一种钻锚机器人与掘进机会车防碰撞方法及系统
1.本发明涉及煤矿机器人防碰撞技术领域,具体涉及一种钻锚机器人与掘进机会车防碰撞方法及系统。
背景技术:
2.针对复杂地质条件煤矿巷道掘进难题,研发了一套龙门式钻锚机器人+传统悬臂式掘进机煤矿巷道快速掘进系统,该系统通过龙门式钻锚机器人和传统悬臂式掘进机协同作业,发挥掘进机与钻锚机器人各自最大优势,提高掘进效率。由于系统工作时掘进机需要从钻锚机器人内部穿行,受巷道空间限制,掘进机与钻锚机器人之间的距离较小,钻锚机器人与煤壁之间距离较小,导致会车时易发生碰撞,从而造成生产隐患。因此,构建钻锚机器人与掘进机会车系统,解决两者在会车时易发生碰撞的问题就显得极其重要。
3.目前,井下设备上所采用的主动安全防碰撞装置众多,但是均存在一定的弊端。红外测距传感器受煤矿井下煤壁吸收红外光的影响,测距效果不佳。激光测距传感器测距精度高,响应速度快,但是在井下烟雾,粉尘浓度较高,直接影响激光测距传感器的测距精度。机器视觉测距系统,受粉尘、水雾等影响,在煤矿井下使用有很大的局限性。此外,上述防碰撞装置,大多应用于防止机车与障碍物纵向发生碰撞的情况,并不适用于钻锚机器人与掘进以及巷道侧向发生碰撞的情况。
技术实现要素:
4.为解决上述问题,本发明提供了一种钻锚机器人与掘进机会车防碰撞方法及系统,利用多点位并行的超声波传感器,实现了钻锚机器人与掘进机会车过程中的碰撞检测与预警。
5.为实现上述目的,本发明采取的技术方案为:
6.一种钻锚机器人与掘进机会车防碰撞方法,通过在钻锚机器人机身内外两侧安装的多个超声波传感器实时检测其与掘进机以及巷道的距离关系,实现碰撞检测与预警;同时根据掘进机与其他物体宽度不同,剔除因工作人员以及其他因素引起无效报警信息。
7.进一步地,利用钻锚器机器人外壁左右两侧多个外壁超声波传感器,实时检测钻锚机器人机身与煤壁的距离,并利用钻锚机器人内壁的多个内壁超声波传感器实时检测钻锚器机器人与掘进机的距离关系,实现钻锚机器人与掘进机会车的过程中防碰撞预警,同时根据掘进机与其他物体宽度不同,剔除因工作人员以及其他因素引起无效报警信息。
8.进一步地,包括以下步骤:
9.s1、在钻锚机器人机身上布置多个点位并行的超声波传感器,共28个,其中,钻锚机器人两侧外壁共安装12个外壁超声波传感器,左右各6个,传感器以机器人机身中心轴线为基准呈左右分布,外壁两侧传感器安装位置相同,钻锚机器人内壁两侧共安装16个内壁超声波传感器,左右各8个,左右两侧传感器安装位置相同;
10.s2、利用钻锚器机器人外壁左右两侧多个外壁超声波传感器,实时检测钻锚机器
人机身各个位置与煤壁的距离,当达到报警门限时,声光报警器报警,具体的:
11.s201、利用rs458通信模块将传感器检测的信息传入多传感器融合信息处理器,进行信息处理,采用渡越时间(tof)算法测算钻锚机器人与煤壁之间的距离dm。
[0012][0013]
式中,c为超声波的传输速度,τ为超声波从发射到接收的时间,即超声渡越时间;为提高tof算法的检测精度,采用互相关时延估计法计算超声波渡越时间,在同一个超声测距系统中,回波信号与发射信号的频率和周期均保持不变,因此对2种信号做互相关运算,互相关函数为:
[0014][0015]
式中,t为信号周期;t为时间;f(t)为发射信号,g(t+τ)为回波信号;
[0016]
s202、判断传感器检测的距离信息dm是否达到所设定的门限值,若超过门值,声光报警器报警,提醒司机调整钻锚机器人的位姿;
[0017]
s3、利用钻锚机器人内壁的多个内壁超声波传感器实时检测钻锚器机器人与掘进机的距离关系,实现钻锚机器人与掘进机会车的过程中防碰撞预警,同时根据掘进机与其他物体宽度不同,剔除因工作人员以及其他因素引起无效报警信息,具体的:
[0018]
s301、利用rs458通信模块将钻锚机器人内壁两侧的传感器检测的信息传入多传感器融合信息处理器,进行信息处理,检测掘进机的宽度信息;
[0019]
钻锚机器人内壁两侧的16个超声波传感器两两正对,且上下齐平,在同一水平面上的两个超声波传感器构成一组宽度采集模块,则一共有八组信息采集模块,按s形分布依次记为i,ii,...viii,分别采集宽度数据,假设钻锚机器人内壁的宽度为h,当掘进机或者其他物体从钻锚机器人内部通过时,其左右两侧传感器利用渡越时间算法检测距离信息;
[0020][0021]
式中,d
l
为左侧超声波传感器检测的距离信息,dr为右侧超声波传感器检测的距离信息,t
dl
为左侧超声波传感器收到回波的时间,t
dr
为右侧超声波传感器收到回波的时间;
[0022]
当h-(d
l
+dr)超过一定阈值时,就认为有物体或者掘进机通过,并计算出其宽度l为:
[0023]
l=h-(d
l
+dr)
[0024]
s302、利用d-s证据理论融合多个超声波传感器采集的宽度信息,具体的:
[0025]
系统中超声波传感器的采样周期为0.2s,采集次数为6次,当掘进机从钻锚机器人内部通过时,其内侧的超声检测模块并行工作,以钻锚机器人最前端的检测模块i与ii为例,其余三组宽度信息融合原理与i组和ii组相同,首先得到超声检测模块6次采样数据的均值ai,aii,分别为:
[0026][0027]
式中,i,j为采样次数,l
ii
,l
iij
分别为i组和ii组传感器采集的宽度信息;
[0028]
根据以往大量试验数据的基础上,确定出i组和ii组超声检测模块的可信度概率分配值分别为mi和m
ii
,得到两组宽度采集模块的融合结果lw为:
[0029]
lw=aimi+a
iimii
[0030]
s303、根据掘进机与其他物体的宽度不同,剔除无效报警信息;
[0031]
由于掘进机的宽度与其他物体的宽度不同,若融合后的宽度信息lw在掘进机机声宽度和铲板宽度之间则保留,并判断钻锚机器人两侧传感器检测的距离d是否达到门限值,若达到门限值,利用声光报警器报警,提醒司机调整其位姿,否则继续行驶,对于超出合理范围的离群值,则直接舍弃。
[0032]
本发明还提供了一种钻锚机器人与掘进机会车防碰撞系统,该系统采用如上述的方法实现钻锚机器人与掘进机会车的会车防碰撞预警。
[0033]
本发明具有以下有益效果:
[0034]
(1)利用多超声波传感器信息融合,提高检测精度,同时剔除了无效报警信息,克服了单一传感器易引起误报警的缺点;
[0035]
(2)可以很好的适应井下的复杂环境,提高会车防碰撞预警系统的可靠性。
附图说明
[0036]
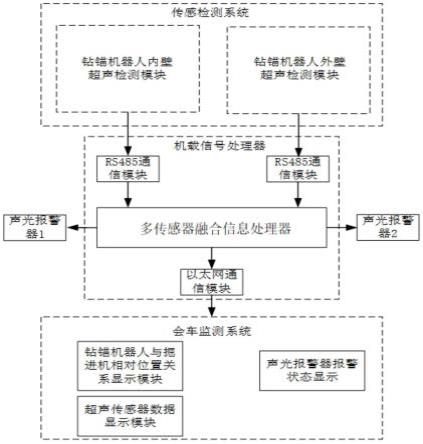
图1为本发明实施例一种钻锚机器人与掘进机会车防碰撞系统的系统框图。
[0037]
图2为本发明实施例中超声波传感器安装位置示意图;
[0038]
图中:1-巷道;2-掘进机;3-钻锚机器人;3-内壁超声波传感器;4-外壁超声波传感器。
[0039]
图3为本发明实施例中的基于d-s证据理论防碰撞预警算法流程图。
[0040]
图4为本发明实施例一种钻锚机器人与掘进机会车防碰撞方法的流程图。
具体实施方式
[0041]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
[0042]
实施例1
[0043]
如图4所示,一种钻锚机器人与掘进机会车防碰撞方法,包括以下步骤:
[0044]
s1、在钻锚机器人机身上布置多个点位并行的超声波传感器,共28个,其中,钻锚机器人两侧外壁共安装12个外壁超声波传感器,左右各6个,传感器以机器人机身中心轴线为基准呈左右分布,外壁两侧传感器安装位置相同,钻锚机器人内壁两侧共安装16个内壁超声波传感器,左右各8个,左右两侧传感器安装位置相同;安装示意图如图2所示。
[0045]
s2、利用钻锚器机器人外壁左右两侧多个外壁超声波传感器,实时检测钻锚机器人机身各个位置与煤壁的距离,当达到报警门限时,声光报警器报警,具体的:
[0046]
s201、利用rs458通信模块将传感器检测的信息传入多传感器融合信息处理器,进行信息处理,采用渡越时间(tof)算法测算钻锚机器人与煤壁之间的距离dm。
[0047][0048]
式中,c为超声波的传输速度,t为超声波从发射到接收的时间,即超声渡越时间;为提高tof算法的检测精度,采用互相关时延估计法计算超声波渡越时间,在同一个超声测距系统中,回波信号与发射信号的频率和周期均保持不变,因此对2种信号做互相关运算,互相关函数为:
[0049][0050]
式中,t为信号周期;t为时间;f(t)为发射信号,g(t+τ)为回波信号;
[0051]
s202、判断传感器检测的距离信息dm是否达到所设定的门限值,若超过门值,声光报警器报警,提醒司机调整钻锚机器人的位姿;
[0052]
s3、利用钻锚机器人内壁的多个超声波传感器实时检测钻锚器机器人与掘进机的距离关系,实现钻锚机器人与掘进机会车的过程中防碰撞预警,同时根据掘进机与其他物体宽度不同,剔除因工作人员以及其他因素引起无效报警信息,具体的:
[0053]
s301、利用rs458通信模块将钻锚机器人内壁两侧的传感器检测的信息传入多传感器融合信息处理器,进行信息处理,检测掘进机的宽度信息;
[0054]
钻锚机器人内壁两侧的16个内壁超声波传感器两两正对,且上下齐平,在同一水平面上的两个超声波传感器构成一组宽度采集模块,则一共有八组信息采集模块,按s形分布依次记为i,ii,...viii,分别采集宽度数据,假设钻锚机器人内壁的宽度为h,当掘进机或者其他物体从钻锚机器人内部通过时,其左右两侧传感器利用渡越时间算法检测距离信息;
[0055][0056]
式中,d
l
为左侧超声波传感器检测的距离信息,dr为右侧超声波传感器检测的距离信息,t
dl
为左侧超声波传感器收到回波的时间,t
dr
为右侧超声波传感器收到回波的时间;
[0057]
当h-(d
l
+dr)超过一定阈值时,就认为有物体或者掘进机通过,并计算出其宽度l为:
[0058]
l=h-(d
l
+dr)
[0059]
s302、利用d-s证据理论融合多个超声波传感器采集的宽度信息,提高宽度信息检测精度;
[0060]
如图3所示,在本系统中,被测量的目标为通过钻锚机器人内部掘进机的宽度,其在每一次的测量的过程中都是一个不确定的值,为了增加其测量精度,系统的融合思路为:在以往大量试验数据的基础上,确定出每一个超声检测模块的可信度概率分配值mk,测量时每一个超声检测模块都对被测量物体宽度值进行多周期采集,融合计算时首先对每一个
采集模块多个周期的采集数据进行均值计算,然后根据可信度概率分配值对多个超声采集模块的值进行融合计算,得到最终的融合结果;
[0061]
系统中超声波传感器的采样周期为0.2s,采集次数为6次,当掘进机从钻锚机器人内部通过时,其内侧的超声检测模块并行工作,以钻锚机器人最前端的检测模块i与ii为例,其余三组宽度信息融合原理与i组和ii组相同,首先得到超声检测模块6次采样数据的均值ai,aii,分别为:
[0062][0063]
式中,i,j为采样次数,l
ii
,l
iij
分别为i组和ii组传感器采集的宽度信息;
[0064]
根据以往大量试验数据的基础上,确定出i组和ii组超声检测模块的可信度概率分配值分别为mi和m
ii
,得到两组宽度采集模块的融合结果lw为:
[0065]
lw=aimi+a
iimii
[0066]
s303、根据掘进机与其他物体的宽度不同,剔除无效报警信息;
[0067]
由于掘进机的宽度与其他物体的宽度不同,若融合后的宽度信息lw在掘进机机声宽度和铲板宽度之间则保留,并判断钻锚机器人两侧传感器检测的距离d是否达到门限值,若达到门限值,利用声光报警器报警,提醒司机调整其位姿,否则继续行驶,对于超出合理范围的离群值,则直接舍弃。
[0068]
实施例2
[0069]
如图1所示,一种钻锚机器人与掘进机会车防碰撞系统,采用实施例1所述的会车防碰撞方法实现钻锚机器人与掘进机会车防碰撞预警,包括传感检测系统、机载信号处理器和会车监测系统;所述传感检测系统包括:
[0070]
安装在钻锚器机器人外壁左右两侧的多个超声波传感器,用于实时检测钻锚机器人机身各个位置与煤壁的距离;
[0071]
安装在钻锚机器人内壁的多个内壁超声波传感器,用于实时检测钻锚器机器人与掘进机的距离关系;
[0072]
机载信号处理器包括:
[0073]
rs458通信模块,用于将钻锚机器人外壁左右两侧的外壁超声波传感器检测的信息、钻锚机器人内壁左右两侧的内壁超声波传感器检测的信息传入多传感器融合信息处理器;
[0074]
多传感器融合信息处理器,用于:
[0075]
根据经rs458通信模块传入钻锚机器人外壁左右两侧的外壁超声波传感器检测的信息,采用渡越时间(tof)算法测算钻锚机器人与煤壁之间的距离dm;
[0076]
根据经rs458通信模块传入钻锚机器人内壁左右两侧的内壁超声波传感器检测的信息检测掘进机的宽度信息,并根据掘进机与其他物体的宽度不同,剔除无效报警信息;
[0077]
以太网通讯模块,用于实现多传感器融合信息处理器与会车监测系统之间的通信;
[0078]
会车监测系统,利用以太网实现与多传感器融合信息处理器之间的通信,用于实
时显示钻锚机器人与掘进机之间的相对位置关系、超声波传感器数据以及巷道内烟雾、粉尘、co浓度等数据。
[0079]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1