数控多功能绕线机的制作方法
1.本实用新型属于绕线机技术领域,具体涉及数控多功能绕线机。
背景技术:
2.随着人们生活水平的不断提高,人们会经常去参加一些娱乐性的活动,例如:钓鱼。而钓鱼最常用到的就是钓鱼工具,良好的钓鱼工具会给人们带来极大的便利性,尤其是作为钓鱼工具之一的鱼线,在使用前钓鱼人需要将绑好的鱼线缠绕于鱼线圈上,当需要鱼线时将鱼线拉出后即可使用。
3.现有的鱼线需要手动缠绕在鱼线圈上,生产效率低,劳动力浪费严重。
技术实现要素:
4.本实用新型提供了数控多功能绕线机,滑座可前后移动,在角度监测机构的信号反馈下将线材自动缠绕在单个或多个鱼线圈上,实现连续化及多功能的作业,大大提高生产效率,降低劳动力需求。
5.本实用新型提供如下技术方案:数控多功能绕线机,包括外壳体和连接板,所述外壳体和连接板之间固定安装有导杆和连接杆,所述外壳体朝向连接板的端面安装有导线机构和角度监测机构,所述外壳体的内部固定安装有电机一和电机二,所述外壳体的侧面固定安装有控制器,所述外壳体的顶部固定安装有线盘支架,所述线盘支架上适配安装有线盘,所述电机二通过联轴器传动连接丝杠,所述丝杠螺纹连接有滑座且滑座滑动连接导杆,所述丝杠的另一端转动连接固定安装在连接板上的轴承座,所述电机一的输出轴适配插接鱼线圈安装架的一端,所述鱼线圈安装架的另一端适配插接固定安装在连接板上的球铰,所述鱼线圈安装架的外侧套装有鱼线圈,所述鱼线圈的侧面插装有大头针,所述外壳体和连接板之间安装有手动监测机构。
6.其中,所述外壳体和连接板的底面相平齐,所述滑座的侧面上下相邻贯通开设有出线孔一和出线孔二,所述鱼线圈安装架的轴线平行于丝杠和导杆的轴线,所述鱼线圈与鱼线圈安装架之间为过盈配合;电机二通过联轴器驱动丝杠转动时,滑座可牵拉线体沿鱼线圈安装架的轴线方向移动,进而在鱼线圈安装架转动的过程中,连续性的依次将线体卷绕在鱼线圈安装架外侧相邻安装的多个鱼线圈上,大大降低了劳动量,提高了生产效率。
7.其中,所述导线机构包括结构相同的夹线器一和夹线器二,以及结构相同的引线圈一和引线圈二,所述夹线器一和夹线器二左右相邻固定安装在角度监测机构上方的外壳体的侧面,所述引线圈一和引线圈二左右相邻固定安装在夹线器一、夹线器二上方的外壳体的侧面;外壳体单独工作时,可通过导线机构对安装在电机一输出轴上的单个鱼线圈进行卷绕加工,也可进行涂胶、拧线、绑钩、路亚线轮的导线的多功能工作。
8.其中,所述角度监测机构包括编码器和滑轮,所述编码器的壳体固定安装在外壳体上且编码器的输出轴上固定安装有滑轮;计数线材穿过滑轮后,滑轮在线材带动下转动,编码器即可监测滑轮转动的角度,为电机二提供反馈量。
9.其中,所述大头针的数量与鱼线圈的数量相同;滑座带动线材移动一个鱼线圈厚度的距离时,随着鱼线圈的转动,线材可拴挂在大头针上,从而避免已经缠绕完整的鱼线圈中的线材发生脱线。
10.其中,所述鱼线圈安装架包括主杆体,所述主杆体的一端开设有滑动连接电机一输出轴的滑动槽,所述主杆体的侧面上开设有螺纹连接外螺杆把手的内螺纹孔,且内螺纹孔的底端垂直贯通滑动槽的一侧,所述主杆体朝向滑动槽的外侧面上固定设有限位板,所述主杆体的另一端固定连接有插接杆,所述插接杆适配插接球铰;鱼线圈安装架可便捷的连接电机一与球铰,并进行快速的拆卸更换。
11.其中,所述手动监测机构包括滑轨、色标尺和光电传感器,所述滑轨、色标尺的两端均固定设有连接座,所述滑轨、色标尺两端的连接座通过螺栓固定连接外壳体和连接板,所述光电传感器固定安装在滑动块朝向色标尺的端面上,所述滑动块滑动安装在滑轨中,所述滑动块朝向色标尺的端面固定连接有固定板,所述固定板上转动安装有转动尺,所述转动尺为扁平的方形杆结构;转动尺转动上抬后可紧贴距离插接杆最近位置的一个鱼线圈的端面,达到定位光电传感器的作用。
12.其中,所述色标尺穿过光电传感器的u型槽,所述滑轨和色标尺相互平行安装,所述色标尺朝向光电传感器发射端的端面设有色标,所述色标中相邻的刻度之间的直线距离等于一个鱼线圈的厚度;鱼线圈紧贴限位板安装,转动尺定位贴合鱼线圈后,控制器通过计算光电传感器经过的色标的刻度即可得出主杆体上安装的鱼线圈的数量,从而智能控制电机二的工作状态。
13.本实用新型的有益效果是:
14.1、电机二通过联轴器驱动丝杠转动时,滑座可牵拉线体沿鱼线圈安装架的轴线方向移动,进而在鱼线圈安装架转动的过程中,连续性的依次将线体卷绕在鱼线圈安装架外侧相邻安装的多个鱼线圈上,大大降低了劳动量,提高了生产效率;外壳体单独工作时,可通过导线机构对安装在电机一输出轴上的单个鱼线圈进行卷绕加工,也可进行涂胶、拧线、绑钩、路亚线轮的导线的多功能工作;计数线材穿过滑轮后,滑轮在线材带动下转动,编码器即可监测滑轮转动的角度,为电机二提供反馈量;滑座带动线材移动一个鱼线圈厚度的距离时,随着鱼线圈的转动,线材可拴挂在大头针上,从而避免已经缠绕完整的鱼线圈中的线材发生脱线;鱼线圈安装架可便捷的连接电机一与球铰,并进行快速的拆卸更换。
15.2、转动尺转动上抬后可紧贴距离插接杆最近位置的一个鱼线圈的端面,达到定位光电传感器的作用;鱼线圈紧贴限位板安装,转动尺定位贴合鱼线圈后,控制器通过计算光电传感器经过的色标的刻度即可得出主杆体上安装的鱼线圈的数量,从而智能控制电机二的工作状态。
16.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
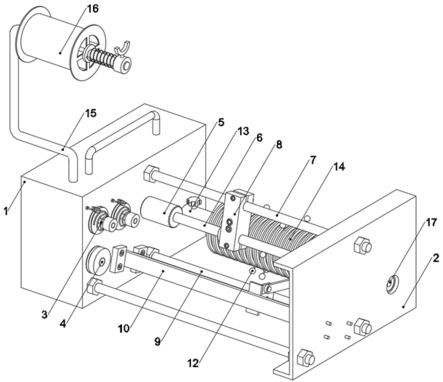
17.图1为本实用新型的结构示意图一;
18.图2为本实用新型的结构示意图二;
19.图3为本实用新型的俯视图;
20.图4为本实用新型中外壳体的结构示意图;
21.图5为本实用新型中连接板的结构示意图;
22.图6为本实用新型中滑座的结构示意图;
23.图7为本实用新型中手动监测机构的结构示意图;
24.图8为本实用新型中鱼线圈安装架的结构示意图;
25.图中:1、外壳体;2、连接板;3、导线机构;31、夹线器一;32、夹线器二;33、引线圈一;34、引线圈二;4、角度监测机构;41、编码器;42、滑轮;5、联轴器;6、丝杠;7、导杆;8、滑座;81、出线孔一;82、出线孔二;9、连接杆;10、手动监测机构;101、滑轨;102、色标尺;103、连接座;104、滑动块;105、固定板;106、转动尺;107、光电传感器;108、色标;11、控制器;12、大头针;13、鱼线圈安装架;131、主杆体;132、滑动槽;133、外螺杆把手;134、限位板;135、插接杆;14、鱼线圈;15、线盘支架;16、线盘;17、球铰;18、轴承座;19、电机一;20、电机二。
具体实施方式
26.请参阅图1-图8,本实用新型提供以下技术方案:数控多功能绕线机,包括外壳体1和连接板2,所述外壳体1和连接板2之间固定安装有导杆7和连接杆9,所述外壳体1朝向连接板2的端面安装有导线机构3和角度监测机构4,所述外壳体1的内部固定安装有电机一19和电机二20,所述外壳体1的侧面固定安装有控制器11,所述外壳体1的顶部固定安装有线盘支架15,所述线盘支架15上适配安装有线盘16,所述电机二20通过联轴器5传动连接丝杠6,所述丝杠6螺纹连接有滑座8且滑座8滑动连接导杆7,所述丝杠6的另一端转动连接固定安装在连接板2上的轴承座18,所述电机一19的输出轴适配插接鱼线圈安装架13的一端,所述鱼线圈安装架13的另一端适配插接固定安装在连接板2上的球铰17,所述鱼线圈安装架13的外侧套装有鱼线圈14,所述鱼线圈14的侧面插装有大头针12,所述外壳体1和连接板2之间安装有手动监测机构10。
27.所述外壳体1和连接板2的底面相平齐,所述滑座8的侧面上下相邻贯通开设有出线孔一81和出线孔二82,所述鱼线圈安装架13的轴线平行于丝杠6和导杆7的轴线,所述鱼线圈14与鱼线圈安装架13之间为过盈配合;电机二20通过联轴器5驱动丝杠6转动时,滑座8可牵拉线体沿鱼线圈安装架13的轴线方向移动,进而在鱼线圈安装架13转动的过程中,连续性的依次将线体卷绕在鱼线圈安装架13外侧相邻安装的多个鱼线圈14上,大大降低了劳动量,提高了生产效率。
28.所述导线机构3包括结构相同的夹线器一31和夹线器二32,以及结构相同的引线圈一33和引线圈二34,所述夹线器一31和夹线器二32左右相邻固定安装在角度监测机构4上方的外壳体1的侧面,所述引线圈一33和引线圈二34左右相邻固定安装在夹线器一31、夹线器二32上方的外壳体1的侧面;外壳体1单独工作时,可通过导线机构3对安装在电机一19输出轴上的单个鱼线圈14进行卷绕加工,也可进行涂胶、拧线、绑钩、路亚线轮的导线的多功能工作。
29.所述角度监测机构4包括编码器41和滑轮42,所述编码器41的壳体固定安装在外壳体1上且编码器41的输出轴上固定安装有滑轮42;计数线材穿过滑轮42后,滑轮42在线材带动下转动,编码器41即可监测滑轮42转动的角度,为电机二20提供反馈量。
30.所述大头针12的数量与鱼线圈14的数量相同;滑座8带动线材移动一个鱼线圈14厚度的距离时,随着鱼线圈14的转动,线材可拴挂在大头针12上,从而避免已经缠绕完整的
鱼线圈14中的线材发生脱线。
31.所述鱼线圈安装架13包括主杆体131,所述主杆体131的一端开设有滑动连接电机一19输出轴的滑动槽132,所述主杆体131的侧面上开设有螺纹连接外螺杆把手133的内螺纹孔,且内螺纹孔的底端垂直贯通滑动槽132的一侧,所述主杆体131朝向滑动槽132的外侧面上固定设有限位板134,所述主杆体131的另一端固定连接有插接杆135,所述插接杆135适配插接球铰17;鱼线圈安装架13可便捷的连接电机一19与球铰17,并进行快速的拆卸更换。
32.所述手动监测机构10包括滑轨101、色标尺102和光电传感器107,所述滑轨101、色标尺102的两端均固定设有连接座103,所述滑轨101、色标尺102两端的连接座103通过螺栓固定连接外壳体1和连接板2,所述光电传感器107固定安装在滑动块104朝向色标尺102的端面上,所述滑动块104滑动安装在滑轨101中,所述滑动块104朝向色标尺102的端面固定连接有固定板105,所述固定板105上转动安装有转动尺106,所述转动尺106为扁平的方形杆结构;转动尺106转动上抬后可紧贴距离插接杆135最近位置的一个鱼线圈14的端面,达到定位光电传感器107的作用。
33.所述色标尺102穿过光电传感器107的u型槽,所述滑轨101和色标尺102相互平行安装,所述色标尺102朝向光电传感器107发射端的端面设有色标108,所述色标108中相邻的刻度之间的直线距离等于一个鱼线圈14的厚度;鱼线圈14紧贴限位板134安装,转动尺106定位贴合鱼线圈14后,控制器11通过计算光电传感器107经过的色标108的刻度即可得出主杆体131上安装的鱼线圈14的数量,从而智能控制电机二20的工作状态。
34.本实用新型的工作原理及使用流程:将线盘16安装在线盘支架15上,在每一个鱼线圈14的侧面上均插装一个大头针12,然后将多个鱼线圈14依次套装在主杆体131的外侧,并使鱼线圈14紧贴限位板134安装,随后操作人员将鱼线圈安装架13安装在外壳体1和连接板2上,安装时,转动球铰17将插接杆135插入球铰17内,此时鱼线圈安装架13设有滑动槽132的一端向远离外壳体1的方向倾斜,随后操作人员将滑动槽132对齐电机一19的输出轴,再滑动推动鱼线圈安装架13向外壳体1的方向移动,进而使滑动槽132套装在电机一19输出轴的外侧并使电机一19输出轴的端部紧贴滑动槽132的内端面,随后操作人员转动外螺杆把手133使外螺杆把手133的底端紧压电机一19输出轴的侧面,保证鱼线圈安装架13随电机一19输出轴的转动而转动;鱼线圈安装架13安装结束后,操作人员将线盘16上的线材一端依次穿过引线圈一33、绕过滑轮42、夹线器二32,穿入引线圈二34、出线孔一81/出线孔二82引入紧贴限位板134的鱼线圈14上;随后,操作人员可通过控制器11选择本装置的工作模式,自动模式时,电机二20的转动总角度为预设的固定值,即滑座8的移动距离为固定数值:当电机一19启动后,电机一19带动鱼线圈安装架13转动,鱼线圈安装架13带动鱼线圈14转动进而卷绕线材,滑轮42随着线材的移动而转动,编码器41对转动的角度进行监测,滑轮42的转动角度达到预设的阈值后,电机二20转动固定的角度,通过联轴器5带动丝杠6转动,进而使滑座8带动线材移动至下一个鱼线圈14上进行卷绕,滑座8带动线材移动一个鱼线圈14厚度的距离时,随着鱼线圈14的转动,线材可拴挂在大头针12上,从而避免已经缠绕完整的鱼线圈14中的线材发生脱线,电机二20多次转动的角度的和达到设定的阈值后,电机一19停转,所有的鱼线圈14卷绕完成;手动模式时,电机二20的转动圈数与光电传感器107的位置相关,操作人员抬起转动尺106的一端,并滑动推动滑动块104在滑轨101上的位置,使转
动尺106紧贴距离插接杆135最近位置的一个鱼线圈14的端面,控制器11计算光电传感器107经过的色标108的刻度即可得出主杆体131上安装的鱼线圈14的数量即电机二20需要转动的总角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1