一种PWM驱动负载的故障诊断方法、装置和驱动系统与流程
一种pwm驱动负载的故障诊断方法、装置和驱动系统
技术领域
[0001]
本发明实施例涉及负载故障检测技术领域,尤其涉及一种pwm驱动负载的故障诊断方法、装置和驱动系统。
背景技术:
[0002]
目前发动机上有多种驱动类型的负载,通过发动机ecu进行自动控制。随着整车工况越来越复杂和整车线束越来越多,对发动机负载故障的检测也越来越严格。
[0003]
针对pwm驱动负载,其周期和占空比是实时变化的,当在低频控制时,由于脉冲的高低电平变化导致发生故障时,诊断结果一直跳变,难以进行有效的检测和故障报出处理。现有技术中一种方案是对诊断结果进行锁存,即诊断到故障发生时保存故障字信息不再更新,防止pwm驱动负载的诊断结果跳变,但是容易导致误报故障时直接切断输出,不能恢复正常驱动,导致故障不能治愈。
技术实现要素:
[0004]
本发明实施例提供了一种pwm驱动负载的故障诊断方法、装置和驱动系统,以简单有效的解决pwm驱动负载在低频率时的诊断跳变的问题,实现pwm类型驱动负载故障的稳定报出,以及在误报故障时恢复对pwm驱动负载的正常驱动。
[0005]
第一方面,本发明实施例提供了一种pwm驱动负载的故障诊断方法,包括:
[0006]
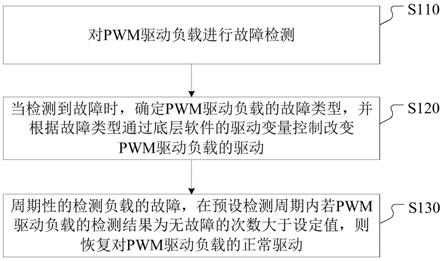
对pwm驱动负载进行故障检测;
[0007]
当检测到故障时,确定所述pwm驱动负载的故障类型,并根据所述故障类型通过底层软件的驱动变量控制改变所述pwm驱动负载的驱动;
[0008]
周期性的检测所述负载的故障,在预设检测周期内若所述pwm驱动负载的检测结果为无故障的次数大于设定值,则
[0009]
恢复对所述pwm驱动负载的正常驱动。
[0010]
可选的,所述对pwm驱动负载进行故障检测,包括:
[0011]
检测与所述pwm驱动负载连接的驱动针脚的电平信号;
[0012]
根据所述电平信号判断所述pwm驱动负载的所述故障类型。
[0013]
可选的,所述故障类型包括对电源短路故障、对地短路故障和开路故障;所述pwm驱动负载驱动方式包括高边驱动或低边驱动;
[0014]
若所述pwm驱动负载为低边驱动,则在驱动信号为低电平时驱动所述pwm驱动负载;并在驱动信号为低电平时检测是否出现所述对电源短路故障,在驱动信号为高电平时检测是否出现所述对地短路故障或所述开路故障;
[0015]
若所述pwm驱动负载为高边驱动,则在驱动信号为高电平时驱动所述pwm驱动负载;并在驱动信号为高电平时检测是否出现对地短路故障或所述开路故障,在驱动信号为低电平时检测是否出现所述对电源短路故障。
[0016]
可选的,当检测到对地短路故障或开路故障时,所述根据所述故障类型通过底层
软件的驱动变量bswdrive_raw控制改变所述pwm驱动负载的驱动,包括:
[0017]
通过底层软件的驱动变量bswdrive_raw将pwm占空比设为0,以改变所述pwm驱动负载的驱动;
[0018]
可选的,当检测到对电源短路故障时,所述根据所述故障类型通过底层软件的驱动变量bswdrive_raw控制改变所述pwm驱动负载的驱动,包括:
[0019]
通过底层软件的驱动变量bswdrive_raw将pwm占空比设为100%,以改变所述pwm驱动负载的驱动。
[0020]
可选的,所述恢复对所述pwm驱动负载的正常驱动,包括:
[0021]
根据应用层软件的驱动变量aswdrive_raw对所述pwm驱动负载进行驱动控制。
[0022]
可选的,所述根据应用层软件的驱动变量aswdrive_raw对所述pwm驱动负载进行驱动控制,包括:
[0023]
将所述应用层软件的驱动变量aswdrive_raw对所述底层软件的驱动变量bswdrive_raw进行赋值;
[0024]
通过赋值后的底层软件的驱动变量驱动变量bswdrive_raw对所述pwm驱动负载进行驱动控制。
[0025]
可选的,所述对pwm驱动负载进行故障检测之后,还包括:
[0026]
当检测到无故障时,周期性的检测所述负载的故障,并在预设检测周期内所述pwm驱动负载的检测结果为无故障的次数大于设定值时,根据应用层软件的驱动变量aswdrive_raw对所述pwm驱动负载进行驱动控制。
[0027]
第二方面,本发明实施例提供了一种pwm驱动负载的故障诊断装置,包括:
[0028]
故障检测和驱动模块,用于对pwm驱动负载进行故障检测;当检测到故障时,确定所述pwm驱动负载的故障类型,
[0029]
处理模块,用于根据所述故障类型通过底层软件的驱动变量bswdrive_raw控制改变所述pwm驱动负载的驱动;
[0030]
所述故障检测和驱动模块周期性的检测所述负载的故障,所述处理模块还用于在预设检测周期内若所述pwm驱动负载的检测结果为无故障的次数大于设定值时,恢复对所述pwm驱动负载的正常驱动。
[0031]
第三方面,本发明实施例提供了一种pwm驱动负载的驱动系统,包括电源信号输出模块,还包块第二方面所述的故障诊断装置,所述电源信号输出模块与所述pwm驱动负载的第一端连接,所述pwm驱动负载的第二端通过驱动针脚与所述故障诊断装置连接;
[0032]
所述故障检测和驱动模块包括驱动芯片,所述处理模块包括单片机,所述单片机集成有底层软件和应用层软件。
[0033]
本发明实施例提供了一种pwm驱动负载的故障诊断方法、装置和驱动系统,方法包括:对pwm驱动负载进行故障检测;当检测到故障时,确定pwm驱动负载的故障类型,并根据故障类型通过底层软件的驱动变量控制改变pwm驱动负载的驱动;周期性的检测负载的故障,在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值,则恢复对pwm驱动负载的正常驱动。本发明实施例提供的技术方案在检测到pwm驱动负载的故障后,通过底层软件的驱动变量控制改变pwm驱动负载的驱动,并在后续的周期性的检测负载的故障中,在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值时,恢复
对pwm驱动负载的正常驱动。通过软件控制pwm驱动底层的驱动状态,不需修改硬件电路,简单有效的解决了pwm驱动负载存在诊断跳变的问题,实现了pwm类型驱动负载故障的稳定报出,以及在误报故障时恢复对pwm驱动负载的正常驱动。
附图说明
[0034]
图1是本发明实施例一提供的一种pwm驱动负载的故障诊断方法的流程图;
[0035]
图2是本发明实施例一提供的另一种pwm驱动负载的故障诊断方法的流程图;
[0036]
图3是本发明实施例一提供的另一种pwm驱动负载的故障诊断方法的流程图;
[0037]
图4是本发明实施例二提供的一种pwm驱动负载的故障诊断装置的结构框图;
[0038]
图5是本发明实施例三提供的一种pwm驱动负载的驱动系统的结构框图。
具体实施方式
[0039]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0040]
本发明实施例提供了一种pwm驱动负载的故障诊断方法,图1是本发明实施例一提供的一种pwm驱动负载的故障诊断方法的流程图,参考图1,方法包括:
[0041]
s110、对pwm驱动负载进行故障检测。
[0042]
具体的,pwm(pulse width modulation,脉冲宽度调制)是一种模拟控制方式,pwm驱动负载即为通过输出的脉冲信号作为驱动信号进行工作的负载。pwm驱动负载的驱动系统可以包括电源信号输出模块和故障诊断装置,电源信号输出模块与pwm驱动负载的第一端连接。pwm驱动负载的第二端通过驱动针脚与故障诊断装置连接。电源信号输出模块为pwm驱动负载提供电源信号,故障诊断装置可以在pwm驱动负载正常工作时提供驱动信号以及周期性的检测pwm驱动负载的故障。pwm驱动负载未发生故障时,电源信号输出模块为pwm驱动负载提供的电源信号的电压值与故障诊断装置为pwm驱动负载提供的驱动信号的电压值的差值达到pwm驱动负载的工作电压时,驱动pwm驱动负载工作。故障诊断装置可以为一种控制器,包括单片机和外围的驱动电路。驱动电路中包括驱动芯片。单片机集成有底层软件和应用层软件。驱动芯片可以对pwm驱动负载进行故障检测,还可以发出驱动信号控制pwm驱动负载的工作状态。驱动芯片向pwm驱动负载输出的驱动信号的高低电平由单片机控制。
[0043]
pwm驱动负载可以为低边驱动也可以为高边驱动。低边驱动是指,控制器发出的驱动信号为低电平时,而电源信号输出模块提供的为高电平,pwm驱动负载的两端形成的电压差足以驱动pwm驱动负载,从而驱动pwm驱动负载工作。例如,电源信号输出模块提供24v电压,控制器输出的驱动信号为0v,pwm驱动负载工作。电源信号输出模块提供24v电压,控制器输出的驱动信号为24v,pwm驱动负载不工作。同理,高边驱动是指,在pwm驱动负载未发生故障时,控制器发出的驱动信号为高电平,可以驱动pwm驱动负载工作。这里不再赘述。
[0044]
s120、当检测到故障时,确定pwm驱动负载的故障类型,并根据故障类型通过底层软件的驱动变量控制改变pwm驱动负载的驱动。
[0045]
具体的,对pwm驱动负载进行故障检测,在未发生故障时,pwm驱动负载的驱动控制
接收应用层软件的驱动变量进行正常的驱动。当检测到故障时,控制器根据故障类型通过底层软件的驱动变量控制改变pwm驱动负载的驱动。
[0046]
s130、周期性的检测负载的故障,在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值,则恢复对pwm驱动负载的正常驱动。
[0047]
具体的,周期性的检测驱动负载的故障,如果下一个步长未检测到故障,则认为本步长无故障,如果无故障次数大于设定值max,则进行故障治愈,恢复对pwm驱动负载的正常驱动。诊断结果确认为无故障,继续接收来自应用层的驱动变量aswdrive_raw的驱动。可选的,恢复对pwm驱动负载的正常驱动可以通过继续根据应用层软件的驱动变量aswdrive_raw对pwm驱动负载进行驱动控制实现。
[0048]
本发明实施例提供了一种pwm驱动负载的故障诊断方法,在检测到pwm驱动负载的故障后,通过底层软件的驱动变量控制改变pwm驱动负载的驱动,并在后续的周期性的检测负载的故障中,在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值时,恢复对pwm驱动负载的正常驱动。通过软件控制pwm驱动底层的驱动状态,不需修改硬件电路,简单有效的解决了pwm驱动负载存在诊断跳变的问题,实现了pwm类型驱动负载故障的稳定报出,以及在误报故障时恢复对pwm驱动负载的正常驱动。
[0049]
图2是本发明实施例一提供的另一种pwm驱动负载的故障诊断方法的流程图,参考图2,方法包括:
[0050]
s210、检测与pwm驱动负载连接的驱动针脚的电平信号。
[0051]
具体的,对pwm驱动负载进行故障检测可以通过检测与pwm驱动负载连接的驱动针脚的电平信号确定。控制器设置有驱动针脚,pwm驱动负载通过驱动针脚与控制器连接。控制器包括单片机和外围的驱动电路。驱动电路中包括驱动芯片。对pwm驱动负载进行故障检测时,驱动针脚上的电信号即为pwm驱动负载输出的电信号。
[0052]
s220、根据电平信号判断pwm驱动负载的故障类型。
[0053]
具体的,pwm驱动负载故障类型可以包括对电源短路故障、对地短路故障和开路故障。例如pwm驱动负载发生开路故障时,驱动针脚上的电信号变为零不动。pwm驱动负载发生对电源短路故障时,驱动针脚上的电信号变为高电平不动。pwm驱动负载发生对地短路故障时,驱动针脚上的电信号即为接地的电信号不动。将驱动针脚上的电信号传输给驱动芯片,驱动芯片通过逻辑判断确定pwm驱动负载的故障类型,并将代表故障类型的故障字通过串行外设接口(serial peripheral interface,spi)通信反馈给单片机,从而实现根据电平信号确定pwm驱动负载的故障类型。例如,反馈的故障字为“4”代表pwm驱动负载发生开路故障,反馈的故障字为“2”代表pwm驱动负载发生对地短路故障,反馈的故障字为“1”代表pwm驱动负载发生对电源短路故障,反馈的故障字为“0”代表pwm驱动负载未发生故障。
[0054]
需要说明的是,若pwm驱动负载为低边驱动,则在驱动信号为低电平时驱动pwm驱动负载;并在驱动信号为低电平时检测是否出现对电源短路故障,在驱动信号为高电平时检测是否出现对地短路故障或所述开路故障;若pwm驱动负载为高边驱动,则在驱动信号为高电平时驱动pwm驱动负载;并在驱动信号为高电平时检测是否出现对地短路故障或开路故障,在驱动信号为低电平时检测是否出现对电源短路故障。
[0055]
若pwm驱动负载为低边驱动,即电源信号输出模块为pwm驱动负载提供的电源信号为高电平,例如高电平为24v电压。控制器通过驱动针脚为pwm驱动负载的另一端提供的驱
动信号为低电平,例如为0v电压时,pwm驱动负载驱动,控制器通过驱动针脚为pwm驱动负载的另一端提供的驱动信号为高电平,例如为24v电压时,pwm驱动负载不驱动。在驱动信号为高电平时检测是否出现对地短路故障或所述开路故障,即此时不驱动pwm驱动负载,控制器通过驱动针脚为pwm驱动负载的另一端提供的驱动信号为高电平,若此时驱动针脚上的电位降低为低电平,与驱动信号的高电平不同,则说明pwm驱动负载出现对地短路故障或所述开路故障。在驱动信号为低电平时检测是否出现对电源短路故障,在驱动信号为低电平时,即驱动pwm驱动负载时,控制器通过驱动针脚为pwm驱动负载的另一端提供的驱动信号为低电平。若pwm驱动负载出现对电源短路故障,则驱动针脚上的电位会降低为高电平,与驱动信号的低电平不同,因此可以确定发生对对电源短路故障。
[0056]
同理,若pwm驱动负载为高边驱动,即此时pwm驱动负载的第一端输入的电源信号为低电平,例如低电平为0v电压,控制器为pwm驱动负载提供的驱动信号为高电平,例如高电平为24v电压,pwm驱动负载工作。在驱动信号为高电平时检测是否出现对地短路故障或所述开路故障,在驱动信号为高电平时,即驱动pwm驱动负载时,控制器通过驱动针脚为pwm驱动负载的另一端提供的驱动信号为高电平。若pwm驱动负载出现对地短路故障或所述开路故障,则驱动针脚上的电位会降低为低电平,与驱动信号的高电平不同,因此可以确定发生对地短路故障或开路故障。在驱动信号为低电平时检测是否出现对电源短路故障,在驱动信号为低电平时,即不驱动pwm驱动负载时,控制器通过驱动针脚为pwm驱动负载的另一端提供的驱动信号为低电平。若pwm驱动负载出现对电源短路故障,则驱动针脚上的电位会降低为高电平,与驱动信号的低电平不同,因此可以确定发生对电源短路故障。
[0057]
s230、当检测到对地短路故障或开路故障时,通过底层软件的驱动变量bswdrive_raw将pwm占空比设为0,以改变pwm驱动负载的驱动;当检测到对电源短路故障时,通过底层软件的驱动变量bswdrive_raw将pwm占空比设为100%,以改变pwm驱动负载的驱动。
[0058]
具体的,以低边驱动为例,pwm占空比为控制器发出的方波信号中高电平时间跟周期的比例,例如1秒高电平1秒低电平的pwm波占空比是50%。pwm占空比设为0,即输出的驱动信号均为低电平信号。pwm占空比设为100%,即输出的驱动信号均为高电平信号。当检测到对地短路故障或开路故障时,底层软件不再接收应用层软件的赋值,执行底层的控制逻辑,通过底层软件的驱动变量bswdrive_raw将pwm占空比设为0,改变pwm驱动负载的驱动。当检测到对电源短路故障时,通过底层软件的驱动变量bswdrive_raw将pwm占空比设为100%,以改变pwm驱动负载的驱动。
[0059]
s240、周期性的检测负载的故障,在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值,将应用层软件的驱动变量aswdrive_raw对底层软件的驱动变量bswdrive_raw进行赋值;通过赋值后的底层软件的驱动变量驱动变量bswdrive_raw对pwm驱动负载进行驱动控制。
[0060]
具体的,周期性的检测驱动负载的故障,如果下一个步长未检测到故障,则认为本步长无故障,如果无故障次数大于设定值max,则进行故障治愈,恢复对pwm驱动负载的正常驱动。诊断结果确认为无故障,继续接收来自应用层的驱动变量aswdrive_raw的驱动。将应用层软件的驱动变量aswdrive_raw对底层软件的驱动变量bswdrive_raw进行赋值;通过赋值后的底层软件的驱动变量驱动变量bswdrive_raw对pwm驱动负载进行驱动控制。实现了在误报故障时恢复对pwm驱动负载的正常驱动。
[0061]
可选的,对pwm驱动负载进行故障检测之后,还包括:
[0062]
当检测到无故障时,周期性的检测所述负载的故障,并在预设检测周期内所述pwm驱动负载的检测结果为无故障的次数大于设定值时,根据应用层软件的驱动变量aswdrive_raw对所述pwm驱动负载进行驱动控制。
[0063]
图3是本发明实施例一提供的另一种pwm驱动负载的故障诊断方法的流程图,参考图3,方法包括:
[0064]
s310、通过驱动针脚进行故障检测。
[0065]
s320、判断故障类型是否为对地短路故障或开路故障;若是,则执行步骤s340,若不是则执行步骤s360。
[0066]
s330、判断故障类型是否为对电源短路故障;若是,则执行步骤,若不是则执行步骤;
[0067]
s340、将通道的底层驱动bswdrive_raw占空比设为0%;返回执行步骤s310。
[0068]
s350将通道的底层驱动bswdrive_raw占空比设为100%;返回执行步骤s310。
[0069]
s360、判断检测到的对地短路故障或开路故障的故障次数是否大于设定值;若大于则执行步骤s380,若不大于则执行步骤s340。
[0070]
s370、判断检测到的对电源短路故障的故障次数是否大于设定值;若大于则执行步骤s380,若不大于则执行步骤s350。
[0071]
s380、正常接收应用层软件的驱动变量aswdrive_raw的驱动控制。
[0072]
示例性的,以低边驱动为例,在驱动信号的电平为高时检测对地短路故障或开路故障,在驱动信号的电平为低时检测对电源短路故障。通过周期性检测驱动负载的故障,若在预设检测周期内所述pwm驱动负载的检测结果为无故障的次数大于设定值,则根据应用层软件的驱动变量aswdrive_raw对所述pwm驱动负载进行正常的驱动控制。当检测到对地短路故障或开路故障时,通过底层驱动变量bswdrive_raw将pwm占空比设为0,从而切断负载驱动,下一个步长如果检测到scg或ol故障,则诊断结果确认为对地短路故障或开路故障,同时底层驱动变量bswdrive_raw占空比继续为0;如果下一个步长未检测到对地短路故障或开路故障,则认为本步长无故障,如果无故障次数大于设定值max,则进行故障治愈,诊断结果确认为无故障,继续接收来自应用层的驱动变量aswdrive_raw的驱动。当检测到对电源短路故障时,通过底层驱动变量bswdrive_raw将pwm占空比设为100%,下一个步长如果检测到scb故障,则诊断结果确认为对电源短路故障;如果下一个步长未检测到scb故障,则本步长认为是无故障,如果无故障次数大于设定值max,则进行故障治愈,诊断结果确认为无故障,继续接收来自应用层的驱动变量aswdrive_raw的驱动。该策略是当检测到原始故障时,将pwm驱动更改为全驱和不驱两种状态,避免因高低电平变化导致的诊断结果跳变,同时当故障消失时,对原始故障进行滤波,当无故障次数大于设定值max时,继续响应来自应用层的驱动控制。
[0073]
本发明实施例还提供了一种pwm驱动负载的故障诊断装置,用于执行上述实施例任意所述的pwm驱动负载的故障诊断方法,图4是本发明实施例二提供的一种pwm驱动负载的故障诊断装置的结构框图,参考图4,装置包括:
[0074]
故障检测和驱动模块10,用于对pwm驱动负载进行故障检测;当检测到故障时,确定所述pwm驱动负载的故障类型,
[0075]
处理模块20,用于根据所述故障类型通过底层软件的驱动变量控制改变所述pwm驱动负载的驱动;
[0076]
故障检测和驱动模块10周期性的检测所述负载的故障,处理模块20还用于在预设检测周期内若pwm驱动负载的检测结果为无故障的次数大于设定值时,恢复对pwm驱动负载的正常驱动。
[0077]
具体的,故障诊断装置100可以为一种控制器,故障检测和驱动模块10为控制器内部的外围驱动电路中的驱动芯片。处理模块20为控制器内部设置的单片机。单片机集成有底层软件和应用层软件。驱动芯片可以对pwm驱动负载进行故障检测,还可以在单片机的控制下发出驱动信号以控制pwm驱动负载的工作状态。当检测到故障时,根据pwm驱动负载的类型以及故障类型,底层软件进行不同的逻辑操作,通过底层软件的驱动变量控制pwm的占空比大小,切断负载的驱动,实现pwm类型驱动负载故障的稳定报出。解决了pwm类型驱动在低频率时的诊断跳变的问题。并在误报故障时进行故障治愈,继续接收应用层软件的驱动变量的驱动控制,恢复了对pwm驱动负载的正常驱动。
[0078]
本发明实施例还提供了一种pwm驱动负载的驱动系统,图5是本发明实施例三提供的一种pwm驱动负载的驱动系统的结构框图,参考图5,包括电源信号输出模块300,还包块上述任意实施例所述的故障诊断装置100,电源信号输出模块300与pwm驱动负载200的第一端连接,pwm驱动负载200的第二端通过驱动针脚a与故障诊断装置100连接;故障检测和驱动模块10包括驱动芯片,处理模块20包括单片机,单片机集成有底层软件和应用层软件。
[0079]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1