一种抽汲系统遇阻、遇卡的判定及自动化处理方法与流程
1.本发明属于油气田井下作业技术领域,涉及一种抽汲系统遇阻、遇卡的判定及自动化处理方法。
背景技术:
2.抽汲排液或抽汲诱喷是油气井常用的基本工艺技术,在各大油气田得到广泛的应用;在抽汲过程中,钢缆拉拽着抽子、加重杆等(以下简称仪器)在井中上下运动。由于井中情况复杂,经常在上提、下放过程中会遇到阻碍的情况。
3.仪器上拉过程中遇到阻碍称为遇卡,如继续上拉,会将钢缆拉伸,超过极限拉力值时会将钢缆拉断,引起事故。仪器下放过程中遇到阻碍称为遇阻(以下称为打扭),如继续下放,会使钢缆打转或者扭曲,更甚者会在井壁周围堆积、卡死,引起事故。
4.这种情况在现场中经常出现,现在的处理方法是工作人员始终注意拉力和深度的情况通过经验判定是否遇卡和打扭,再通过经验进行人工处理,这会导致抽汲作业时间长,同时也会发生人员疲劳作业或者其他疏忽,未及时发现打扭或者遇卡从而导致事故发生,存在安全隐患、引发安全事故。
5.因此,对于打扭、遇卡就需要随时对其深度、张力等进行监控,发现异常时及时作出反应,来减少安全隐患。
技术实现要素:
6.本发明为了解决上述技术问题,提供了一种抽汲系统遇阻、遇卡的判定及自动化处理方法,能及时、准确的判断,自动进行处理,解决了人工操作反应迟滞及疲劳工作的问题,减少了安全隐患。
7.本发明是通过以下技术方案来实现:
8.一种抽汲系统遇阻、遇卡的判定及自动化处理方法,包括以下步骤:
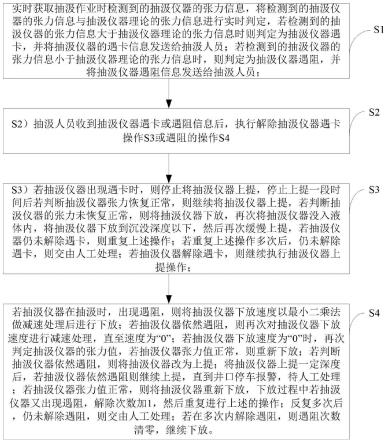
9.s1)实时获取抽汲作业时检测到的抽汲仪器的张力信息,将检测到的抽汲仪器的张力信息与抽汲仪器理论的张力信息进行实时判定,若检测到的抽汲仪器的张力信息大于抽汲仪器理论的张力信息时则判定为抽汲仪器遇卡,并将抽汲仪器的遇卡信息发送给抽汲人员;若检测到的抽汲仪器的张力信息小于抽汲仪器理论的张力信息时,则判定为抽汲仪器遇阻,并将抽汲仪器遇阻信息发送给抽汲人员;
10.s2)抽汲人员收到抽汲仪器遇卡或遇阻信息后,执行解除抽汲仪器遇卡操作s3或遇阻的操作s4;
11.s3)若抽汲仪器出现遇卡时,则停止将抽汲仪器上提,停止上提一段时间后若判断抽汲仪器张力恢复正常,则继续将抽汲仪器上提,若判断抽汲仪器的张力未恢复正常,则将抽汲仪器下放,再次将抽汲仪器没入液体内,将抽汲仪器下放到沉没深度以下,然后再次缓慢上提,若抽汲仪器仍未解除遇卡,则重复上述操作;若重复上述操作多次后,仍未解除遇卡,则交由人工处理;若抽汲仪器解除遇卡,则继续执行抽汲仪器上提操作;
12.s4)若抽汲仪器在抽汲时,出现遇阻,则将抽汲仪器下放速度以最小二乘法做减速处理后进行下放;若抽汲仪器依然遇阻,则再次对抽汲仪器下放速度进行减速处理,直至速度为“0”;
13.若抽汲仪器下放速度为“0”时,再次判定抽汲仪器的张力值,若抽汲仪器张力值正常,则重新下放;若判断抽汲仪器依然遇阻,则将抽汲仪器改为上提;将抽汲仪器上提一定深度后,若抽汲仪器依然遇阻则继续上提,直到井口停车报警,待人工处理;
14.若抽汲仪器张力值正常,则将抽汲仪器重新下放,下放过程中若抽汲仪器又出现遇阻,解除次数加1,然后重复进行上述的操作;反复多次后,仍未解除遇阻,则交由人工处理;若在多次内解除遇阻,则遇阻次数清零,继续下放。
15.将检测到的抽汲仪器的张力信息与抽汲仪器理论的张力信息进行实时判定,若检测到的抽汲仪器的张力信息小于抽汲仪器理论的张力信息的二分之一时,则判定为抽汲仪器遇阻,并将抽汲仪器遇阻信息发送给抽汲人员。
16.步骤s4)具体为:
17.s401)抽汲仪器在下放过程中,一直对抽汲仪器进行遇阻的判定,当判定抽汲仪器遇阻后,则将抽汲仪器的下放速度以最小二乘法做减速处理,减速处理后将抽汲仪器下放;
18.s402)若执行完步骤s401后,再次判断抽汲仪器下放过程,若抽汲仪器下放时仍出现了遇阻,则再次对抽汲仪器的下放速度以最小二乘法做减速处理,直至速度为“0~1m/s”;
19.s403)在速度为“0~1m/s”时,等待1~2min,再次对抽汲仪器的抽汲工作进行判定,若抽汲仪器的张力值正常,则将抽汲仪器重新下放,若抽汲仪器下放过程依然为遇阻,则将抽汲仪器改为上提;
20.s404)若将抽汲仪器上提一定深度,其中,上提深度=故障深度-300m;
21.s405)若将抽汲仪器上提后依然遇阻则继续上提,直到井口停车报警,待人工处理;
22.s406)若抽汲仪器工作时的张力值正常,则重新下放,下放过程中若又出现遇阻,解除次数加1,然后重复进行上述的操作;
23.s407)反复2次后,仍未解除遇阻,则交由人工处理;
24.s408)若在3次内解除遇阻,则遇阻次数清零,继续下放。
25.所述的抽汲仪器理论的张力信息在遇阻时,抽汲仪器理论的张力信息随深度的增加,其由重力、空气阻力和惯性等决定,采用此公示fg+f
a-f
m-fk=f
x
计算得出;
26.式中:
27.fg:下放钢缆的重力
28.fa:仪器(加重杆及抽子等)的重力
29.fm:抽子与井壁的摩擦力
30.f
x
:实时张力的值
31.fk:空气阻力
32.其中,fg与下放深度有关,fa与仪器的质量有关,fm与抽子与井壁的接触面粗糙度有关。
33.步骤s3)具体为:
34.s301)若抽汲仪器出现遇卡后,则停止将抽汲仪器上提至少1min,停止上提至少1min后,判断抽汲仪器的张力情况,若抽汲仪器的张力恢复正常,则继续将抽汲仪器上提;
35.s302)若判断抽汲仪器的张力未恢复正常,则将抽汲仪器下放,以0.5~1.0m/s的速度,再次将抽汲仪器没入液体内,将抽汲仪器下放到沉没深度以下,其中,沉没深度值增加20~30m,然后再次缓慢上提;
36.s303)若抽汲仪器仍未解除遇卡,则重复上述操作;
37.s304)若重复上述操作3次后,仍未解除遇卡,则交由人工处理;
38.s305)若重复上述操作3次内解除抽汲仪器遇卡,则继续执行抽汲仪器上提操作。
39.步骤s3)还包括以下步骤:
40.s306)若抽汲仪器解除遇卡后,修改当前沉没深度:当前沉没深度=沉没深度-50m。
41.所述的抽汲仪器理论的张力信息在遇卡时,采用此公式fz=f
y-ff+fm+fg+f
lm
进行得出;其中,fz:张力,fy:空气阻力
42.ff:在空气中的浮力
43.fm:抽子与井壁摩擦力
44.fg:重力
45.f
lm
:流体的摩擦力。
46.与现有技术相比,本发明具有以下有益的技术效果:
47.本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法,对井中的仪器运动、受力情况进行了直观的分析,针对受力的分析可以将计算值与实际受力进行比较,做出遇阻、遇卡的判断,对遇阻、遇卡进行自动化处理,不再需要人工时刻对深度、张力等进行监控,发现异常时自动作出反应,自动控制能做到早发现、及时、准确的判断,自动进行处理,解决了人工操作反应迟滞及疲劳工作的问题,减少了安全隐患。
附图说明
48.图1为本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法的流程图;
49.图2为本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法中遇阻的判断流程图;
50.图3为本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法的中遇阻的自动化处理方法流程图;
51.图4为本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法中遇卡的判断流程图;
52.图5为本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法中遇卡的自动化处理方法的流程图。
具体实施方式
53.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
54.实施例1:
55.参见图1至图5,一种抽汲系统遇阻、遇卡的判定及自动化处理方法,包括以下步骤:
56.s1)实时获取抽汲作业时检测到的抽汲仪器的张力信息,将检测到的抽汲仪器的张力信息与抽汲仪器理论的张力信息进行实时判定,若检测到的抽汲仪器的张力信息大于抽汲仪器理论的张力信息时则判定为抽汲仪器遇卡,并将抽汲仪器的遇卡信息发送给抽汲人员;若检测到的抽汲仪器的张力信息小于抽汲仪器理论的张力信息时,则判定为抽汲仪器遇阻,并将抽汲仪器遇阻信息发送给抽汲人员。
57.s2)抽汲人员收到抽汲仪器遇卡或遇阻信息后,执行解除抽汲仪器遇卡操作s3或遇阻的操作s4。
58.s3)若抽汲仪器出现遇卡时,则停止将抽汲仪器上提,停止上提一段时间后若判断抽汲仪器张力恢复正常,则继续将抽汲仪器上提,若判断抽汲仪器的张力未恢复正常,则将抽汲仪器下放,再次将抽汲仪器没入液体内,将抽汲仪器下放到沉没深度以下,然后再次缓慢上提,若抽汲仪器仍未解除遇卡,则重复上述操作;若重复上述操作多次后,仍未解除遇卡,则交由人工处理;若抽汲仪器解除遇卡,则继续执行抽汲仪器上提操作;
59.具体实施为:s301)若抽汲仪器出现遇卡后,则停止将抽汲仪器上提至少1min,停止上提至少1min后,判断抽汲仪器的张力情况,若抽汲仪器的张力恢复正常,则继续将抽汲仪器上提;
60.s302)若判断抽汲仪器的张力未恢复正常,则将抽汲仪器下放,以0.5~1.0m/s的速度,再次将抽汲仪器没入液体内,将抽汲仪器下放到沉没深度以下,其中,沉没深度值增加20~30m,然后再次缓慢上提;
61.s303)若抽汲仪器仍未解除遇卡,则重复上述操作;
62.s304)若重复上述操作3次后,仍未解除遇卡,则交由人工处理;
63.s305)若重复上述操作3次内解除抽汲仪器遇卡,则继续执行抽汲仪器上提操作;
64.s306)若抽汲仪器解除遇卡后,修改当前沉没深度:当前沉没深度=沉没深度-50m。
65.所述的抽汲仪器理论的张力信息在遇卡时,采用此公式fz=f
y-ff+fm+fg+f
lm
进行得出;其中,fz:张力,fy:空气阻力
66.ff:在空气中的浮力
67.fm:抽子与井壁摩擦力
68.fg:重力
69.f
lm
:流体的摩擦力
70.fm抽子与井壁摩擦力与正压力、动摩擦因数有关
71.ff空气中的浮力仪器和液体总重量、气体密度、钢体密度、积液密度有关;
72.s4)若抽汲仪器在抽汲时,出现遇阻,则将抽汲仪器下放速度以最小二乘法做减速处理后进行下放;若抽汲仪器依然遇阻,则再次对抽汲仪器下放速度进行减速处理,直至速度为“0”;
73.若抽汲仪器下放速度为“0”时,再次判定抽汲仪器的张力值,若抽汲仪器张力值正常,则重新下放;若判断抽汲仪器依然遇阻,则将抽汲仪器改为上提;将抽汲仪器上提一定深度后,若抽汲仪器依然遇阻则继续上提,直到井口停车报警,待人工处理;
74.若抽汲仪器张力值正常,则将抽汲仪器重新下放,下放过程中若抽汲仪器又出现遇阻,解除次数加1,然后重复进行上述的操作;反复多次后,仍未解除遇阻,则交由人工处理;若在多次内解除遇阻,则遇阻次数清零,继续下放。需要说明的是,所述的抽汲仪器理论的张力信息在遇阻时,抽汲仪器理论的张力信息随深度的增加,其由重力、空气阻力和惯性等因素决定,采用此公示fg+f
a-f
m-fk=f
x
计算得出;
75.式中:
76.fg:下放钢缆的重力
77.fa:仪器(加重杆及抽子等)的重力
78.fm:抽子与井壁的摩擦力
79.f
x
:实时张力的值
80.fk:空气阻力
81.其中,fg与下放深度有关,fa与仪器的质量有关,fm与抽子与井壁的接触面粗糙度有关。
82.进一步地,若检测到的抽汲仪器的张力信息小于抽汲仪器理论的张力信息的二分之一时,则判定为遇阻;当判定为遇阻后则执行以下操作:s401)抽汲仪器在下放过程中,一直对抽汲仪器进行遇阻的判定,当判定抽汲仪器遇阻后,则将抽汲仪器的下放速度以最小二乘法做减速处理,减速处理后将抽汲仪器下放;
83.s402)若执行完步骤s401后,再次判断抽汲仪器下放过程,若抽汲仪器下放时仍出现了遇阻,则再次对抽汲仪器的下放速度以最小二乘法做减速处理,直至速度为“0~1m/s”;
84.s403)在速度为“0~1m/s”时,等待1~2min,再次对抽汲仪器的抽汲工作进行判定,若抽汲仪器的张力值正常,则将抽汲仪器重新下放,若抽汲仪器下放过程依然为遇阻,则将抽汲仪器改为上提;
85.s404)若将抽汲仪器上提一定深度,其中,上提深度=故障深度-300m;
86.s405)若将抽汲仪器上提后依然遇阻则继续上提,直到井口停车报警,待人工处理;
87.s406)若抽汲仪器工作时的张力值正常,则重新下放,下放过程中若又出现遇阻,解除次数加1,然后重复进行上述的操作;
88.s407)反复2次后,仍未解除遇阻,则交由人工处理;
89.s408)若在3次内解除遇阻,则遇阻次数清零,继续下放。
90.实施例2:
91.参见图1至图5,一种抽汲系统遇阻、遇卡的判定及自动化处理方法中遇阻的判定及处理:实现自动化判定遇阻的情况需要对仪器在井中的受力进行分析,判定在检测到的抽汲仪器的张力信息小于抽汲仪器理论的张力信息时有可能出现遇阻。
92.当抽汲作业下放时,当张力计检测到抽汲仪器的张力信息小于等于抽汲仪器理论的张力信息的一半时,判定为遇阻,此时就该执行下面自动化处理方法。
93.抽汲仪器理论的张力信息的计算:
94.当仪器随钢缆下放到井中时,钢缆下放进入井中随深度的增加,需考虑重力、空气阻力、惯性影响等因素。将这些因素综合考虑,可计算出实时下放抽汲仪器理论的张力信
息,即张力值。
95.fg+f
a-f
m-fk=f
x
96.式中:
97.fg:下放钢缆的重力
98.fa:仪器(加重杆及抽子等)的重力
99.fm:抽子与井壁的摩擦力
100.f
x
:实时张力的计算值
101.fk:空气阻力
102.其中,fg与下放深度有关,fa与仪器的质量有关,fm与抽子与井壁的接触面粗糙度有关。
103.空气阻力计算:
104.空气阻力由气柱静压力、气体浮力、轴向应力、紊流压力、惯性影响等力矢量求和。
105.f
kz
=f
jy
+f
fl
+f
zy
+f
wl
+f
gx
106.其中,f
kz
:空气阻力;f
jy
:气柱静压力;f
fl
:气体浮力;f
zy
:轴向应力;f
wl
:紊流压力;f
gx
:惯性影响。
107.参见图2至图3,一种抽汲系统遇阻、遇卡的判定及自动化处理方法中解除遇阻方法包括以下步骤:
108.1)仪器下放过程中,一直进行遇阻的判定,当判定遇阻后,下放速度以最小二乘法做减速处理;
109.2)再次判断后若依然遇阻,则再次以最小二乘法做减速处理,直至速度为“0”;
110.3)当速度为“0”时,等待1~2min,再次判定,若张力值正常,则重新下放;若依然遇阻,则改为上提。
111.4)上提一定深度,显示到达深度=故障深度-300m;
112.5)若依然遇阻则继续上提,直到井口停车报警,待人工处理;
113.6)若张力数据正常,重新下放,下放过程中若又出现遇阻,解除次数加1,则重复进行上述的操作;
114.7)反复2次后,仍未解除遇阻,则交由人工处理;
115.8)若在3次内解除遇阻,则遇阻次数清零,继续下放。
116.参见图4至图5,一种抽汲系统遇阻、遇卡的判定及自动化处理方法中遇卡预判及处理
117.实现自动化判定遇卡的情况,需要对仪器在井中下放至沉没深度后,仪器的抽子带动一部分积液进行上提。上提过程中的受力进行分析,检测到的抽汲仪器的张力信息与抽汲仪器理论的张力信息进行实时判定,若检测到的抽汲仪器的张力信息大于抽汲仪器理论的张力信息时则判定为抽汲仪器遇卡。需要说明的是,抽汲仪器指的是抽子,具体的过程:
118.下放抽子至沉没深度(如200~300m),等1分钟以后以1.5~2m/s的速度快速上提抽子,此时抽子张开,在油管内部形成密封,带起部分积液上行,上行至井口后将积液排出。
119.抽子上提时在水中浮力大于在空气中的浮力,故张力最大点是刚提出液面此时积液未洒出,浮力为空气浮力,张力达到最大值。
120.抽子提出积液液面时的受力分析
121.实际流体是有粘性的,流动过程中不同速度的流体之间,由于粘性作用会产生动量交换,使速度快是流体变慢。速度慢的变快,而流体流经实体时,由于粘性的作用,贴近实体的流体会滞止,速度为零,从而使周围的流体速度也减小,形成阻力。
122.张力计算公式为fz=f
y-ff+fm+fg+f
lm
,其中,fz:张力,fy:空气阻力ff:在空气中的浮力;fm:抽子与井壁摩擦力;fg:重力;f
lm
:流体的阻力。
123.流体的阻力
124.流体具有粘性,流动时存在内摩擦,固定的管壁或其他形状固体壁面促使流动的流体内部产生相对运动,产生了流体的阻力。流体阻力的大小与流体本身的物理性质、流动状况及壁面的形状等因素有关;通常分为两类
125.直管阻力:流体经过一定管径的直管时,由于客服流体的粘滞性及与管内壁摩擦而产生的阻力。存在于沿流动方向的整个长度上,记为h
fz
。
126.局部阻力:流体绕过固体表面的阻力为摩擦阻力与形体阻力之和。流体流经管路中的管件及管截面的突然扩大或缩小等局部地方产生的阻力。记为h
fj
127.流动阻力∑hf,用伯努利方程表示:
128.∑hf=h
fz
+h
fj
129.参见图5,一种抽汲系统遇阻、遇卡的判定及自动化处理方法中解除遇卡的步骤:
130.1)出现遇卡后,停止上提1min,若张力恢复正常,则继续上提。
131.2)若张力未恢复正常,则将仪器下放,以0.5~1.0m/s的速度,再次将抽子没入液体内,下放到沉没深度以下(沉没深度值增加20~30m),然后再次缓慢上提;
132.3)若仍未解除遇卡,则重复上面操作;
133.4)反复3次后,仍未解除遇卡,则交由人工处理;
134.5)若3次内解除遇卡,继续上提操作;
135.6)解除遇卡后,修改当前沉没深度:沉没深度=沉没深度-50(m)。
136.需要说明的是,由于每个井的井况不同,要实现自动化处理遇阻、遇卡首先需要将抽汲井的已知数据输入到抽汲系统控制器中,由抽汲系统控制器计算井中的各项数据。然后由人工上提、下放工作一次,对抽汲系统控制器中计算的数据进行校准。同时需要对实时的深度,实时的张力情况进行精确、准确的测量。并将检测到的数值实时的发送至抽汲系统控制器中,并控制绞车做出相应的运动。
137.本发明提供的抽汲系统遇阻、遇卡的判定及自动化处理方法,其使用检测到的抽汲仪器的张力信息与抽汲仪器理论的张力信息进行实时判定的方式,能够及时的在上提遇卡,下放遇阻时发现问题并做出相应的反映并加以排除,如出现问题未解决则停机等待人工处理。
138.因此对于遇阻、遇卡的自动化处理可以有效的解决这一问题,不再需要人工时刻对深度、张力等进行监控,发现异常时及时作出反应,自动控制能做到早发现、及时、准确的判断,自动进行处理,解决了人工操作反应迟滞及疲劳工作的问题,减少了安全隐患。
139.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变
化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1