一种试验台的制作方法
[0001]
本发明涉及震动器测试领域,尤其是一种专门用于测试减震器阻力特性的试验台。
背景技术:
[0002]
具有微米级和纳米级磁性粒子的磁性功能流体的减震器,其可以通过控制施加到磁性功能流体的磁场的强度来控制减震阻力,从而控制减震器的减震效果。磁性功能流体中不同尺寸结构的磁性颗粒的混合比是磁性功能流体中磁性粒子团簇的大小、磁性粒子之间的内聚力以及磁性粒子受磁场强度产生磁场力的大小的主要影响因素。因此,磁性功能流体中微米级磁性粒子与纳米级磁性粒子的混合比对减震器的减震阻力特性有着重要影响。工业上为了研究磁性功能流体中微米级磁性粒子与纳米级磁性粒子的混合比、电磁场强度、加载载荷的大小对减震器的减震阻力特性的影响需要对减震器的减震阻力特性进行测试的试验台,而现有的这类试验台存在以下技术问题:
[0003]
1、现有的震动器试验台对于位移变化的检测手段难以实现微小位移变化量的动态精确测试捕捉和信号搜集传输,对于信号的分析智能化不足,无法保证测试结果的准确性和可信度。
[0004]
2、现有的震动器试验台,其对震动器加载的载荷控制不够精确高效,加载载荷难以保持稳定,无法保证测试结果的准确性和可信度。
[0005]
3、实现对包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性进行测试的试验台,对精确度、灵敏度和抗干扰性要求较高,需要专门设计这种试验台。
技术实现要素:
[0006]
为了解决上述技术问题本发明采用的技术方案如下:
[0007]
一种试验台,所述试验台用专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性,所述阻力特性是指减震器的磁性功能流体中微米级和纳米级磁性粒子的不同混合比、电磁场强度、加载载荷的大小对减震器减震阻力的影响,微米级和纳米级磁性粒子的混合比是指流体介质中微米级粒子和纳米级磁性粒子体积百分比的比值。所述试验台包括气动加载模块、被测减震器模块和阻力特性检测模块;
[0008]
所述气动加载模块的高压气源的主气路连接开关阀,所述开关阀的出气口分别连接先导式调压阀和进气阀的进气口,所述进气阀的出气口分别所述连接先导式调压阀先导腔的旁通气路和排气阀的进气口,所述连接先导式调压阀的出气管路上连接有气压传感器,所述气压传感器连接到控制机构,所述进气阀、排气阀均为二位二通电磁控制高速开关阀,所述进气阀、排气阀均连接到控制机构,所述控制机构连接到电源和工控机,所述出气管路连接到压力气体腔;
[0009]
所述压力气体腔经电磁开关阀连接到加载气缸,所述加载气缸内设置有加载活塞,该加载活塞固定在活塞杆一端;
[0010]
所述被测减震器模块的所述活塞杆中部固定有减震活塞,所述活塞杆另一端垂直固定有位移检测杆,减震缸的一端缸头固定有缸头支架,所述位移检测杆在所述缸头支架限定的空间里在减震缸轴向方向上移动;所述减震活塞设置在减震缸内并与减震缸内腔壁面保持有间隙,所述减震缸的内腔充满磁性功能流体,所述磁性功能流体为含有微米级和纳米级磁性粒子的混合液,所述减震缸的缸体外部设有电磁线圈,所述电磁线圈连接直流电源;
[0011]
所述阻力特性检测模块具有激光位移传感器,所述激光位移传感器检测位移检测杆的位移变化,并将检测信号经信号放大器传输到示波器;在所述缸头支架的顶部台面设置有力传感器,所述力传感器经应变放大器连接到所述示波器。
[0012]
所述实验台还包括试验台架,所述试验台架的台架支架下部固定在所述压力气体腔上,所述试验台架具有中间肋板和顶板,所述力传感器固定在缸头支架的所述顶部台面和所述中间肋板之间,所述激光位移传感器固定在所述顶板上。
[0013]
所述减震缸的两端缸头在与活塞杆两端滑动接触的部分设置有密封填料。
[0014]
所述中间肋板和顶板开设有供激光位移传感器的激光穿过的通道。
[0015]
所述压力气体腔连接有压力表。
[0016]
所述激光位移传感器为所述直射式激光三角法位移传感器。
[0017]
本发明的试验台的测试原理如下:
[0018]
测试工作开始时由工控机发出加载指令,向控制机构输入期望的加载载荷,期望的加载载荷即为出气管路输出到压力气体腔13内的气体压力;高压气源17-1的压力气体经开关阀17-2进入到先导式调压阀17-3和出气管路以及进气阀17-4和排气阀17-5的进气口中,气压传感器17-6将检测的压力信号传输到控制机构17-7;
[0019]
当气压传感器17-6检测的压力低于期望的加载载荷时,控制机构17-7控制进气阀17-4打开且排气阀17-5关闭,此时,气体经进气阀17-4进入到旁通气路旁通气路的气压输入到先导式调压阀17-3的先导腔使先导式调压阀17-3的主阀芯下移,先导式调压阀17-3输出的压力升高;当气压传感器17-6检测的压力高于期望的加载载荷时,控制机构17-7控制进气阀17-4关闭且排气阀17-5打开,此时先导式调压阀17-3的先导腔中的压力气体经旁通气路和排气阀17-6排出,先导式调压阀17-3的主阀芯上移,先导式调压阀17-3输出的压力降低;这样的动态调节直至出气管路输出到压力气体腔内的气体压力与期望的加载载荷偏差为0后并保持出气管路输出的气体压力;
[0020]
直流电源2向电磁线圈1-5通电,并且电磁开关阀5打开,压力气体进入到加载气缸6,推动加载活塞7带动减震活塞1-2运动;
[0021]
激光位移传感器10利用直射式激光三角法通过检测位移检测杆的位移变来检测减震活塞的实时位移,并且将检测信号经信号放大器11传输到示波器12;力传感器8检测减震器的阻力,并将该阻力检测信号经经应变放大器9传送到示波器12,示波器12显示阻力与位移之间的关系曲线,在整个测试过程中压力气体腔13内的气体压力始终稳定在期望加载载荷;
[0022]
改变实验条件,重复步骤一至四,通过改变减震器的磁性功能流体中微米级和纳米级磁性粒子的两种混合比,或者通过气动加载模块控制输出不同加载载荷,或者通过控制直流电源电流获得不同磁场强度,得到不同混合比、不同加载载荷、不同磁场强度多种因
素对震动器阻力特性的影响。
[0023]
其中直射式激光三角测量的测量系统主要由激光源、接收透镜、psd光电位置探测器以及信号处理单元组成,psd所在平面和透镜所在平面的交线同入射光束轴线相交且垂直。由于激光三角法测位移的几何关系有:
[0024][0025][0026]
进而得出psd检测位移随被测物面位移的变化如下,
[0027][0028]
激光源将可见红色激光射向位移检测杆的被测面,经被测面散射的激光通过接收透镜,被psd光电位置探测器接收,根据不同的距离,psd光电位置探测器可以在不同的角度下"看见"这个光点。根据检测得到的图4所示角度ф、θ及已知的距离l
’
和l,信号处理单元计算出传感器和被测物体之间的距离。同时,光束在接收元件的位置通过模拟和数字电路处理,并通过信号处理单元分析,计算出相应的输出值,在用户设定的模拟量窗口内,按比例输出标准数据信号。
[0029]
采取三角测量法的激光位移传感器最高线性度可达1um,分辨率更是可达到0.1um的水平。比如zlds100类型的传感器,它可以达到0.01%高分辨率,0.1%高线性度,9.4khz高响应,适应恶劣环境。
[0030]
本发明提出了专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性的试验台,其相比于现有技术获得以下更好的技术效果:
[0031]
本发明提出了专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性的试验台,并具体测试指减震器的磁性功能流体中微米级和纳米级磁性粒子的不同混合比、电磁场强度、加载载荷的大小对减震器减震阻力的影响,相比于现有技术中通用的减震器阻力特性试验台具有更好的针对性,并且检测更加方便高效便于自动控制和对检测结果的自动分析和显示,使检测更加方便快捷并且准确高效。
[0032]
激光位移传感器,激光位移传感器可以非接触测量被测物体的位置变化,对于减震器活塞微小位移变化具有测量高精度、灵敏性高以及信号传输准确高效的技术效果,并且测试结果经示波器直接显示,更加直观、快捷。
[0033]
设计了气动加载模块,通过对控制机构、进气阀、排气阀以及先导调压阀的设计,实现了气动加载、保压和对加载载荷的自动调节控制,保证了加载的准确性和稳定性,并且加载载荷的可调节范围较大,使试验台可测试的工况范围更大。
附图说明
[0034]
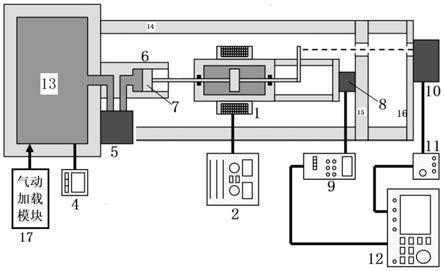
图1是本申请实施例中试验台的主体结构示意图;
[0035]
图2是本申请实施例中试验台的气动加载模块的结构示意图;
[0036]
图3是本申请实施例中试验台的被测减震器模块的结构示意图;
[0037]
图4是本申请实施例中试验台的激光位移传感器的检测原理示意图;
[0038]
图5是本申请实施例中试验台的减震器的磁性功能流体中微米级和纳米级磁性粒子的两种混合比的混合液分别在相同加载载荷、不同磁场强度下的位移-阻力测试结果图;
[0039]
图6是本申请实施例中试验台的减震器的磁性功能流体中微米级和纳米级磁性粒子的两种混合比的混合液分别在不同加载载荷、相同磁场强度下的位移-阻力测试结果图;
具体实施方式
[0040]
下面结合附图和实施例对本发明做进一步说明:
[0041]
一种试验台,所述试验台用专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性,所述阻力特性是指减震器的磁性功能流体中微米级和纳米级磁性粒子的不同混合比、电磁场强度、加载载荷的大小对减震器减震阻力的影响,微米级和纳米级磁性粒子的混合比是指流体介质中微米级粒子和纳米级磁性粒子体积百分比的比值。如附图1-3所示,所述试验台包括气动加载模块17、被测减震器模块1和阻力特性检测模块;
[0042]
所述气动加载模块17的高压气源17-1的主气路连接开关阀17-2,所述开关阀17-2的出气口分别连接先导式调压阀17-3和进气阀17-4的进气口,所述进气阀17-4的出气口分别所述连接先导式调压阀17-3先导腔的旁通气路和排气阀17-5的进气口,所述连接先导式调压阀17-3的出气管路上连接有气压传感器17-6,所述气压传感器17-6连接到控制机构17-7,所述进气阀17-4、排气阀17-5均为二位二通电磁控制高速开关阀,所述进气阀17-4、排气阀17-5均连接到控制机构17-7,所述控制机构17-7连接到电源和工控机,所述出气管路连接到压力气体腔13;
[0043]
所述压力气体腔13经电磁开关阀5连接到加载气缸6,所述加载气缸6内设置有加载活塞7,该加载活塞7固定在活塞杆1-3一端;
[0044]
所述被测减震器模块1的所述活塞杆1-3中部固定有减震活塞1-2,所述活塞杆1-3另一端垂直固定有位移检测杆,减震缸1-1的一端缸头固定有缸头支架,所述位移检测杆在所述缸头支架限定的空间里在减震缸轴向方向上移动;所述减震活塞(1-2)设置在减震缸1-1内并与减震缸(1-1)内腔壁面保持有间隙,所述减震缸(1-1)的内腔充满磁性功能流体,所述磁性功能流体为含有微米级和纳米级磁性粒子的混合液,所述减震缸1-1的缸体外部设有电磁线圈1-5,所述电磁线圈1-5连接直流电源1-2;
[0045]
所述阻力特性检测模块具有激光位移传感器10,所述激光位移传感器10检测位移检测杆的位移变化,并将检测信号经信号放大器11传输到示波器12;在所述缸头支架的顶部台面设置有力传感器8,所述力传感器8经应变放大器9连接到所述示波器12。
[0046]
所述实验台还包括试验台架,所述试验台架的台架支架14下部固定在所述压力气体腔13上,所述试验台架具有中间肋板15和顶板16,所述力传感器8固定在缸头支架的所述顶部台面和所述中间肋板15之间,所述激光位移传感器10固定在所述顶板16上。
[0047]
减震缸1的两端缸头在与活塞杆1-3两端滑动接触的部分设置有密封填料1-4。
[0048]
所述中间肋板15和顶板16开设有供激光位移传感器的激光穿过的通道。
[0049]
所述压力气体腔13连接有压力表4。
[0050]
所述激光位移传感器10为所述直射式激光三角法位移传感器。
[0051]
本发明的试验台的测试原理如下:
[0052]
测试工作开始时由工控机发出加载指令,向控制机构输入期望的加载载荷,期望的记载载荷即为出气管路输出到压力气体腔内的气体压力;高压气源17-1的压力气体经开关阀17-2进入到先导式调压阀17-3和出气管路以及进气阀17-4和排气阀17-5中,气压传感器17-6将检测的压力信号传输到控制机构17-7;当气压传感器17-6检测的压力低于期望的加载载荷时,控制机构17-7控制进气阀17-4打开且排气阀17-5关闭,此时旁通气路的气压输入到先导式调压阀17-3的先导腔使先导式调压阀17-3的主阀芯下移,先导式调压阀17-3输出的压力升高;当气压传感器17-6检测的压力高于期望的加载载荷时,控制机构17-7控制进气阀17-4关闭且排气阀17-5打开,此时先导式调压阀17-3的先导腔中的压力气体经旁通气路和排气阀17-6排出,先导式调压阀17-3的主阀芯上移,先导式调压阀17-3输出的压力降低;这样的动态调节直至出气管路输出到压力气体腔内的气体压力与期望的加载载荷偏差为0后并保持出气管路输出的气体压力。
[0053]
直流电源2向电磁线圈1-5通电,并且电磁开关阀5打开,压力气体进入到加载气缸6,推动加载活塞7带动减震活塞1-2运动,激光位移传感器10利用直射式激光三角法通过检测位移检测杆的位移变来检测减震活塞的实时位移,并且将检测信号经信号放大器11传输到示波器12,并且力传感器8检测减震器的阻力,并将该阻力检测信号经经应变放大器9传送到示波器12,示波器12显示阻力与位移之间的关系曲线,在整个测试过程中压力气体腔13内的气体压力始终稳定在期望加载载荷。并且还可以改变减震器的磁性功能流体中微米级和纳米级磁性粒子的两种混合比、通过气动加载模块控制输出不同加载载荷、控制直流电源电流获得不同磁场强度,得到不同混合比、不同加载载荷、不同磁场强度多种因素对震动器阻力特性的影响。
[0054]
如图4所示,直射式激光三角法测量的激光位移传感器10主要由激光源、接收透镜、psd光电位置探测器以及信号处理单元组成,psd所在平面和接收透镜所在平面的交线同入射光束轴线相交且垂直。由于激光三角法测位移的几何关系有:
[0055][0056][0057]
进而得出psd检测位移随位移检测杆的被测面位移的变化如下,
[0058][0059]
激光源将可见红色激光射向位移检测杆的被测面,经被测面散射的激光通过接收透镜,被psd光电位置探测器接收,根据不同的距离,psd光电位置探测器可以在不同的角度下"看见"这个光点。根据检测得到的图4所示角度ф、θ及已知的距离l
’
和l,信号处理单元计算出传感器和被测物体之间的距离。同时,光束在接收元件的位置通过模拟和数字电路处理,并通过信号处理单元分析,计算出相应的输出值,在用户设定的模拟量窗口内,按比例输出标准数据信号。
[0060]
采取三角测量法的激光位移传感器最高线性度可达1um,分辨率更是可达到0.1um的水平。比如zlds100类型的传感器,它可以达到0.01%高分辨率,0.1%高线性度,9.4khz高响应,适应恶劣环境。
[0061]
如表1所示,在该实施例中,用微米级磁性粒子27.2[vol.%]、纳米级磁性粒子2.8[vol.%]的混合比的磁性功能流体(介质1)在气动加载载荷为0.6mpa时,电流分别为0a、3a、6a的情况下得到附图5所示的介质1的位移-阻力测试结果图;再将该磁性功能流体在电流为6a时,气动加载载荷时别为0.2a、0.4a、0.6a的情况下得到附图6所示的介质1的位移-阻力测试结果图;
[0062]
如表1所示,在该实施例中,用微米级磁性粒子24.4[vol.%];纳米级磁性粒子5.6[vol.%]的混合比的磁性功能流体(介质2)在气动加载载荷为0.6mpa时,电流分别为0a、3a、6a的情况下得到附图5所示的介质2的位移-阻力测试结果图;再将该磁性功能流体在电流为6a时,气动加载载荷时别为0.2a、0.4a、0.6a的情况下得到附图6所示的介质2的位移-阻力测试结果图。
[0063]
试验结果准确可信,试验过程的稳定性好,测试翻边快接,便于自动控制
[0064]
表1
[0065][0066]
本发明提出了专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性的试验台,其相比于现有技术获得以下更好的技术效果:
[0067]
本发明提出了专门用于测试包含有微米级和纳米级磁性粒子的磁性功能流体的减震器的阻力特性的试验台,并具体测试指减震器的磁性功能流体中微米级和纳米级磁性粒子的不同混合比、电磁场强度、加载载荷的大小对减震器减震阻力的影响,相比于现有技术中通用的减震器阻力特性试验台具有更好的针对性,并且检测更加方便高效便于自动控制和对检测结果的自动分析和显示,使检测更加方便快捷并且准确高效。
[0068]
激光位移传感器,激光位移传感器可以非接触测量被测物体的位置变化,对于减震器活塞微小位移变化具有测量高精度、灵敏性高以及信号传输准确高效的技术效果,并且测试结果经示波器直接显示,更加直观、快捷。
[0069]
设计了气动加载模块,通过对控制机构、进气阀、排气阀以及先导调压阀的设计,实现了气动加载、保压和对加载载荷的自动调节控制,保证了加载的准确性和稳定性,并且加载载荷的可调节范围较大,使试验台可测试的工况范围更大。
[0070]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的保护范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1