吸嘴吸取药品,从而完成抓药动作。真空吸嘴上装有大小合适的橡胶吸盘,在吸嘴与真空泵的连接管上安装有数字压力传感器,一旦吸嘴吸附药品,传感器检测到管路的压力升高,从而传送信号给单片机,单片机控制丝杆电机,从而吸嘴抬升,完成一次抓药过程。真空吸嘴可为现有的一些真空吸盘组。振动机构使药品振动,这样吸嘴能够更容易接触药品,更加容易吸药。通过前述抓药动作将不同的药品抓取到取药盒完成配药,取药盒由取药盒固定装置进行定位。取药时,直接人工将取药盒从取药盒固定装置中拿出,完成取药动作。
23.药品配送系统包括药盒架电机16(药盒架电机为步进电机ⅰ)、齿轮、药盒架和药盒,药盒架通过齿轮与步进电机连接,齿轮包括小齿轮17和大齿轮18,药盒架下设有大齿轮,步进电机转子上设有小齿轮,大齿轮与小齿轮啮合连接,药盒架上设有多个药盒放置槽,药盒通过药盒放置槽放置于药盒架上,通过步进电机的转动带动药盒架的转动,从而将药盒转动到指定的位置处。通过步进电机转动,带动小齿轮转动,从而带动大齿轮转动,实现电机转速减速,大齿轮转动带动药盒架转动,最终带动药盒转动。药盒的数量为8个,将不同品种的药品分别装入8个不同的药盒,最终可实现8个不同药品的配送。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1