一种地面托盘式自主移动机器人AMR自动伸出装置
一种地面托盘式自主移动机器人amr自动伸出装置
技术领域
1.本实用新型涉及自动传输设备领域,具体涉及一种地面托盘式自主移动机器人amr自动伸出装置。
背景技术:
2.(automated guided vehicle,简称agv),通常也称为agv小车。指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道(electromagnetic path
‑
following system)来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
3.目前,公开号为cn212605547u的中国专利公开了一种物流小车,它包括车体;行走机构,包括两个第一轮组和第二轮组,两个第一轮组沿着第一方向间隔布置,第一轮组包括第一万向轮、驱动轮和第一铰接架,第一万向轮和驱动轮沿与第一方向垂直的第二方向依次布置,并均与第一铰接架连接,第一铰接架在第一铰接孔处与车体铰接,第二轮组沿着第二方向布置于驱动轮的下游,并包括第二铰接架和两个第二万向轮,两个第二万向轮连接于第二铰接架的沿第一方向的两端,第二铰接架在第二铰接孔处与车体铰接;和牵引杆,设置于车体上,并用于连接物流小车与被牵引车,在第二方向上,牵引杆位于第一铰接孔和第二铰接孔之间,并靠近第一铰接孔。
4.这种物流小车虽然提升物流小车负载能力,但是往往运动部件往往是相对底座无法进行位移,从而减少了操作的多样性。
技术实现要素:
5.本实用新型的目的是提供地面托盘式自主移动机器人amr自动伸出装置,其具有可以有效的将自主移动机器人伸入到物品下方,从而抬起搬运物体,进行有效运输的优点。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:
7.一种地面托盘式自主移动机器人amr自动伸出装置,包括底座,所述底座上设有驱动装置,所述驱动装置出口设有调节装置,所述调节装置包括位于底座上设有的齿轮架、与齿轮架转动连接的轴杆、套设于轴杆两侧与驱动装置出口啮合的锥齿轮、位于轴杆两端还设有主动链轮、位于底座顶端还设有支架、位于支架一侧转动连接有与主动链轮匹配的从动链轮、套设于主动链轮和从动链轮上的链条、位于支架另一侧设有齿轮及位于底座上与齿轮匹配的位移装置。
8.通过采用上述技术方案,设有的驱动装置将带动调节装置进行调节,将整个位移装置通过调节装置的带动伸出到外部,从而辅助自主移动机器人伸入货物底部,便于后续的搬运工作。
9.进一步设置:所述驱动装置包括位于底座上的伸出电机及位于伸出电机出口与锥
齿轮连接的减速器。
10.通过采用上述技术方案,设有的驱动装置可以有效的带动轴杆进行转动,从而带动位移装置发生移动。
11.进一步设置:所述位移装置包括位于底座两侧设有的伸出架、位于伸出架靠近齿轮一端设有的工业级导轨、位于工业级导轨上设有与齿轮啮合的齿条及位于伸出架底部设有的万向轮。
12.通过采用上述技术方案,设有的位移装置可以有效的通过导轨及齿条和齿轮的配合进行位移。
13.进一步设置:所述底座两侧还设有测试装置,所述测试装置包括位于底座两侧设有的竖杆、位于竖杆靠近导轨一侧设有距离传感器,所述伸出电机上设有与距离传感器电连接的控制器。
14.通过采用上述技术方案,设有的测试装置可以有效的控制伸出电机的转动,通过距离传感器来反馈给控制器,控制器则通过相应的距离数据来控制伸出电机的转动情况。
15.进一步设置:所述底座上还设有支撑装置,所述支撑装置包括位于底座上设有的若干支撑块、位于支撑块上设有的支撑杆及位于支撑杆上设有的减震弹簧。
16.通过采用上述技术方案,设有的减震弹簧可以有效的减少搬运货物时出现的抖动等情况,从而增加整体的稳定效果。
17.进一步设置:所述减震弹簧顶端还设有支撑框。
18.通过采用上述技术方案,设有的支撑框可以有效的增加受力面积,从而使得整体更为稳固。
19.综上所述,本实用新型具有以下有益效果:可以有效的辅助自主移动机器人伸出的情况,将整个伸出架插入到需要搬运的货物底部,整体较为稳定,搬运过程中有效的进行减震。
附图说明
20.下面结合附图对本实用新型进一步说明。
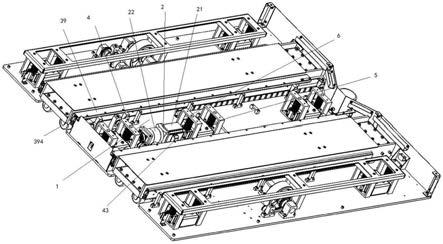
21.图1是地面托盘式自主移动机器人amr自动伸出装置整体结构示意图;
22.图2是地面托盘式自主移动机器人amr自动伸出装置局部放大结构示意图。
23.图中,1、底座;2、驱动装置;21、伸出电机;22、减速器;3、调节装置;31、齿轮架;32、轴杆;33、锥齿轮;34、主动链轮;35、支架;36、从动链轮;37、链条;38、齿轮;39、位移装置;391、伸出架;392、工业级导轨;393、齿条;394、万向轮;4、测试装置;41、竖杆;42、距离传感器;43、控制器;5、支撑装置;51、支撑块;52、支撑杆;53、减震弹簧;6、支撑框。
具体实施方式
24.下面结合附图对本实用新型的具体实施方式做进一步说明。
25.本实用新型所采用的技术方案是:一种地面托盘式自主移动机器人amr自动伸出装置,如图1及图2所示,包括底座1,底座1上设有驱动装置2,驱动装置2包括位于底座1上的伸出电机21及位于伸出电机21出口与锥齿轮33连接的减速器22,减速器22的出口还设有调节装置3,而调节装置3包括位于底座1上与减速器22连接的齿轮架31,在齿轮架31之间转动
连接有轴杆32,齿轮架31之间的轴杆32两侧上设有与驱动装置2出口啮合的锥齿轮33,而轴杆32位于齿轮架31外侧的两端上还设有主动链轮34,在底座1顶端还设有支架35,支架35一侧转动连接有与主动链轮34匹配的从动链轮36,在主动链轮34和从动链轮36上套设有链条37,在支架35另一侧上设有齿轮38。
26.在底座1上还设有与齿轮38匹配的位移装置39,位移装置39包括位于底座1两侧设有的伸出架391,在伸出架391靠近齿轮38一端设有工业级导轨392,工业级导轨392上设有与齿轮38啮合的齿条393,同时伸出架391底部设有的万向轮394,底座1上还设有支撑装置5,支撑装置5包括位于底座1上设有的若干支撑块51在,在支撑块51上设有支撑杆52,支撑杆52上设有的减震弹簧53,减震弹簧53顶端还设有支撑框6,从而便于整个设备的支撑,底座1两侧还设有测试装置4,测试装置4包括位于底座1两侧设有的竖杆41,在竖杆41靠近导轨一侧设有距离传感器42,伸出电机21上设有与距离传感器42电连接的控制器43。
27.其主要工作原理如下:整个设备工作方式如下所述:伸出电机21通过减速器22减速并增大转矩,带动锥齿轮33旋转,再传给轴杆32转动,轴杆32带动主动链轮34旋转,然后通过链条37带动从动链轮36旋转,从动链轮36与齿轮38安装在同一轴上,做相同的旋转运动,齿轮38旋转,带动齿条393做直线运动;万向轮394与地面接触,齿条393作直线运动时,带动位移装置39往外做伸出运动,当运动到某个位置,距离传感器42检测的距离长度信号,通过电连接将信号发送给伸出电机21上的控制器43,从而使得整个位移装置39达到设定的距离后伸出电机21停止,伸出结束。
28.以上是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化与修饰,均属于实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1