一种用于土石岩层钻进的一键自动接卸钻杆的控制方法与流程
1.本发明属于土层或岩石的钻进技术领域,具体涉及一种用于土石岩层钻进的一键自动接卸钻杆的控制方法。
背景技术:
2.在矿山开采工程中,需要在土层或岩石进行钻进,通过钻杆的钻进实现矿物的开采,中深孔无底柱崩落法开采是一种常见的开采方法,中深孔无底柱崩落法的主要特点是,提前使用掘进钻车掘进水平巷道,然后使用中深孔钻车进行向上钻孔开采工作,采矿钻车向上开采钻孔,开采钻孔过程中,钻孔深度一般在几米到几十米之间,一根钻杆无法实现采矿所需要的钻孔深度,在钻孔过程中需要频繁地进行接、卸钻杆操作,接卸钻杆的装置的结构以专利cn201820925830.9凿岩机储换杆机构为例,进行说明,包括夹爪臂角度传感器wan3、单杆槽接近开关b126、双杆槽接近开关b127、锁定油缸位置检测接近开关b125、驻停油缸、分度油缸、锁定油缸、耦合器、以及夹爪;目前使用的接、卸钻杆方法包括有两种:一种是人工接、卸钻杆,这种人工接、卸钻杆的时,接、卸钻杆的操作人员需要到钻孔工作面的正下方进行操作,而该位置经常会有碎石、浮石掉下来,对操作人员来说非常危险,同时每根钻杆的重量都在几十斤以上,接、卸钻杆对工作人员来说费时费力、危险程度高;另一种是采用双手柄操作接、卸钻杆,但双手柄操作动作繁琐,在每次接、卸钻杆时都需要执行12次操作,操作步骤繁琐,在操作过程中效率较低且容易出错。
3.双手柄操作接、卸钻杆,具体操作步骤如下:s1、操作手柄使电磁阀y303a得电控制夹爪臂回到驻停位置,远离凿岩机中心;s2、操作手柄使电磁阀y304a得电伸出分度油缸;s3、操作手柄使电磁阀y306得电给耦合器加压;s4、操作手柄使电磁阀y304b得电收回分度油缸,旋转储杆库到夹爪臂可以抓到钻杆的位置;s5、操作手柄使电磁阀y305a得电插入锁定油缸;s6、等待电磁阀y306失电耦合器释放压力;s7、操作手柄使电磁阀y301a得电,打开夹爪;s8、操作手柄使电磁阀y303b得电,夹爪臂到凿岩机中心;s9、操作手柄使电磁阀y302a得电,夹爪臂到储杆库外圈或中圈或内圈有钻杆位置;s10、操作手柄使电磁阀y301b得电,夹爪闭合抓住储杆库钻杆;s11、操作手柄使电磁阀y302b得电,夹爪臂到凿岩机中心;s12、点动按钮使电磁阀y307得电,夹爪成浮动状态;最后操作其它手柄拧入钎尾与钻杆库螺纹,完成接杆操作。
4.在每次的接杆过程中,均需要重复以上s1~s12的操作,需要多次进行手柄的操作,工序繁琐,容易出错,操作难度大,操作效率低。
5.其中涉及到多组电磁阀的安装,电磁阀包括a、b两个出油端,电磁阀a与电磁阀b代表电磁阀开启的不同方向,通过电磁阀a得电或电磁阀b得电分别控制执行机构的执行相反的动作。
技术实现要素:
6.本发明的目的在于提供一种用于土石岩层钻进的一键自动接卸钻杆的控制方法,旨在解决双手柄操作接、卸钻杆工序繁琐,容易出错,操作难度大,操作效率低等问题。
7.为实现上述目的,本发明采用的技术方案是:提供一种用于土石岩层钻进的一键自动接卸钻杆的控制方法,包括以下步骤:s1,进行接钻杆操作,确定用于检测夹爪臂位置的夹爪臂角度传感器wan3是否在设定的零点位置,确定用于检测单杆槽状态的接近开关b126和用于检测双杆槽状态的接近开关b127的状态,接近开关b126结合接近开关b127还用于检测三杆槽状态,结合接近开关b126与接近开关b127的状态,分辨此时储杆器在单杆槽、双杆槽或三杆槽的位置;s2,夹爪臂自储杆器中抓取钻杆,运输至凿岩机中心位置,人工操作夹钎器旋钮和旋转凿岩机钎尾旋钮,将储杆器抓取的钻杆的螺纹与原凿岩机内的钻杆的螺纹拧紧,完成接杆工作,返回到初始状态;s3,开始钻孔操作,电磁阀y304a得电,分度油缸伸出,延时后,电磁阀y306得电耦合器加压,检测到用于检测耦合压力的压力变送器b140达到设定值后,电磁阀y305a得电,锁定油缸拔出,检测到用于检测锁定油缸位置的接近开关b125信号为真时,锁定油缸拔出,电磁阀y304b得电,分度油缸缩回,延时后,电磁阀y305b得电,锁定油缸插入,此时接近开关b125信号为假,电磁阀y306断电,释放耦合压力,等待下一循环取杆操作;s4,进行卸钻杆操作,确定用于检测夹爪臂角度传感器wan3是否在设定的零点位置,确定接近开关b126和接近开关b127的状态,结合接近开关b126与接近开关b127的状态,分辨此时储杆器的位置;s5,夹爪臂旋转到凿岩机中心位置,夹爪臂抓取待拆卸钻杆,将待拆卸钻杆的螺纹拧松,夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,将待拆卸钻杆放入单杆槽、双杆槽或三杆槽内,完成后,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽位置,等待下一循环卸钻杆操作。
8.在一种可能的实现方式中,步骤s2中,夹爪臂进行钻杆抓取操作,具体操作如下:电磁阀y301a得电夹爪打开,电磁阀y302a、电磁阀y303a得电,通过夹爪臂角度传感器wan3的值判断确定单杆槽、双杆槽或三杆槽的位置,夹爪臂旋转到单杆槽、双杆槽或三杆槽处,单杆槽、双杆槽或三杆槽的位置由夹爪臂角度传感器wan3的值判断确定,到达单杆槽、双杆槽或三杆槽位置后,电磁阀y301b得电,夹爪闭合,从单杆槽、双杆槽或三杆槽位置抓取一根钻杆,电磁阀y302b得电,抓住钻杆的夹爪臂从单杆槽、双杆槽或三杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3的值判断确定;完成接杆工作,电磁阀y303b得电,夹爪臂返回到零点位置。
9.在一种可能的实现方式中,接近开关b126信号为真,接近开关b127信号为假,储杆器在单杆槽位置,此时执行单杆槽位置的接杆程序一,夹爪臂进行钻杆抓取操作,完成后,开始钻孔工作。
10.在一种可能的实现方式中,接近开关b126信号为假,接近开关b127信号为真,储杆器在双杆槽位置,此时执行双杆槽位置的接杆程序二,夹爪臂进行钻杆抓取操作,从双杆槽位置外圈抓取一根钻杆,并记录抓取次数为1,完成后,开始钻孔工作,钻孔完毕后,需要接钻杆时,夹爪臂进行钻杆抓取操作,从双杆槽位置里圈抓取剩余的一根钻杆,并记录抓取次数为2,说明双杆槽内已没有钻杆,完成后,开始钻孔工作。
11.在一种可能的实现方式中,接近开关b126信号为真,接近开关b127信号为真,储杆器在三杆槽位置,此时执行三杆槽位置的接杆程序三,夹爪臂进行钻杆抓取操作,从三杆槽位置外圈抓取一根钻杆,并记录抓取次数为1,完成后,开始钻孔工作,钻孔完毕后,需要接钻杆时,夹爪臂进行钻杆抓取操作,从三杆槽位置中圈抓取一根钻杆,并记录抓取次数为2,完成后,开始钻孔工作后,钻孔完毕后,需要接钻杆时,夹爪臂进行钻杆抓取操作,从三杆槽位置里圈抓取一根钻杆,并记录抓取次数为3,说明三杆槽内已没有钻杆,完成后,开始钻孔工作。
12.在一种可能的实现方式中,夹爪臂抓取待拆卸钻杆,具体操作如下:电磁阀y301a得电夹爪打开,电磁阀y303b得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b得电夹爪闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302b得电夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,由夹爪臂角度传感器wan3判断单杆槽、双杆槽或三杆槽位置,把钻杆放入单杆槽、双杆槽或三杆槽,在单杆槽、双杆槽或三杆槽内表面摩擦力的作用下,夹爪打开移走后,钻杆会卡装在单杆槽、双杆槽或三杆槽内。
13.在一种可能的实现方式中,储杆器旋转,具体操作如下:电磁阀y304b 得电,分度油缸收回,电磁阀y306得电,耦合器加压,压力变送器b140检测到耦合器压力达到设定值后,电磁阀y305a得电,锁定油缸拔出,检测到用于检测锁定油缸位置的接近开关b125信号为真时,锁定油缸完全拔出,电磁阀y304a得电,分度油缸伸出,延时后,电磁阀y305b得电,锁定油缸插入,此时接近开关b125信号为假,电磁阀y306断电,释放耦合压力,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽内,等待下一循环卸钻杆操作。
14.在一种可能的实现方式中,接近开关b126信号为真,接近开关b127信号为假,储杆器在单杆槽位置,此时执行单杆槽位置的卸杆程序一,夹爪臂抓取待拆卸钻杆,储杆器旋转,等待下一循环卸钻杆操作。
15.在一种可能的实现方式中,接近开关b126信号为假,接近开关b127信号为真,储杆器在双杆槽位置,此时执行双杆槽位置的卸杆程序二,夹爪臂抓取待拆卸钻杆,夹爪臂抓住钻杆运动到双杆槽内圈位置,并记录次数为1,重复夹爪臂抓取待拆卸钻杆,夹爪臂抓住钻杆运动到双杆槽外圈位置,并记录次数为2,储杆器旋转,等待下一循环卸钻杆操作。
16.在一种可能的实现方式中,接近开关b126信号为真,接近开关b127信号为真,储杆器在三杆槽位置,此时执行三杆槽位置的卸杆程序三,夹爪臂抓取待拆卸钻杆,夹爪臂抓住钻杆运动到三杆槽内圈位置,并记录次数为1,重复夹爪臂抓取待拆卸钻杆,夹爪臂抓住钻杆运动到三杆槽中圈位置,并记录次数为2,重复夹爪臂抓取待拆卸钻杆,夹爪臂抓住钻杆运动到三杆槽外圈位置,并记录次数为3,储杆器旋转,等待下一循环卸钻杆操作。
17.本发明提供的一种用于土石岩层钻进的一键自动接卸钻杆的控制方法的有益效果在于:与现有技术相比,进行接钻杆操作时,检测接近开关b126和接近开关b127的状态,
结合接近开关b126与接近开关b127的状态,分辨此时储杆器在单杆槽、双杆槽或三杆槽的位置,夹爪臂抓取钻杆,运输至凿岩机中心位置,将储杆器抓取的钻杆的螺纹与原凿岩机内的钻杆的螺纹拧紧,完成接杆工作;进行卸钻杆操作,检测接近开关b126和接近开关b127的状态,结合接近开关b126与接近开关b127的状态,分辨此时储杆器的位置,夹爪臂旋转到凿岩机中心位置,夹爪臂抓取待拆卸钻杆,将待拆卸钻杆的螺纹拧松,夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,将待拆卸钻杆放入单杆槽、双杆槽或三杆槽内,完成后,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽位置;操作简单易行,极大地降低了工作强度以及误操作率。
附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
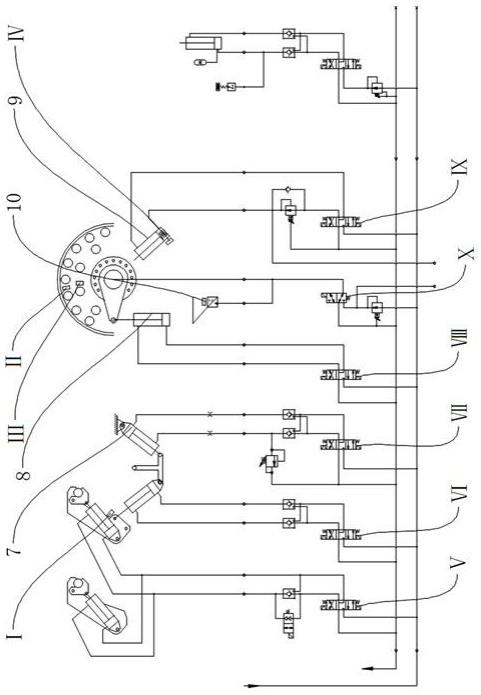
19.图1为本发明实施例提供的一键自动接卸钻杆的控制方法的控制原理图;图2为本发明实施例提供的一键自动接卸钻杆的控制方法程序流程图;图3为本发明实施例提供的接杆程序一的程序流程图;图4a、图4b两者组合为本发明实施例提供的接杆程序二的程序流程图;图5a、图5b两者组合为本发明实施例提供的接杆程序三的程序流程图;图6为本发明实施例提供的卸杆程序一的程序流程图;图7a、图7b两者组合为本发明实施例提供的卸杆程序二的程序流程图;图8a、图8b两者组合为本发明实施例提供的卸杆程序三的程序流程图的程序流程图。
20.图中:ⅰ、夹爪臂角度传感器wan3;ⅱ、接近开关b126;ⅲ、接近开关b127;ⅳ、接近开关b125;
ⅴ
、电磁阀y301a/b;ⅵ、电磁阀y302a/b;ⅶ、电磁阀y303a/b;
ⅷ
、电磁阀y304a/b;
ⅸ
、电磁阀y305a/b;
ⅹ
、电磁阀y306;5、耦合器;6、夹爪;7、驻停油缸;8、分度油缸;9、锁定油缸(其中,电磁阀a/b表示电磁阀的a状态或电磁阀的b状态,电磁阀在工作时,执行其中一种状态)。
具体实施方式
21.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
22.请参照图1至图8b,现对本发明提供的一种用于土石岩层钻进的一键自动接卸钻杆的控制方法的一种具体实施方式进行说明,包括以下步骤:s1,进行接钻杆操作,按下单独设置的接杆按钮,确定用于检测夹爪臂位置的夹爪臂角度传感器wan3ⅰ是否在设定的零点位置,确定用于检测单杆槽状态的接近开关b126ⅱ和用于检测双杆槽状态的接近开关b127ⅲ的状态,接近开关b126ⅱ结合接近开关b127ⅲ还用于检测三杆槽状态,结合接近开关b126ⅱ与接近开关b127ⅲ的状态,分辨此时储杆器在
单杆槽、双杆槽或三杆槽的位置;s2,夹爪臂自储杆器中抓取钻杆,运输至凿岩机中心位置,人工操作夹钎器旋钮和旋转凿岩机钎尾旋钮,将储杆器抓取的钻杆的螺纹与原凿岩机内的钻杆的螺纹拧紧,完成接杆工作,返回到初始状态;s3,开始钻孔操作,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y306
ⅹ
得电耦合器5加压,检测到用于检测耦合压力的压力变送器b140达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到用于检测锁定油缸9位置的接近开关b125ⅳ信号为真时,锁定油缸9拔出,电磁阀y304b
ⅷ
得电,分度油缸8缩回,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,等待下一循环取杆操作;s4,进行卸钻杆操作,按下单独设置的卸杆按钮,确定用于检测夹爪臂角度传感器wan3ⅰ是否在设定的零点位置,确定接近开关b126ⅱ和接近开关b127ⅲ的状态,结合接近开关b126ⅱ与接近开关b127ⅲ的状态,分辨此时储杆器的位置;s5,夹爪臂旋转到凿岩机中心位置,夹爪臂抓取待拆卸钻杆,将待拆卸钻杆的螺纹拧松,夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,将待拆卸钻杆放入单杆槽、双杆槽或三杆槽内,完成后,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽位置,等待下一循环卸钻杆操作。
23.本发明提供的一种用于土石岩层钻进的一键自动接卸钻杆的控制方法,与现有技术相比,进行接钻杆操作时,检测接近开关b126ⅱ和接近开关b127ⅲ的状态,结合接近开关b126ⅱ与接近开关b127ⅲ的状态,分辨此时储杆器在单杆槽、双杆槽或三杆槽的位置,夹爪臂抓取钻杆,运输至凿岩机中心位置,将储杆器抓取的钻杆的螺纹与原凿岩机内的钻杆的螺纹拧紧,完成接杆工作;进行卸钻杆操作,检测接近开关b126ⅱ和接近开关b127ⅲ的状态,结合接近开关b126ⅱ与接近开关b127ⅲ的状态,分辨此时储杆器的位置,夹爪臂旋转到凿岩机中心位置,夹爪臂抓取待拆卸钻杆,将待拆卸钻杆的螺纹拧松,夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,将待拆卸钻杆放入单杆槽、双杆槽或三杆槽内,完成后,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽位置;操作简单易行,极大地降低了工作强度以及误操作率。
24.请参照图2,进行接卸钻杆操作前,需要进行系统初始化操作,检测夹爪臂位置的夹爪臂角度传感器wan3ⅰ是否断线或短路,检测单杆槽位置的接近开关是否断线或短路,检测双杆槽位置的接近开关是否断线或短路,检测耦合压力的变送器是否断线或短路,检测锁定油缸9位置的接近开关是否断线或短路,检测各组件正常后,则根据需要按下接杆按钮或卸杆按钮。
25.检测夹爪臂位置的夹爪臂角度传感器wan3ⅰ在接、卸杆过程中一直保持检测夹爪臂的旋转位置;检测单杆槽状态的接近开关b126ⅱ, 在接、卸杆过程中一直保持检测接近开关b126ⅱ的信号状态,检测双杆槽位置的接近开关b127ⅲ,在接、卸杆过程中一直保持检测接近开关b127ⅲ的信号状态,两者结合,判断储存钻杆的机械结构的位置是在单杆槽、双杆槽还是三杆槽;在设计机械结构和安装接近开关b126ⅱ、b127时,已计算好,当b126为真时,说明在存储钻杆的机械结构在单杆槽位置,当b127为真时,说明存储钻杆的机械结构在双杆槽位置,当b126和b127均为真时,说明存储钻杆的机械结构在三杆槽位置;检测耦合压
力的压力变送器b140,在接、卸杆过程中一直保持检测耦合器5的压力,判断耦合器5是否工作;检测锁定油缸9位置的接近开关b125ⅳ,在接、卸杆过程中一直保持检测锁定油缸9是否在拔出位置。
26.作为本发明提供的一种用于土石岩层钻进的一键自动接卸钻杆的控制方法的一种具体实施例,请参照图1至图5b,进行接钻杆操作,按下外置的接杆按钮,确定夹爪臂角度传感器wan3ⅰ是否在设定的零点位置,如果不在零点位置,则电磁阀y303aⅶ得电,伸出驻停油缸7,直到夹爪臂角度传感器wan3ⅰ到达零点位置,确定接近开关b126ⅱ和接近开关b127ⅲ的状态,结合接近开关b126ⅱ与接近开关b127ⅲ的状态,分辨此时储杆器在单杆槽、双杆槽或三杆槽的位置。
27.请参照图3,接近开关b126ⅱ信号为真,接近开关b127ⅲ信号为假,储杆器在单杆槽位置,此时执行单杆槽位置的接杆程序一,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定单杆槽,夹爪臂旋转到单杆槽处,单杆槽位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达单杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从单杆槽位置抓取一根钻杆,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从单杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3ⅰ的值判断确定;完成接杆工作,电磁阀y303bⅶ得电,夹爪臂返回到零点位置;开始钻孔操作,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y306
ⅹ
得电耦合器5加压,检测到用于检测耦合压力的压力变送器b140达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到用于检测锁定油缸9位置的接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304b
ⅷ
得电,分度油缸8缩回,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,等待下一循环取杆操作。
28.请参照图4a及图4b,接近开关b126ⅱ信号为假,接近开关b127ⅲ信号为真,储杆器在双杆槽位置,此时执行双杆槽位置的接杆程序二,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定双杆槽的位置,夹爪臂旋转到双杆槽处,双杆槽的位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达双杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从双杆槽外圈位置抓取一根钻杆,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从双杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3ⅰ的值判断确定;完成接杆工作,电磁阀y303bⅶ得电,夹爪臂返回到零点位置,从双杆槽位置外圈抓取一根钻杆,并记录抓取次数为1,完成后,开始钻孔工作,钻孔完毕后,需要接钻杆时,按下接杆按钮,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定双杆槽的位置,夹爪臂旋转到双杆槽处,双杆槽的位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达双杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从双杆槽位置里圈抓取剩余的一根钻杆,并记录抓取次数为2,说明双杆槽内已没有钻杆,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从双杆槽位置运动到凿岩机中心位置;开始钻孔操作,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y306
ⅹ
得电耦合器5加压,检测到用于检测耦合压力的压力变送器b140达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到用于检测锁定油缸9位置的接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304b
ⅷ
得电,分度油缸8缩回,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,等
待下一循环取杆操作。
29.请参照图5a及图5b,接近开关b126ⅱ信号为真,接近开关b127ⅲ信号为真,储杆器在三杆槽位置,此时执行三杆槽位置的接杆程序三,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定三杆槽的位置,夹爪臂旋转到三杆槽处,三杆槽的位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达三杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从三杆槽位置外圈抓取一根钻杆,并记录抓取次数为1,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从三杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3ⅰ的值判断确定;完成接杆工作,电磁阀y303bⅶ得电,夹爪臂返回到零点位置,完成后,开始钻孔工作,钻孔完毕后,需要接钻杆时,按下接杆按钮,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定三杆槽的位置,夹爪臂旋转到三杆槽处,三杆槽的位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达三杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从三杆槽位置中圈抓取一根钻杆,并记录抓取次数为2,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从三杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3ⅰ的值判断确定;完成接杆工作,电磁阀y303bⅶ得电,夹爪臂返回到零点位置,完成后,开始钻孔工作后,钻孔完毕后,需要接钻杆时,按下接杆按钮,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y302aⅵ、电磁阀y303aⅶ得电,通过夹爪臂角度传感器wan3ⅰ的值判断确定三杆槽的位置,夹爪臂旋转到三杆槽处,三杆槽的位置由夹爪臂角度传感器wan3ⅰ的值判断确定,到达三杆槽位置后,电磁阀y301b
ⅴ
得电,夹爪6闭合,从三杆槽位置里圈抓取一根钻杆,并记录抓取次数为3,说明三杆槽内已没有钻杆,电磁阀y302bⅵ得电,抓住钻杆的夹爪臂从单杆槽、双杆槽或三杆槽位置运动到凿岩机中心位置,凿岩机中心位置由夹爪臂角度传感器wan3ⅰ的值判断确定;完成接杆工作,电磁阀y303bⅶ得电,夹爪臂返回到零点位置,完成后,开始钻孔工作,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y306
ⅹ
得电耦合器5加压,检测到压力变送器b140达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304b
ⅷ
得电,分度油缸8缩回,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,等待下一循环取杆操作。
30.在正常工作状态下,只调用接杆程序一、接杆程序二、接杆程序三中的一个程序,就可以完成接杆工作,接杆程序执行完毕,返回到开始状态,等待下一循环的操作。
31.作为本发明提供的一种用于土石岩层钻进的一键自动接卸钻杆的控制方法的一种具体实施例,请参照图1、图2、图6至图8b,进行卸钻杆操作,按下外置的卸杆按钮后,检测夹爪臂角度传感器wan3ⅰ是否在设定的零点位置,如果不在设定的零点位置,电磁阀y303aⅶ得电,执行程序伸出驻停油缸7,直到夹爪臂角度传感器wan3ⅰ到达设定的零点位置后,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到单杆槽、双杆槽或三杆槽位置,由夹爪臂角度传感器wan3ⅰ判断单杆槽、双杆槽或三杆槽位置,把钻杆放入单杆槽、双杆槽或三杆槽,在单杆槽、双杆槽或三杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在单杆槽、双杆槽或三杆槽内。
32.请参照图6,接近开关b126ⅱ信号为真,接近开关b127ⅲ信号为假,储杆器在单杆
槽位置,此时执行单杆槽位置的卸杆程序一,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到单杆槽位置,由夹爪臂角度传感器wan3ⅰ判断单杆槽位置,把钻杆放入单杆槽,在单杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在单杆槽内,电磁阀y304b
ⅷꢀ
得电,分度油缸8收回,电磁阀y306
ⅹ
得电,耦合器5加压,压力变送器b140检测到耦合器5压力达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽内,等待下一循环卸钻杆操作。
33.请参照图7a及图7b,接近开关b126ⅱ信号为假,接近开关b127ⅲ信号为真,储杆器在双杆槽位置,此时执行双杆槽位置的卸杆程序二,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到双杆槽位置,由夹爪臂角度传感器wan3ⅰ判断双杆槽位置,夹爪臂抓住钻杆运动到双杆槽内圈位置,并记录次数为1,把钻杆放入双杆槽,在双杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在双杆槽内圈内,进行下一个钻杆的卸杆操作,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到双杆槽位置,由夹爪臂角度传感器wan3ⅰ判断双杆槽位置,夹爪臂抓住钻杆运动到双杆槽外圈位置,并记录次数为2,把钻杆放入双杆槽,在双杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在双杆槽内,电磁阀y304b
ⅷꢀ
得电,分度油缸8收回,电磁阀y306
ⅹ
得电,耦合器5加压,压力变送器b140检测到耦合器5压力达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,储杆器旋转到下一个无钻杆的单杆槽、双杆槽或三杆槽内,等待下一循环卸钻杆操作。
34.请参照图8a及图8b,接近开关b126ⅱ信号为真,接近开关b127ⅲ信号为真,储杆器在三杆槽位置,此时执行三杆槽位置的卸杆程序三,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到三杆槽位置,由夹爪臂角度传感器wan3ⅰ判断三杆槽位置,夹爪臂抓住钻杆运动到三杆槽内圈位置,并记录次数为1,把钻杆放入三杆槽,在三杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在三杆槽内,进行下一个钻杆的卸杆操作,电磁阀y301a
ⅴ
得电夹爪6打开,电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到三杆槽位置,由夹爪臂角度传感器wan3ⅰ判断三杆槽位置,夹爪臂抓住钻杆运动到三杆槽中圈位置,并记录次数为2,把钻杆放入三杆槽,在三杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在三杆槽内,进行下一个钻杆的卸杆操作,电磁阀y301a
ⅴ
得电夹爪6打开,
电磁阀y303bⅶ得电,夹爪臂旋转到凿岩机中心位置,电磁阀y301b
ⅴ
得电夹爪6闭合,夹爪臂抓住钻杆,拧松钻杆螺纹,发出完成信号,电磁阀y302bⅵ得电夹爪臂抓住钻杆运动到三杆槽位置,由夹爪臂角度传感器wan3ⅰ判断三杆槽位置,夹爪臂抓住钻杆运动到三杆槽外圈位置,并记录次数为3,把钻杆放入三杆槽,在三杆槽内表面摩擦力的作用下,夹爪6打开移走后,钻杆会卡装在三杆槽内,电磁阀y304b
ⅷꢀ
得电,分度油缸8收回,电磁阀y306
ⅹ
得电,耦合器5加压,压力变送器b140检测到耦合器5压力达到设定值后,电磁阀y305a
ⅸ
得电,锁定油缸9拔出,检测到接近开关b125ⅳ信号为真时,锁定油缸9完全拔出,电磁阀y304a
ⅷ
得电,分度油缸8伸出,延时后,电磁阀y305b
ⅸ
得电,锁定油缸9插入,此时接近开关b125ⅳ信号为假,电磁阀y306
ⅹ
断电,释放耦合压力,储杆器旋转到下一个无钻杆的三杆槽内,等待下一循环卸钻杆操作。
35.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1