一种绝缘漆自动化上料研磨设备的制作方法
1.本实用新型涉及一种物料研磨设备,尤其是应用在绝缘漆物料研磨上料过程中的设备。
背景技术:
2.我国是制造业大国,每年都要生产及大数量的绝缘材料;在绝缘材料的生产制作过程中,绝缘漆的生产质量和生产效率尤为重要;在绝缘漆的生产过程中,研磨是一道极为重要的工序,研磨的质量如何直接影响着浆料质量乃至于最后的成品漆的质量,研磨加料这一工序是确保绝缘漆生产质量的关键所在。
3.目前,很多国内的绝缘漆制造厂商还在使用落后的人工操作的方式来进行研磨加料,在人工操作中操作人员需要不断将研磨过的浆料手动放入研磨机内重复研磨数十次,不仅效率低下,由于人工操作的弊端,还极易导致浆料在操作过程中受到污染,从而影响浆料的质量;除此之外,研磨工作场地噪声大、有毒有害物质多,对于操作人员的人身健康也有着极大的影响,长时间手动操作研磨机进行加料工作会对操作人员的身心健康造成不可逆的严重后果;随着目前市场上对于绝缘漆的需求和质量要求不断提升,原有的人工操作方式已经不适应现在的绝缘漆生产需要,采取自动化机械臂等代替人工操作的方式逐渐成为绝缘漆研磨加料工序的主要发展趋势;使用自动化的机械臂可以有效减少操作人员反复进入操作室并且手动上料的所需要消耗的时间,极大地提升绝缘漆生产过程中的劳动生产率,提升生产效率;减少了人工介入的影响,提升了产品的质量;推动了我国制造业的自动化水平进一步发展,具有十分重要的社会意义。
4.现有的物料研磨用机械臂往往存在自动化不足,仍需要人工大量操作等问题,对于实现完全的自动化生产仍具有一定的距离,如何设计开发出一种自动化程度高,使用可靠的自动化机械臂,以及配套的研磨设备,对于提高绝缘漆生产效率与生产质量来说具有重要的意义。
技术实现要素:
5.本实用新型的目的在于提供一种自动化程度高,使用可靠的绝缘漆自动化上料研磨设备。
6.基于上述目的,本实用新型采用如下技术方案:
7.一种绝缘漆自动化上料研磨设备,包括三辊研磨机和设置在三辊研磨机上的自动机械臂,其特征在于三辊研磨机包括前机体和后机体,前机体和后机体设置在底座上,在前机体和后机体之间设置有三辊:底座上设置有机械臂安装底座,自动机械臂设置在机械臂安装底座上;在三辊的下方设置有朝向自动机械臂的方向倾斜向下的物料回收槽;自动机械臂的自由端设置有前端软铲和工业镜头。
8.优选地,自动机械臂具有七自由度,自动机械臂由七个相同结构的关节依次连接组成,每两个相邻的关节之间通过关节连接件连接;自动机械臂的固定端设置有固定连接
件,固定连接件与机械臂安装底座配合。
9.优选地,关节包括圆柱状的关节外壳,在关节外壳的内部一端设置有谐波减速器,谐波减速器与关节连接件通过输出轴连接;谐波减速器通过齿轮组连接有制动器和行星减速器;行星减速器连接有驱动电机,驱动电机连接有编码器;在关节内部还设置有驱动器,驱动器通过导线与关节内其他元件和外部控制台相连。
10.优选地,物料回收槽包括回收槽挡板,回收槽挡板铰接在回收槽底板上;回收槽挡板的两端设置有回收槽挡板固定端,与回收槽挡板固定端配合的设置有回收槽固定端;回收槽挡板固定端外侧设置有磁铁,回收槽固定端的内侧设置有配合的磁铁;物料回收槽的可以对完成研磨的物料进行收集,以供操作人员和工业镜头对物料研磨程度进行评估来判断是否需要继续研磨;当判断研磨充分不需要继续研磨时,便可以打开回收槽挡板将物料导入收集用的容器内,完成研磨工序。
11.优选地,工业镜头使用基于深度学习的图形处理系统判断物料的研磨情况;通过对于研磨后物料外观的深度学习,可以使机械臂通过工业镜头自主识别物料的研磨程度,对物料是否需要继续研磨做出自主判断;若物料不需要重新研磨,则会通知操作人员收集卸料,若需要重新研磨,则会驱动机械臂进行自动重新上料工作。
12.本实用新型的有益效果有:
13.本实用新型的目的主要是针对现有技术的不足,提供一种可以自动化代替人工操作的循环上料设备,该设备可以自动完成对绝缘漆物料的数次研磨,可以大大提高研磨速度和研磨效率,同时减少操作人员与粉尘物料的接触,保护操作人员。
14.本实用新型基于传统三辊研磨机设计,在传统的三辊研磨机基础上增设了自动机械臂;自动机械臂前端设置有软铲和工业镜头,可以自动识别研磨后物料的质量,对其进行评估后判断是否需要继续研磨;若需要继续研磨则机械臂利用前端装设的软铲将物料重新放入三辊中进行研磨;本实用新型的自动化程度高,物料判断与重新研磨过程完全自动化,不需要人力监管,大大节省了人力劳动,并且降低了由于人力所带来的误差,可以提升绝缘漆研磨工序的平均质量。
15.本实用新型所使用的自动机械臂具有七个自由度,由七个结构相同的关节连接组成,可以最大化模拟人体手臂的动作,实现高精度的动作,其精度可以达到1mm级别;自动机械臂使用24v电源,负重可达15kg,关节之间可以实现全角度旋转,使机械臂的动作没有死角。
16.本实用新型的关节内使用了机电一体化的设计思想,每个关节均含有二级减速机构;由于谐波减速器具有中空的特性,因此可以采用中心孔走线的设计思想,保证各个导线可以从关节的中心穿过从而避免导线缠绕;由于各个关节位置的负载不同,对于每个关节的力矩需求不同,因此根据不同的具体需求,不同的关节所使用的电机与减速器的型号与尺寸也不同。
17.本实用新型所使用的自动机械臂使用了模块化的设计思想,每个关节的结构相同,仅在具体元件型号规格上可能有部分区别;模块化的关节设计可以提升产品的互换性,有效地提高研发效率,缩短研发周期与成本,便于生产制造与使用。
附图说明
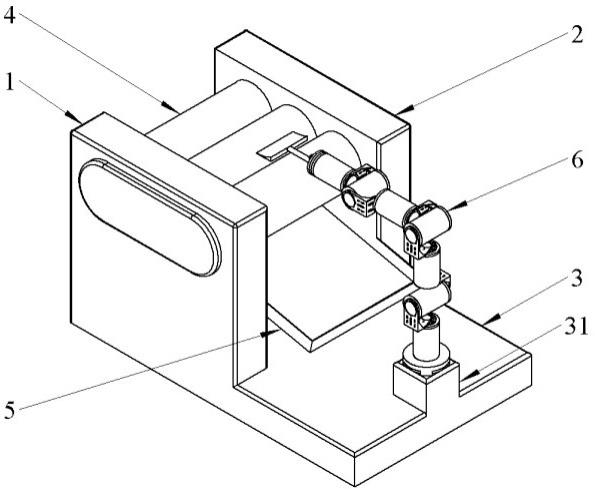
18.图1为本实用新型的整体结构示意图;
19.图2为本实用新型的自动机械臂结构示意图;
20.图3为本实用新型自动机械臂的关节结构剖视图;
21.图4为本实用新型实施例2的回收槽固定结构示意图。
22.图中:
23.前机体1;后机体2;底座3;机械臂安装底座31;三辊4;物料回收槽5;回收槽挡板51;回收槽挡板铰链52;回收槽挡板固定端53;回收槽固定端54;自动机械臂6;关节61;关节外壳611;齿轮组612;行星减速器613;驱动电机614;编码器615;制动器616;驱动器617;谐波减速器618;中心轴619;关节连接件62;固定连接件63;前端软铲64;工业镜头65。
具体实施方式
24.实施例1
25.如图1
‑
3所示,本实施例为一种绝缘漆自动化上料研磨设备,基于传统的三辊研磨机设计而成;与传统的三辊研磨机相同,本实施例中同样设置有前机体1和后机体2,前机体1和后机体2都设置在底座3上;在前机体1和后机体2之间设置有三辊4;三辊4由三根平行设置的辊组成,每个辊之间设置有极小的缝隙,在辊的自转带动下放置在辊上的物料被两辊互相挤压,实现对物料的研磨效果。
26.在底座3上,设置有机械臂安装底座31,通过固定连接件63,在机械臂安装底座31上连接设置有自动机械臂6;自动机械臂6为七自由度的机械臂结构,其最前端设置有前端软铲64和工业镜头65,其中前端软铲64用于将需要继续研磨的物料铲起重新放入三辊4上,工业镜头65用于拍摄采集物料信息,并且将拍摄到的图像进行基于深度学习的处理,识别出物料研磨是否充分,判断出那一部分的物料还需要继续研磨;发现研磨不够充分的物料时可自动控制自动机械臂6利用前端软铲64把物料铲起重新放置到三辊上。
27.自动机械臂6的结构具体如图2和图3所示,由七个关节61组成,每两个关节之间通过关节连接件62进行连接,关节连接件62可绕所连接的关节61中轴线进行旋转;每个关节61的具体结构都相同,因为不同部位对于关节61属性的需要不同,所以具体的每个关节61所使用的电机、减速器或是外壳的具体参数与型号会有所不同;每一个关节61包括圆柱状的关节外壳611,在关节外壳611的内部设置有驱动电机614,驱动电机一端连接有编码器615;驱动电机614的另一端连接到行星减速器613上,行星减速器613通过齿轮组612与中心轴619相连;中心轴619的另一侧通过齿轮组612与制动器616相连,中心轴619的输出端连接到设置在关节外壳611一端上的谐波减速器618;谐波减速器618为环形中空的结构,中心轴619也为中空的结构;中空结构有利于走线排布,可以将导线设置在中心的通孔中,避免了导线之间发生缠绕的问题。
28.在关节61内设置有驱动器617,驱动器617具体的使用copley驱动器,其具有八个接口,分别为:编码器、霍尔传感器、温度传感器、制动器、限位开关、电机接口、can通信接口和rs232接口,每个接口具体的作用如下:
29.电机接口:提供对电机的三相控制信号;
30.编码器:提供对电机的增量位置反馈,完成对电机的位置、转向追踪;
31.霍尔传感器:提供电机的绝对位置反馈,完成对电机的速度追踪;
32.温度传感器:监控电机的温度,当电机温度过高发生过热是关闭驱动器,用以保护电机防止发生过热损坏;
33.制动器:断电时用以保持电机的位置;
34.限位开关:用以限定电机的转动范围;
35.can接口:用来完成对电机的位置、速度和力矩的控制,并且完成对多个电机的组网控制。
36.驱动器617用以控制关节61内各个元件的工作情况,通过导线与各个元件以及控制台连接;导线分为两个部分,一部分是电源线,另一部分是信号线;由于谐波减速器618和中心轴619都具有中空特性,所以导线可以采用中心孔走线思想,避免发生缠绕问题。
37.在实际使用中,物料首先被放置在三辊4上进行第一次研磨,研磨之后的物料会落入物料回收槽5之内,被物料回收槽5收集在一起;自动机械臂6开始运动,并使用工业镜头65拍摄物料,分析物料是否存在研磨不充分;发现研磨不充分的物料之后,自动机械臂6使用前端软铲64将不合格的物料铲起重新放置到三辊4上进行第二次、第三次
…
第n次研磨,直至所有物料都研磨充分,质量合格;在研磨过程中,操作人员可以手动操作自动机械臂6,利用其前端软铲64清理粘附在辊上的物料粉末,避免辊上粘附过多物料粉末对辊造成影响。
38.实施例2
39.如图4所示,本实施例与实施例1所使用的技术方案并无大体不同,其主要不同点在于,本实施例中所使用的物料回收槽5的回收槽挡板51通过回收槽挡板铰链52铰接在物料回收槽5上,并且在回收槽挡板51的两端分别设置有两个回收槽挡板固定端53,配合的在物料回收槽5上也设置有两个回收槽固定端54。
40.回收槽挡板固定端53的外侧设置有磁铁,对应的在回收槽固定端54处也设置有配合的磁铁,回收槽挡板51收起时,回收槽挡板固定端53与回收槽固定端54靠近,两块磁铁互相吸引使得回收槽挡板51固定,关闭回收槽5;当需要下料时,操作人员将回收槽挡板51向外搬动,使得回收槽挡板51和回收槽5之间呈180度,物料会从倾斜的回收槽5内向外滑出,落入准备好的容器内;物料清理干净之后,操作人员合上回收槽挡板51,两块磁铁吸合,回收槽挡板51复位,完成一次下料过程。
41.以上所述,仅为结合具体实施例对本实用新型进行的详细说明,而并非是对本实用新型所做出的限定,任何本领域技术人员在本实用新型所披露的范围内,所能够轻易想到的变化或者替换方案,都应涵盖在本实用新型申请的保护范围内,因此,本实用新型保护范围应当以权利要求中所记述的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1