一种锁接结构及具有所述锁接结构的机器人的制作方法
1.本实用新型涉及仿人机器人技术领域,尤其涉及一种锁接结构及具有所述锁接结构的机器人。
背景技术:
2.现有的仿人机器人形体与真人大小一般,仿人机器人整体结构一般采用螺丝连接,机构连接复杂,更换、维修内部器件较为困难,较大的体积也使机器人在拆装、运输时存在一定难度。
技术实现要素:
3.为了克服上述现有技术的缺陷,本实用新型所要解决的技术问题是提供一种便于拆装的锁接结构及具有所述锁接结构的机器人。
4.为了解决上述技术问题,本实用新型采用的技术方案为:一种锁接结构,包括第一主体、第二主体以及用于将第一主体和第二主体相互锁定的弹性锁具;
5.所述弹性锁具的一端与所述第一主体固定连接,所述弹性锁具的另一端与所述第二主体可拆卸连接,所述弹性锁具处于拉伸或压缩状态,所述第二主体受到两组以上所述弹性锁具的弹力的合力为零。
6.在可选实施例中,所述弹性锁具包括锁件和弹性件,所述锁件上设有与所述第二主体卡接的锁扣,所述锁件通过弹性件与所述第一主体固定连接,所述弹性件处于拉伸或压缩状态,所述第二主体受到两个以上所述锁件的作用力的合力为零。
7.在可选实施例中,所述第一主体设有通孔,所述第二主体在对应所述第一主体的通孔处设有卡接口,当所述锁扣穿过通孔与所述卡接口卡接时,所述锁扣与通孔的内壁间具有间隙。
8.在可选实施例中,所述锁件包括按压部和锁紧部,所述按压部位于第一主体的一侧,所述按压部通过弹性件与所述第一主体固定连接,所述锁紧部的一端与按压部连接,所述锁扣设置于锁紧部的另一端,所述第二主体位于第一主体的相对于所述第一主体的一侧的另一侧。
9.在可选实施例中,所述锁件上设有定位柱,所述固定座上设有与所述定位柱插接配合的定位孔。
10.在可选实施例中,所述固定座上设有与所述第一主体锁接的锁孔。
11.在可选实施例中,所述锁扣的截面形状为j形。
12.在可选实施例中,所述弹性件为弹簧。
13.在可选实施例中,所述弹性锁具还包括固定座,所述弹性件通过固定座与所述第一主体固定连接。
14.本实用新型还提供一种机器人,所述第一主体为机器人上身组件,所述第二主体为机器人下身组件。
15.本实用新型的有益效果在于:提供一种锁接结构,第一主体和第二主体之间通过两组以上的弹性锁具相互锁定,每组弹性锁具自身均具有弹性,各自分别与第一主体和第二主体连接,每组弹性均处于压缩或拉伸状态,当第二主体受到两组以上弹性锁具的弹力合力等于零时,第二主体即相对于第一主体锁定。本实用新型还提供一种采用上述锁接结构的机器人,该机器人的机器人上身组件即为第一主体,该机器人的机器人下身组件即为第二主体,二者利用弹性锁具可拆卸连接,从而利于机器人整体的拆装、更换、运输等作业。
附图说明
16.图1所示为本实用新型实施例的锁接结构的剖视图;
17.图2所示为本实用新型实施例的锁接结构的主视图;
18.图3所示为本实用新型实施例的锁接结构的俯视图;
19.图4所示为本实用新型实施例的弹性锁具的结构示意图;
20.图5所示为本实用新型实施例的弹性锁具的主视图;
21.图6所示为本实用新型实施例的弹性锁具的俯视图;
22.图7所示为本实用新型实施例的弹性锁具的侧视图;
23.图8所示为本实用新型实施例的锁件的结构示意图;
24.图9所示为本实用新型实施例的锁件的主视图;
25.图10所示为本实用新型实施例的锁件的俯视图;
26.图11所示为本实用新型实施例的锁件的侧视图;
27.图12所示为本实用新型实施例的固定座的结构示意图;
28.图13所示为本实用新型实施例的固定座的主视图;
29.图14所示为本实用新型实施例的固定座的俯视图;
30.图15所示为本实用新型实施例的固定座的侧视图;
31.图16所示为本实用新型实施例的机器人的主视图;
32.图17所示为本实用新型实施例的机器人的侧视图;
33.图18所示为本实用新型实施例的机器人的局部示意图;
34.图19所示为本实用新型实施例的机器人的另一局部示意图;
35.图20所示为本实用新型实施例的机器人的另一局部示意图;
36.标号说明:
37.1、第一主体;11、通孔;
38.2、第二主体;21、卡接口;
39.3、弹性锁具;31、锁件;311、锁扣;312、按压部;313、锁紧部;314、定位柱;32、弹性件;33、固定座;331、定位孔;332、锁孔;
40.4、第一安装板;
41.5、第二安装板。
具体实施方式
42.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
43.请参照图1至图20所示,本实用新型的一种锁接结构,包括第一主体、第二主体以及用于将第一主体和第二主体相互锁定的弹性锁具;
44.所述弹性锁具的一端与所述第一主体固定连接,所述弹性锁具的另一端与所述第二主体可拆卸连接,所述弹性锁具处于拉伸或压缩状态,所述第二主体受到两组以上所述弹性锁具的弹力的合力为零。
45.从上述描述可知,本实用新型的有益效果在于:提供一种锁接结构,第一主体和第二主体之间通过两组以上的弹性锁具相互锁定,每组弹性锁具自身均具有弹性,各自分别与第一主体和第二主体连接,每组弹性均处于压缩或拉伸状态,当第二主体受到两组以上弹性锁具的弹力合力等于零时,第二主体即相对于第一主体锁定。
46.进一步的,所述弹性锁具包括锁件和弹性件,所述锁件上设有与所述第二主体卡接的锁扣,所述锁件通过弹性件与所述第一主体固定连接,所述弹性件处于拉伸或压缩状态,所述第二主体受到两个以上所述锁件的作用力的合力为零。
47.从上述描述可知,弹性锁具的锁件通过弹性件与第一主体固定连接,锁件的锁扣与第二主体可拆卸的卡接,结构简单、使用便捷。
48.进一步的,所述第一主体设有通孔,所述第二主体在对应所述第一主体的通孔处设有卡接口,当所述锁扣穿过通孔与所述卡接口卡接时,所述锁扣与通孔的内壁间具有间隙。
49.从上述描述可知,第一主体上设有通孔,以供锁扣穿过,锁扣穿过后与第二主体的卡接口卡接,从而使第二主体相对第一主体上锁定,上述间隙的作用是为了保证锁接的有效性,当锁扣与卡接口拆卸后,锁扣可以抵靠在通孔的内壁上以防止锁具脱落。
50.进一步的,所述锁件包括按压部和锁紧部,所述按压部位于第一主体的一侧,所述按压部通过弹性件与所述第一主体固定连接,所述锁紧部的一端与按压部连接,所述锁扣设置于锁紧部的另一端,所述第二主体位于第一主体的相对于所述第一主体的一侧的另一侧。
51.从上述描述可知,按压部方便使用者向与弹簧拉伸或压缩相反的方向按压,以实现锁扣与第二主体的拆卸。
52.进一步的,所述锁件上设有定位柱,所述固定座上设有与所述定位柱插接配合的定位孔。
53.从上述描述可知,定位柱和定位孔起到导向以及增加结构强度的作用。
54.进一步的,所述固定座上设有与所述第一主体锁接的锁孔。
55.从上述描述可知,利用紧固件与锁孔的配合可方便固定座与第一主体拆装。
56.进一步的,所述锁扣的截面形状为j形。
57.从上述描述可知,j形结构可同时在两个以上方向上对第二主体进行限位,使得第一主体和第二主体相对结构更加稳定。
58.进一步的,所述弹性件为弹簧。
59.从上述描述可知,弹性件为弹簧,有利于降低制造及维保成本。
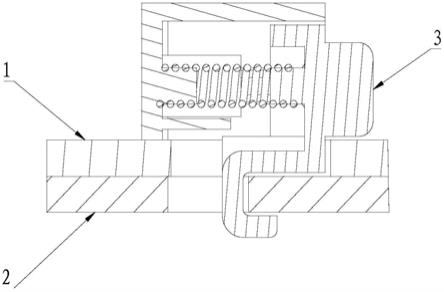
60.进一步的,所述弹性锁具还包括固定座,所述弹性件通过固定座与所述第一主体固定连接。
61.从上述描述可知,固定座起到安装连接的作用,符合锁接结构的可拆形式。
62.本实用新型还提供一种机器人,所述第一主体为机器人上身组件,所述第二主体为机器人下身组件。
63.从上述描述可知,本实用新型的有益效果在于:提供一种采用上述锁接结构的机器人,该机器人的机器人上身组件即为第一主体,该机器人的机器人下身组件即为第二主体,二者利用弹性锁具可拆卸连接,从而利于机器人整体的拆装、更换、运输等作业。
64.本实用新型的实施例一为:请参照图1~3所示,一种锁接结构,包括第一主体1、第二主体2以及用于将第一主体1和第二主体2相互锁定的弹性锁具3;
65.所述弹性锁具3的一端与所述第一主体1固定连接,所述弹性锁具3的另一端与所述第二主体2可拆卸连接,所述弹性锁具3处于压缩状态,所述第二主体2受到两组以上所述弹性锁具3的弹力的合力为零。
66.请参照图4~7所示,所述弹性锁具3包括锁件31和弹性件32,所述锁件31上设有与所述第二主体2卡接的锁扣311,所述锁件31通过弹性件32与所述第一主体1固定连接,所述弹性件32处于压缩状态,所述第二主体2受到两个以上所述锁件31的作用力的合力为零。所述第一主体1设有通孔11,所述第二主体2在对应所述第一主体1的通孔11处设有卡接口21,当所述锁扣311穿过通孔11与所述卡接口21卡接时,所述锁扣311与通孔11的内壁间具有间隙。请参照图8~11所示,所述锁件31包括按压部312和锁紧部313,所述按压部312位于第一主体1的一侧,所述按压部312通过弹性件32与所述第一主体1固定连接,所述锁紧部313的一端与按压部312连接,所述锁扣311设置于锁紧部313的另一端,所述第二主体2位于第一主体1的相对于所述第一主体1的一侧的另一侧。所述锁扣311的截面形状为j形。所述弹性件32为弹簧。请参照图12~15所示,所述弹性锁具3还包括固定座33,所述弹性件32通过固定座33与所述第一主体1固定连接。所述锁件31上设有定位柱314,所述固定座33上设有与所述定位柱314插接配合的定位孔331。所述固定座33上设有与所述第一主体1锁接的锁孔332。
67.本实用新型的实施例二与实施例一的区别在于:在本实施例中,弹性件32处于拉伸状态,所述锁扣311与所述卡接口21卡接的位置与实施例一中相反。
68.请参照图16至图20所示,本实用新型的实施例二为:一种具有实施例一所述的锁接结构的机器人,所述第一主体1为机器人上身组件,所述第二主体2为机器人下身组件,机器人上身组件的底部设有第一安装板4,机器人下身组件的底部设有第二安装板5,所述第一安装板4和第二安装板5通过两组以上所述弹性锁具3可拆卸连接。本实施例的机器人的安装过程如下:将锁件31通过弹性件32与固定座33连接,按压锁件31的按压部312使锁扣311穿过第一安装板4的通孔11,将固定座33与第一安装板4锁接,然后将第一安装板4的通孔11与第二安装板5的卡接口21对准,按压按压部312使得锁扣311与卡接口21卡接,从而完成机器人上身组件与机器人下身组件的锁定。
69.综上所述,本实用新型提供一种锁接结构,第一主体和第二主体之间通过两组以上的弹性锁具相互锁定,每组弹性锁具自身均具有弹性,各自分别与第一主体和第二主体连接,每组弹性均处于压缩或拉伸状态,当第二主体受到两组以上弹性锁具的弹力合力等于零时,第二主体即相对于第一主体锁定。弹性锁具的锁件通过弹性件与第一主体固定连接,锁件的锁扣与第二主体可拆卸的卡接,结构简单、使用便捷。第一主体上设有通孔,以供锁扣穿过,锁扣穿过后与第二主体的卡接口卡接,从而使第二主体相对第一主体上锁定,上
述间隙的作用是为了保证锁接的有效性,当锁扣与卡接口拆卸后,锁扣可以抵靠在通孔的内壁上以防止锁具脱落。按压部方便使用者向与弹簧拉伸或压缩相反的方向按压,以实现锁扣与第二主体的拆卸。j形结构可同时在两个以上方向上对第二主体进行限位,使得第一主体和第二主体相对结构更加稳定。弹性件为弹簧,有利于降低制造及维保成本。固定座起到安装连接的作用,符合锁接结构的可拆形式。定位柱和定位孔起到导向以及增加结构强度的作用。利用紧固件与锁孔的配合可方便固定座与第一主体拆装。本实用新型还提供一种采用上述锁接结构的机器人,该机器人的机器人上身组件即为第一主体,该机器人的机器人下身组件即为第二主体,二者利用弹性锁具可拆卸连接,从而利于机器人整体的拆装、更换、运输等作业。
70.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1