一种修井作业管杆智能移运装置的制作方法
1.本实用新型涉及石油工业的机械化修井作业装置,具体地说是一种修井作业管杆智能移运装置。
背景技术:
2.修井工作繁重,苦、脏、累、险伴随整个施工过程,修井工成为中国石油行业所有工种中最艰苦的工种之一。目前,油田现场的油管、油杆安装时需要对其运送到指定位置,然而现有的管杆的运送仅靠人力,工作效率慢且浪费人力。大多数油田使用传统的摆放油管设备作业,一般需要二名工人在井场上拖拉搬运油管,负责井口与油管架之间油管的排放,其工作环境恶劣,工人劳动强度大,摆放设备占地面积大,并且操作过程中管杆存放不到稳固,引发安全隐患。
3.传统油井的修井作业的缺点如下:
4.1、人工摆放油管,劳动强度很大,效率低下。
5.2、摆放设备占地面积大,征地费用高。
6.3、无自动化移运解决方案,全程人工操作,有安全隐患。
技术实现要素:
7.本实用新型为解决背景技术存在的上述技术问题而提供一种修井作业管杆智能移运装置,其具有油管、油杆自动化移运到指定位置,无需人工摆放,提高效率的优点。
8.本实用新型的技术解决方案是:本实用新型为一种修井作业管杆智能移运装置,其特殊之处在于:所述移运装置包括水平移动装置,水平移动装置包括水平主体框架、第一水平传动链轮、第二水平传动链轮、在第一水平传动链轮和第二水平传动链轮上缠绕封闭的水平链条和驱动第一水平传动链轮的水平驱动部件,第一水平传动链轮设置在水平主体框架一端,第二水平传动链轮设置在水平主体框架一端,水平链条上设置有小车,小车上设置有垂直部装。
9.进一步的,第一水平传动链轮为两个,两个第一水平传动链轮之间通过第一水平传动轴同轴连接,第二水平传动链轮为两个,两个第二水平传动链轮之间通过第二水平传动轴同轴连接,所述水平链条为两个,分别缠绕封闭在两组第一水平传动链轮和第二水平传动链轮上。
10.进一步的,水平移动装置还包括水平调节轴承座,第二水平传动链轮设置在水平调节轴承座上。
11.进一步的,小车两侧分别安装可在主体框架内滚动的滚轮。
12.进一步的,垂直部装包括垂直框架、垂直导杆、垂直驱动部件,垂直框架设置在小车上,垂直导杆侧面设置有齿条,垂直导杆垂直伸于垂直框架内,并穿过小车,垂直框架内设置有与齿条啮合的齿轮,垂直驱动部件设置在垂直框架侧面,齿轮与垂直驱动部件连接。
13.进一步的,垂直部装还包括第一限位轴、第二限位轴、第三限位和第四限位轴,第
一限位轴和第二限位轴分别水平横向设置在垂直导杆的侧面的垂直框架的上部和下部,所述第三限位和第四限位轴分别水平竖向设置在垂直导杆的侧面的垂直框架的上部和下部。
14.进一步的,垂直部装还包括第一调节轴和第二调节轴,第一调节轴为两个,分别水平横向设置在相对第一限位轴和第二限位轴的垂直导杆的另一侧面的垂直框架的上部和下部,第二调节轴为一个,水平竖向设置在相对第三限位轴和第四限位轴的垂直导杆的另一侧面的垂直框架的中部。
15.进一步的,垂直部装还包括可调节带座轴承座,第一调节轴和第二调节轴分别设置在可调节带座轴承座上。
16.进一步的,垂直部装还包括磁铁连接杆和电控磁铁,磁铁连接杆设置在垂直导杆下端,电控磁铁设置磁铁连接杆下端。
17.进一步的,移运装置为两组,成平行设置。
18.本实用新型具有以下优点:
19.1、油管、油杆自动化移运到指定位置,无需人工摆放,提高效率。
20.2、远程自动操作,磁力吸附,断电不失磁,消除安全隐患。
21.3、设备占地面积小,可立体移运存储。
附图说明
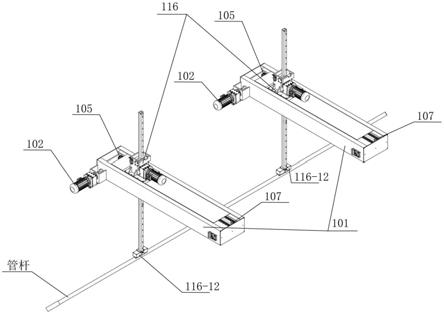
22.图1为本实用新型的总体结构示意图;
23.图2为本实用新型的水平移动装置的结构示意图;
24.图3为本实用新型的垂直部装的结构示意图;
25.图4为图3的侧视图。
26.图5为本实用新型的移运示意图一;
27.图6为本实用新型的移运示意图二;
28.图7为本实用新型的移运示意图三;
29.图8为本实用新型的移运示意图四;
30.图9为本实用新型的移运示意图五。
31.附图标记说明如下:
32.101、水平主体框架;102、水平驱动部件;103、联轴节;104、第一水平传动轴;105、第一水平传动链轮;106、第二水平传动链轮;107、水平链条;108、第二水平传动轴;109、水平调节轴承座;110、小车;111、管杆承接装置;112、管杆摆放装置;113、箱体;116、垂直部装;
33.116-01、垂直框架;116-02、齿条;116-03、齿轮;116-04、垂直驱动部件;116-05、第一限位轴;116-06、第二限位轴;116-07、第三限位轴;116-08、第四限位轴;116-09、第一调节轴;116-10、第二调节轴;116-12、电控磁铁;116-13、垂直导杆;116-14、可调节带座轴承座。
具体实施方式
34.下面结合附图和具体实施例,对本实用新型的总体方案作进一步的详细说明:
35.参见图1、2、3、4,本实用新型具体实施例的结构由两部分组成:
36.第一部分为水平移动装置,包括水平主体框架101,通过第一水平传动轴104安装在水平主体框架101一端内的两个第一水平传动链轮105,通过第二水平传动轴108、水平调节轴承座109安装在水平主体框架101另一端内的两个第二水平传动链轮106,第一水平传动链轮105和第二水平传动链轮106间缠绕封闭水平链条107,水平驱动部件102通过联轴节103和第一水平传动链轮105连接,为系统提供动力,小车110固定在水平链条107上,小车110两侧分别安装滚轮,可在主体框架101内的型材上滚动。
37.第二部分为安装在小车110上的垂直部装116,垂直部装116包括焊接件垂直框架116-01,垂直驱动部件116-04安装在垂直框架116-01侧面,齿轮116-03安装在在垂直框架116-01内,与垂直驱动部件116-04连接,垂直驱动部件116-04为系统提供动力,垂直升降动作通过安装了齿条116-02的垂直导杆116-13与齿轮116-03的啮合来实现,垂直导杆116-13垂直伸于垂直框架116-01内,并穿过小车110,安装在垂直框架116-01内部的第一限位轴116-05、第二限位轴116-06、第三限位116-07、第四限位轴116-08和第一调节轴116-09、第二调节轴116-10的联合调节来对垂直导杆116-13扶正,第一限位轴116-05和第二限位轴116-06分别水平横向设置在垂直导杆116-13的侧面的垂直框架116-01的上部和下部,第三限位116-07和第四限位轴116-08分别水平竖向设置在垂直导杆116-13的侧面的垂直框架116-01的上部和下部,第一调节轴116-09为两个,分别水平横向设置在相对第一限位轴116-05和第二限位轴116-06的垂直导杆116-13的另一侧面的垂直框架116-01的上部和下部,第二调节轴116-10为一个,水平竖向设置在相对三限位116-07和第四限位轴116-08的垂直导杆116-13的另一侧面的垂直框架116-01的中部。第一调节轴116-09和第二调节轴116-10分别设置在可调节带座轴承座116-14上。第一调节轴116-09、第二调节轴116-10三根活动轴通过可调节带座轴承座116-14的安装角度来进行扶正角度微调。电控磁铁116-12对管杆进行吸附。
38.本实用新型的移运装置以两组为佳,成平行设置。两个垂直部装116无实际连接,通过控制开始运行,同步上升或下降到指定位置,确保在移运过程中管杆的水平姿态。两个水平移动装置无实际连接,通过控制开始运行,同步运行至指定位置,水平移动装置、垂直部装116和电控磁铁116-12配合动作,完成管杆从存储位至移运位,或从移运位至存储位的动作。
39.在实际应用中,本实用新型的工作流程如图5、6、7、8和9所示。
40.本实用新型应用时,移运装置为两组,平行对称设置在管箱113顶部。工作时,首先通过水平移动装置将垂直部装116移动至放置在管杆承接装置111上的管杆的正上方,通过垂直驱动部件116-04驱动齿轮116-03,带动垂直导杆116-13向下运动,电控磁铁116-12跟随垂直导杆116-13降下,电控磁铁116-12吸附放置在管杆承接装置111上的管杆,垂直驱动部件116-04驱动齿轮116-03反向旋转,垂直导杆116-13提升至初始位置,在水平驱动部件102下,第一水平传动链轮105带动水平链条107上的小车110,安装在小车110上的垂直部装116向左移动,到达设定位置后停止,再通过垂直驱动部件116-04驱动齿轮116-03,带动垂直导杆116-13向下运动,电控磁铁116-12跟随垂直导杆116-13降下,电控磁铁116-12将管杆放置在管杆摆放装置112上,电控磁铁116-12失磁放下管杆,垂直驱动部件116-04驱动齿轮116-03反向旋转,垂直导杆116-13回到设定的初始位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1