一种主动式旋转电解抛光设备的制作方法
1.本实用新型涉及领域,更具体涉及一种主动式旋转电解抛光设备。
背景技术:
2.电解抛光是一种对金属工件表面进行精加工的方法,该方法是将金属工件放在装有电解抛光液的电解抛光槽中,对电解抛光液通电进行电解。随着电解的进行,在金属工件表面形成粘度较大的液膜,金属工件凹凸不平的表面上液膜厚度分布不均匀,凸起部分表面上的液膜薄,而其余部分表面上的液膜厚,故阳极表面各处电阻不相同。金属工件凸起部分电阻小,电流密度较大,使凸起部分比凹陷部分溶解快。因此,粗糙不平的金属工件表面变得平滑光亮,达到抛光的效果。
3.目前在电解抛光领域,特别是不锈钢保温瓶、保温杯行业中,大多采用直线型电解抛光设备及工艺对容器内胆电解抛光处理。其通常将容器口朝上放置在导电平台上,将容器由上向下注满特定的电解液后接通电源,利用金属表面微观凸点在特定的电解液中和适当电流密度下,首先发生阳极溶解的原理进行抛光的一种电解加工。申请人指出,现有技术中的电解抛光设备均是整体驱动多个杯口朝上的杯体插入电解棒中,然后将电解液向下灌入杯体内部进行电解抛光。申请人指出现有技术均存在电解抛光时间过短且无法实现连续上下料的技术问题。
4.有鉴于此,有必要对现有技术中的电解抛光设备予以改进,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于公开一种主动式旋转电解抛光设备,用以解决传统的电解抛光设备所存在的电解抛光时间过短且无法实现连续上下料的技术问题。
6.为实现上述目的,本实用新型提供了一种主动式旋转电解抛光设备,包括:
7.第一驱动机构,被第一驱动机构所驱动并作共轴同步转动并呈平行布置的上圆盘与下圆盘,若干垂直并环形设置在下圆盘边缘处的导引机构,作共轴同步转动的若干工件框及若干电解棒,所述工件框收容杯体,所述工件框通过内置第二驱动机构的滑动块与所述导引机构滑动连接,电解棒与上圆盘相连并呈环形垂设于上圆盘的下方,所述上圆盘与下圆盘在共轴同步转动一圈时形成电解棒与杯体的内部腔体之间纵向分离的导引分离区。
8.作为本实用新型的进一步改进,所述导引机构包括:
9.垂直轨道,内置第二驱动机构的滑动块,滑动块与所述导引机构滑动连接,设置于滑动块下方的滚动机构,工件框设置于滑动块的径向外侧,所述滑动块在第二驱动机构的驱动下至少在所述导引分离区驱动滑动块依次发生下降运动与上升运动。
10.作为本实用新型的进一步改进,若干导引机构以环形等间距方式垂直布置于上圆盘与下圆盘之间,每个导引机构所配置的滑动块设置于所述垂直轨道的径向外侧。
11.作为本实用新型的进一步改进,所述导引分离区至少形成两个以上电解棒与杯体呈纵向分离的状态。
12.作为本实用新型的进一步改进,所述导引分离区中电解棒与杯体之间沿垂直方向上发生相对运动的距离大于电解棒垂直插入杯体的距离。
13.作为本实用新型的进一步改进,所述第一驱动机构与第二驱动机构受控于主控设备,所述主控设备为单片机或者plc。
14.作为本实用新型的进一步改进,所述第二驱动机构为伺服电机、气缸或者伺服电缸。
15.作为本实用新型的进一步改进,
16.还包括:环形设置于下圆盘外侧并呈圆环形的废液槽,所述废液槽由内环壁、底壁与外环壁围合而成,所述工件框呈镂空结构,并沿所述废液槽径向延伸方向收容至少一个杯体,所述杯体在工件框中呈垂直布置,且杯体所形成的开口与电解棒垂直同轴布置;呈平行布置的上圆盘与下圆盘之间设置旋转轴,所述旋转轴被第一驱动机构所驱动。
17.作为本实用新型的进一步改进,还包括:设置于废液槽底部的回液槽,所述回液槽与废液槽连通。
18.作为本实用新型的进一步改进,还包括:与旋转轴同轴设置的回转集电装置,以及与回转集电装置连接并呈放射状的若干导电板,每一个导电板连接若干组径向向外布置的电解棒,每一组电解棒的数量与同一导电板所连接的电解棒的数量相等,并均呈环形等间距放射状布置。
19.与现有技术相比,本实用新型的有益效果是:
20.在本技术中,上圆盘与下圆盘在共轴同步转动过程中在导引分离区中由第二驱动机构驱动滑动块沿垂直轨道作升降运动,从而带动容置杯体的工件框的上下运动,并最终实现了实现电解棒与杯体的内部腔体之间的纵向分离,由此解决了传统的电解抛光设备所存在的电解抛光时间过短且无法实现连续上下料的技术问题,极大地提高了对杯体的电解抛光处理效率,并能够实现自动化作业。
附图说明
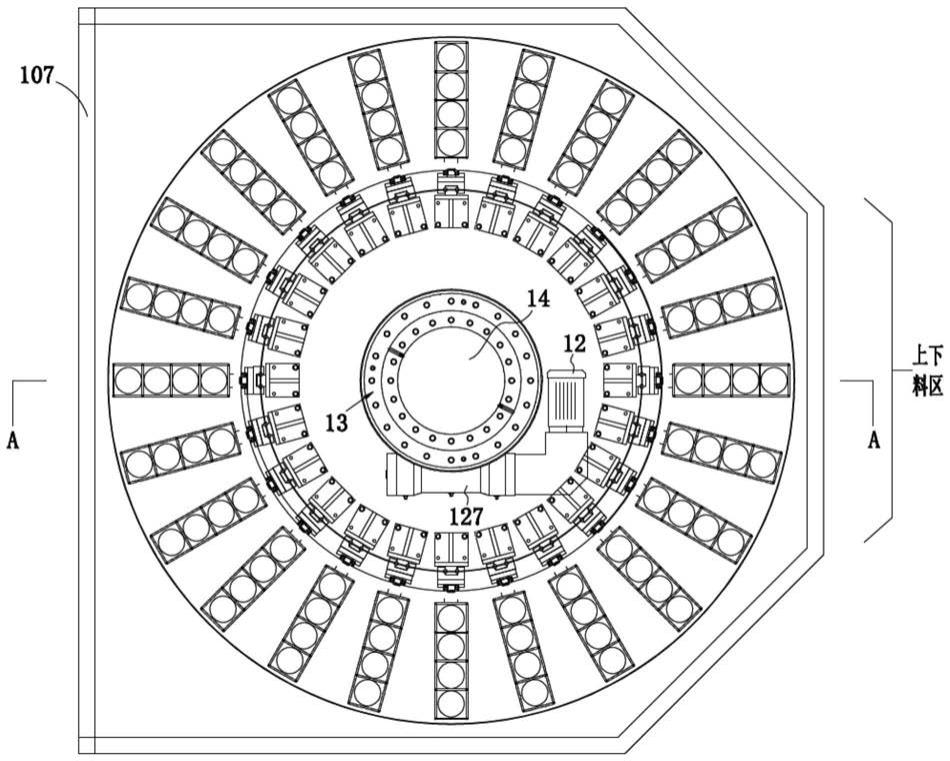
21.图1为本实用新型一种主动式旋转电解抛光设备的俯视图;
22.图2为沿图1中a
‑
a向的剖视图;
23.图3为实施例一所揭示的主动式旋转电解抛光设备中的内环壁展开后的显示导引分离区的局部示意图,并示出了部分环形布置在下圆盘边缘处的多个导引机构;
24.图4为图3中的单个导引机构与工件框装配后的主视图;
25.图5为图3中省略示出导引机构、工件框及杯体的示意图;
26.图6为仅示出围合形成废液槽的各个组件的俯视图;
27.图7为电解棒与杯体纵向分离后的示意图;
28.图8为工件框容置的四个杯口朝上的杯体沿箭头c所示出的运动方向向上运动以将电解棒纵向插入杯体的示意图;
29.图9为工件框容置的四个杯口朝上的杯体沿箭头c’所示出的运动方向向下运动以使电解棒与杯体纵向分离的示意图;
30.图10为回旋机构沿其圆心处的剖视图;
31.图11为图10所示出的回旋机构与下圆盘安装后的示意图;
32.图12为环形布置在下圆盘边缘处的多个导引机构的俯视图;
33.图13为滑动块与工件框装配后的示意图;
34.图14为滑动块与工件框装配后的俯视图;
35.图15为第一驱动机构与第二驱动机构连接主控设备的示意图。
具体实施方式
36.下面结合附图所示的各实施方式对本实用新型进行详细说明,但应当说明的是,这些实施方式并非对本实用新型的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本实用新型的保护范围之内。
37.需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”、“正方向”、“负方向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术方案的限制。术语“以上”如无特殊说明,通常包含本数。
38.参图1至图15所揭示的本实用新型一种主动式旋转电解抛光设备(以下或简称“设备”)的一种具体实施方式。
39.参图1至图3所示,在本实施例中,该主动式旋转电解抛光设备,包括:第一驱动机构,被第一驱动机构所驱动并作共轴同步转动并呈平行布置的上圆盘51与下圆盘52,若干垂直并环形设置在下圆盘52边缘处的导引机构40,作共轴同步转动的若干工件框20及若干电解棒54,工件框20收容杯体30,工件框20通过内置第二驱动机构210的滑动块21与所述导引机构40滑动连接,电解棒54与上圆盘51相连并呈环形垂设于上圆盘51的下方,所述上圆盘51与下圆盘52在共轴同步转动一圈时形成电解棒54与杯体30的内部腔体之间纵向分离的导引分离区。在本实施例中,下圆盘52与内立柱101、钢梁111以及内环壁105顶部钩持钢梁111的折弯部形成圆环形的轨道181均沿径向方向相互分离。
40.在本实施例中,所谓的“纵向”是指垂直方向,而“横向”是指水平方向。在执行电解抛光时,杯体30中需要充满电解液。当杯体30的开口向上时,可通过外置的配合用于向杯体30的开口处添加电解液的管道的机械手(未示出)将电解液注入开口向上的杯体30中,并确保电解液能够充分浸润杯体30的内壁面,防止杯体30的内壁面在电解抛光过程中出现局部的空泡、白斑等电解不良现象。
41.第一驱动机构位于该主动式旋转电解抛光设备的圆心处并位于下圆盘52的下方基座11上,外壳107与底座10连接,以围合遮蔽上圆盘51、下圆盘52、废液槽100等组件。外壳107可采用不锈钢制成。外壳107的顶部可设置一个或者多个用于抽取废气的废气抽吸口175。废气抽吸口175通过管道(未示出)与抽吸装置(未示出)连接,以将设备在连续的旋转电解抛光过程中产生的有毒有害废气排出,以确保在设备的运转区域中的空气不会危害操作人员的身体健康。
42.参图1、图2及图6所示,在本实施例中,上圆盘51与下圆盘52均为圆形且上下同心共轴布置,下圆盘52边缘处环形等间距设置二十四个导引机构40,每个导引机构40滑动连接二十四个工件框20,每个工件框20容置四个开口向上的杯体30,并对杯体30的内壁面进
行电解抛光处理。四个杯体30作为一组被滑动块21所带动并执行环形平移转动。每个导引机构40中的滑动块21中内置的第二驱动机构210均独立作动。二十四组电解棒54与上圆盘51相连并呈环形垂设于上圆盘51的下方,电解棒54与杯体30保持同步环形平移转动。
43.同时,参图2所示,该设备还包括:环形设置于下圆盘52外侧并呈圆环形的废液槽100,废液槽100由内环壁105、底壁104与外环壁103围合而成,工件框20呈镂空结构,并沿所述废液槽100径向延伸方向收容至少一个杯体30,杯体30在工件框20中呈垂直布置,且杯体30所形成的开口与电解棒54垂直同轴布置;呈平行布置的上圆盘51与下圆盘52之间设置旋转轴14,旋转轴14被第一驱动机构所驱动。
44.结合图2、图10、图11与图12所示,在本实施例中,该第一驱动机构包括:回旋机构13及驱动单元12。回旋机构13包括内圈136,与内圈136固定连接并围合内圈136的外圈134,设置于所述内圈136与外圈134之间的中圈133,所述中圈133与内圈136设置第一轴承137,所述中圈133的径向外侧设置齿轮,驱动单元12设置与中圈133的径向外侧设置的齿轮啮合的减速机构127,所述中圈133的顶部设置与所述下圆盘52连接的连接板131,所述旋转轴14连接上圆盘51与下圆盘52的圆心,并与上圆盘51与下圆盘52形成一体式结构。外圈134的边缘处形成一圈通孔135,连接板131的边缘处形成一圈通孔132,中圈133的边缘处上方形成与通孔132配合设置的上盲孔,螺栓等固定件可连续贯穿通孔132及中圈133的上盲孔,以将连接板131固定在中圈133上。内圈136的底部的边缘处设置一圈与通孔135配合的下盲孔,螺栓等固定件可连续贯穿通孔135及内圈136的下盲孔,以将内圈136与外圈134固定连接。内圈136的外侧面与中圈133的内侧面设置滑动件,该滑动件可为滚珠或者丝杠。中圈133的径向外侧设置的齿轮啮合的减速机构127,减速机构127被图1中的驱动单元12所驱动,带动下圆盘52作水平转动,并通过旋转轴14带动上圆盘51转动,从而使得上圆盘51与下圆盘52作共轴同步转动。
45.上圆盘51与下圆盘52围绕图1中轴q所在的垂直方向作水平转动,且上圆盘51与下圆盘52沿箭头d所在的方向作顺时针转动或者逆时针转动。导引机构40在本实施例中与下圆盘52固定连接,且多个导引机构40呈圆形,固定设置在下圆盘52的边缘处。导引机构40不设置伺服电机、线性马达等动力机构,并仅在第一驱动机构的驱动下,被下圆盘52所带动作圆周运动,导引机构40的滑动块21底部设置滚动机构24,并第二驱动机构210的驱动下在通过(即横向跨越)导引分离区时通过主动提升或者降低工件框20,从而依次实现电解棒54与杯体30的内部腔体之间的纵向分离与纵向插入。
46.在本实施例中,上圆盘51与下圆盘52围绕图1中轴q所在的垂直方向作水平转动中,当工件框20携带杯体30横向跨越导引分离区时形成图1中的“上下料区”,且在圆周方向上,不属于导引分离区的区域均为非导引分离区。非导引分离区中的电解棒54始终保持插入杯体30的状态,并以持续地对一圈环形布置的工件框20中的多个杯体30进行连续不间断的电解抛光处理。
47.该设备还包括:设置于废液槽100底部的回液槽109,回液槽109与废液槽100通过管道(未示出)连通,从而通过该回液槽109收集并储存从废液槽100中流出的电解液,并通过循环泵(未示出)将电解液通过管道(未示出)重新通过用于添加电解液的管道的机械手将电解液输送至杯体30中。导电板61呈放射状环形等间距分布,且导电板61的数量与工件框20的数量相等,且在俯视投影角度上,导电板61与工件框20大致呈重合状态,以确保电解
棒54能够准确地插入杯体30的开口301,并延伸入杯体30的底部。
48.参图2所示,该设备还包括:与旋转轴14同轴设置的回转集电装置60,以及与回转集电装置60连接并呈放射状的若干导电板61。具体的,在本实施例中,导电板61的数量也是二十四个。每一个导电板61连接四个径向向外布置的电解棒54,每一组电解棒54的数量与同一导电板61所连接的电解棒54的数量相等,并均呈环形等间距放射状布置。回转集电装置60位于上圆盘51的上方,并位于上圆盘51的圆心处。
49.上圆盘51与下圆盘52共轴同步转动过程中,回转集电装置60与电刷62始终保持接触,若电解棒54被配置为阴极,则工件框20被对应设置为阳极,从而使得杯体30作为阳极。具体的,杯体30在本实施例中优选为整体或者部分由不锈钢等金属材料制备。回转集电装置60与旋转轴14相互绝缘。旋转轴14的顶部形成垂直插入回转集电装置60的径缩段141。电刷62电性连接直流电源的负极,废液槽100通过导线连接直流电源的正极。
50.同时,在本实施例中,对内体30的内壁面进行电解抛光所采用的直流电源的电压为12~20v。整个电解抛光的时间为60~480秒,电解抛光的电流为30~100a。整个电解抛光的时间是指杯体30向上运动并与电解棒54纵向插入并确保杯体30内部灌满电解液的情况下,在非导引分离区中旋转所需要的时间,每个杯体30在非导引分离区中旋转所需要的时间是相等的。申请人指出还可通过提高或者降低驱动单元12的转速,以对每个杯体30的电解抛光的处理时间根据工艺需要进行任意的调节,由此显著地提高了该设备对不同工件的表面的实际情况采用不同的电解抛光时间,提高了该设备在执行电解抛光时的适应性。
51.同时,在本实施例中,该驱动单元12可采用伺服电机或者步进电机,且可采用plc或者单片机对驱动单元12进行控制,从而提高了该设备的自动化水平,并可采用上位机通过工业控制总线并基于modbus协议或者uart接口连接多个主动式电解抛光设备及其附属的受控设备,从而实现集中批量的智能化生产。
52.参图7、图13及图14所示,在本实施例中,该导引机构40包括:与下圆盘52连接的底座42、设置于底座42上的垂直轨道401,以及连接底座42与垂直轨道401的加强板41,滑动块21与所述垂直轨道401滑动连接,且滑动块21内置第二驱动机构210。垂直轨道401设置于垂直轨道401的径向内侧设置垂直布置的立柱44的径向外侧。垂直轨道401与滑动块21之间设置滑动件421,滑动件421可为滚珠或者滑轨。滑动块21下方设置滚动机构24,工件框20设置于滑动块21的径向外侧,滑动块21在第二驱动机构210的驱动下至少在所述导引分离区中以主动方式驱动滑动块21依次发生下降运动与上升运动。底座42设置四个安装孔45,以通过螺栓46贯穿安装孔45并与下圆盘52上所开设的盲孔(未示出)螺接固定。二十四个导引机构40以环形等间距方式垂直布置于上圆盘51与下圆盘52之间,每个导引机构40所配置的滑动块21设置于垂直轨道401的径向外侧。
53.参图14所示,该滑动块21包括滑动基座211,自滑动基座211垂直向下延伸的立板22,立板22的末端设置滚动机构24,该滚动机构24可为轴承。参图13所示,第二驱动机构210内置于滑动基座211的内部。滚动机构24通过横向配置的转轴23与立板22装配。同时,工件框20与滑动基座211垂直向下延伸设置的连接臂212连接,工件框20与连接臂212呈垂直设置。每一个导引机构40所悬挂的杯体30在执行电解抛光处理时,容置杯体30的工件框20所连接的滑动块21底部连接的滚动机构24与内环壁105顶部钩持钢梁111的折弯部形成圆环形的轨道181相互分离,并位于图5中轨迹115、轨迹119所在的位置。
54.在本实施例中,该废液槽100由内环壁105、底壁104与外环壁103围合而成,所述工件框20呈镂空结构,并沿废液槽100径向延伸方向收容至少一个杯体30,杯体30在工件框20中呈垂直布置,且杯体30所形成的开口与电解棒54垂直同轴布置。呈平行布置的上圆盘51与下圆盘52之间设置旋转轴14,旋转轴14被第一驱动机构所驱动。内环壁105、底壁104与外环壁103被横向搁置在内立柱101与外立柱102上。内立柱101与外立柱102的顶部设置一圈横截面为正方形的钢梁111,内环壁105与外环壁103的顶部均形成钩持钢梁111的折弯部。在导引分离区中执行杯体30的上下料操作时,导引机构40的滚动机构24可以与内环壁105顶部钩持钢梁111的折弯部形成圆环形的轨道181接触,从而使得滚动机构24在圆环形的轨道181上滚动,并为整个滑动块21、工件框20及杯体30提供支撑。外环壁103顶部钩持钢梁111的折弯部形成圆环形的轨道182。轨道181与轨道182呈同心圆形态布置。
55.废液槽100在本实施例中的作用是收集从杯体30的开口处外溢的部分电解液,环形布置的多个工件框20容置杯体30在废液槽100所围合的区域中作环形转动。当电解棒54插入杯体30的内部腔体并进行电解抛光时,滚动机构24与圆环形的轨道181相互纵向分离,但滚动机构24沿着圆环形的轨道181上方同样在执行环形平移转动。杯体30及工件框20在垂直方向上部分嵌入废液槽100中。
56.在本实施例中,导引分离区至少形成两个以上电解棒54与杯体30呈纵向分离的状态。进一步优选的,导引分离区中电解棒54与杯体30之间沿垂直方向上发生相对运动的距离大于电解棒54垂直插入杯体30的距离,从而确保在电解抛光完成时,在导引分离区中能够取下杯体30并重新向工件框20中放入未执行电解抛光处理的杯体,从而在图1所示出的上下料区中完成依次执行下料操作与上料操作。
57.参图15所示,该第一驱动机构与第二驱动机构210受控于主控设备400,所述主控设备400为单片机或者plc。第二驱动机构210为伺服电机、气缸或者伺服电缸,并最优选为伺服电机。每个第二驱动机构210可通过具绝缘层的导线(未示出)并借助导电板61与主控设备400连接。参图3、图5及图6所示,在本实施例中,该导引分离区至少形成两个以上电解棒54与杯体30呈纵向分离的状态。
58.在执行电解抛光过程中,滑动块21位于垂直轨道401的顶点附近。至于导引分离区形成电解棒54与杯体30呈纵向分离的状态的数量取决于第二驱动机构210何时驱动滑动块21向下运动,并最终使滚动机构24与圆环形的轨道181接触并在圆环形的轨道181上作水平转动。同时,导引分离区中电解棒54与杯体30之间沿垂直方向上发生相对运动的距离大于电解棒54垂直插入杯体30的距离。当第二驱动机构210驱动滑动块21向下运动时,滑动块21沿着轨迹116向下运动,此时滚动机构24与圆环形的轨道181依然相互纵向分离并使得滚动机构24逐渐向圆环形的轨道181接近(沿纵向方向),从而使得杯体30向下降落并最终实现杯体30与电解棒54的纵向分离。当第二驱动机构210驱动滑动块21向上运动时,滑动块21沿着轨迹118向上运动,此时滚动机构24从圆环形的轨道181上分离并使得滚动机构24逐渐远离圆环形的轨道181(沿纵向方向),从而使得杯体30向上升起并最终实现杯体30与电解棒54之间的纵向插入。在电解棒54与杯体30的纵向插入与分离过程中,环形布置的多个电解棒54不发生垂直方向上的纵向运动,而仅仅是杯体30相对于电解棒54发生纵向方向上的相对运动。
59.同时,参图1与图2所示,一圈环形等间距均匀分布的导引机构40所悬挂的工件框
20在图6中呈圆环形的废液槽100中作圆周运动时,依次通过导引分离区时,工件框20依次呈箭头311所在的状态(工件框20在平移过程中即将发生下降)、箭头321所在的状态(工件框20在平移过程中正在发生下降)以及箭头331所在的状态(工件框20在平移过程中下降到最低点,并开始在沿底部平直边117保持平移转动)。工件框20在箭头331所在的状态中形成两个电解棒54与杯体30呈纵向分离的状态,在此过程中,滚动机构24沿底部平直边117沿同一水平面作转动。底部平直边117属于内环壁105顶部钩持钢梁111的折弯部形成圆环形的轨道181的一段。
60.结合图3、图5与图6所示,在工件框20导引分离区中上下运动过程中,垂直轨道401并不发生垂直方向的纵向运动,滚动机构24在圆环形的轨道181上滚动时,每个导引机构40中的滚动机构24在第一驱动机构的驱动下沿箭头d所示出的方向,分别沿着轨迹115平移运动,当横向跨越过拐点1时,与滚动机构24连接的驱动滑动块21在第二驱动机构210的驱动下沿轨迹116向下运动。此时,工件框20中容置的四个开口向上的杯体30向下运动,此时第一驱动机构依然在持续地驱动上圆盘51与下圆盘52沿箭头d所示出的方向作水平转动。然后,滚动机构24继续沿着轨迹116向下运动,并横向跨越拐点2,并进入底部平直边117。
61.参图3所示,此时,电解棒54与杯体30彻底实现纵向分离,且彼此之间的纵向距离为最大。操作人员可将电解抛光处理完毕的杯体30从工件框20中取出,以完成下料操作。然后,操作人员向前一个也已经位于底部平直边117上的工件框20中装填未执行电解抛光的杯体30,以完成杯体30的上料操作。然后,随着上圆盘51与下圆盘52在第一驱动机构的驱动下并沿箭头d方向的进一步转动,导引机构40中的第二驱动机构210驱动滑动块21同时发生向上运动及环形平移运动,从而沿箭头d所示出的方向横向跨越过拐点3并沿轨迹118向上运动,由于四个一组被整体装配的电解棒54也在上圆盘51的驱动下作同步转动,因此滚动机构24沿轨迹118向上过程中,四个电解棒54会逐步对应纵向插入四个杯体30中并开始电解抛光处理。最后,第一驱动机构驱动上圆盘51与下圆盘52继续沿着箭头d所示出的方向作水平转动并在横向跨越过拐点4后,第二驱动机构210停止驱动滑动块21此时电解棒54纵向插入到杯体30的底部,并在第一驱动机构的驱动下继续沿箭头d所示出的方向转动,此时导引机构40提升工件框20并沿着轨迹119继续平移运动,并连续转动至轨迹115的位置。
62.图5中右侧的轨迹119与左侧的轨迹115首尾衔接。轨迹119与轨迹115位于同一水平面,且在此水平转动过程中,电解棒54始终保持插入杯体30的状态,并在杯体30水平环形转动过程中持续地执行电解抛光操作。
63.在本实施例中,轨迹115、轨迹116、轨迹118及轨迹119是杯体30在旋转平移过程中每个导引机构40中滑动连接的滑动块21底部所设置的滚动机构24在第一驱动机构的驱动下在转动过程中水平横向扫过的位置。因此,在轨迹115、轨迹116、轨迹118及轨迹119内,每个导引机构40的滚动机构24与轨道181始终沿纵向保持悬空,并仅在底部平直边117内导引机构40的滚动机构24才与轨道181相互接触。导引机构40的滚动机构24在轨迹116及轨迹118中与轨道181之间所形成的悬空距离小于导引机构40的滚动机构24在轨迹115及轨迹119中与轨道181之间所形成的悬空距离。
64.尤其需要说明的是,当滚动机构24沿箭头d所示出的方向在底部平直边117上水平转动时,可通过该滚动机构24减少上圆盘51与下圆盘52水平转动时的阻力,从而使得上圆盘51与下圆盘52水平转动时更加平稳。同时,滚动机构24在导引分离区中既可以与轨道181
相接触,也可以与轨道181相互分离,只要确保滚动机构24在底部平直边117(事实上该底部平直边117也可能是一段轨迹)上作水平运动时,电解棒54沿纵向方向上能够与杯体30彻底分离。
65.结合图6所示,导引分离区在本实施例中是指括号m所在的圆环段,而去除括号m所在的圆环段则形成非导引分离区。第一驱动机构设置于由内环壁105所围合形成的区域144中。在非导引分离区中,电解棒54始终保持插入杯体30的状态,并持续地进行电解抛光处理。括号m所在的圆环段可由拐点2与拐点3界定,轨迹116由拐点1与拐点2界定,轨迹118由拐点3与拐点4界定。
66.结合图7所示,在本实施例中,每一个导电板61的末端611通过锁紧件511固定并电性连接四个电解棒54,工件框20托举四个开口向上的杯体30在废液槽100上方作升降运动,参图8所示,当工件框20托举四个杯体30沿箭头c向上运动时,杯体30a上升至杯体30b所在的位置,此时电解棒54插入杯体30中。参图9所示,当工件框20托举四个杯体30沿箭头c’向下运动时,杯体30b重新下落至杯体30a所在的位置,此时电解棒54从杯体30中拔出(即实现杯体30与电解棒54的纵向分离)。导电板61可采用导电性能优异的铜等金属材料制成。
67.在本技术中,上圆盘51与下圆盘52在共轴同步转动过程中在导引分离区中由第二驱动机构210驱动滑动块21沿垂直轨道401作升降运动,从而带动容置杯体30的工件框20的上下运动,并最终实现了实现电解棒54与杯体30的内部腔体之间的纵向分离,并使得电解棒54的底部末端至少位于杯体30的开口301上方,以便于操作人员或者机器人对电解抛光处理完毕的工件执行下料操作,以及向工件框20中重新装填开口向上的杯体30的上料操作。由此解决了传统的电解抛光设备所存在的电解抛光时间过短且无法实现连续上下料的技术问题,极大地提高了对杯体30的电解抛光处理效率,并有利于实现自动化作业与集中控制。
68.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施方式的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方式或变更均应包含在本实用新型的保护范围之内。
69.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1