可移动的探测装置、系统及探测方法与流程
1.本发明一般涉及探测装置技术领域,具体涉及一种可移动的探测装置、系统及探测方法。
背景技术:
2.目前,在港口、海关等地方对于具有密闭空间的物体(例如:集装箱)中的有毒有害气体的检测,往往采用的是在线式或手持式探测装置。在线式设备需要固定安装到集装箱内部或检测物体的密闭空间内才可进行工作,手持式探测装置需要人工携带到现场,人工操作完成气体探测。
3.现有的检测设备,对于在需要检测的物体较多时,检测人员工作强度大效率低,并且人工现场操作,可能接触到有毒有害气体,对操作人员造成伤害。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种可移动的探测装置、系统及探测方法,能够实现自主检测,解放人工提高检测效率,不会对人员造成身体伤害。
5.第一方面,本发明提供的一种可移动的探测装置,包括:主体;
6.机械臂,机械臂连接到主体;
7.采样单元,采样单元设置于机械臂上,用于采集待检测物体内部的试样;
8.感知单元,感知单元用于感测与环境和/或待检测物体相关的数据;
9.控制单元,控制单元设置于主体内部,控制单元用于接收感知单元发送的数据,并根据数据控制机械臂向待检测物体的目标探测位置移动,以及控制采样单元采集从目标探测位置进入待检测物体内部进行气体试样采集,以对待检测物体进行气体探测。
10.作为可选的方案,采样单元包括气管和与气管连接的探针;
11.探针位于机械臂的前端,能够根据要求自动插入待检测物体内部进行气体试样采集。
12.作为可选的方案,采样单元还包括收管器,收管器连接气管,用于自动伸缩和回收气管。
13.作为可选的方案,感知单元包括环境感知单元和感知引导单元,环境感知单元设置于主体上,用于感知气体探测装置所处的环境相关数据并引导主体移动;感知引导单元设置于机械臂的前端,用于感知机械臂与目标探测位置之间的相对方位和/或探针插入待检测物体中的状态信息,并引导机械臂运动。
14.作为可选的方案,感知引导单元包括视觉传感器和距离传感器中的至少一种,用于为机械臂带动采样单元运动至目标探测位置提供指引。
15.作为可选的方案,环境感知单元用于采集待检测物体所在环境的障碍物信息,控制单元还用于根据障碍物信息规划或更改移动单元的移动路径。
16.作为可选的方案,环境感知单元或感知引导单元包括云台相机、深度相机、摄像
头、激光雷达、超声波器件、红外测距传感器中的至少一种。
17.作为可选的方案,控制单元包括主控单元和导航控制单元,主控单元和导航控制单元之间进行信息交互;导航控制单元用于接收感知单元的数据处理得到主体和机械臂运动的路径信息;控制单元用于根据路径信息控制机械臂向待检测物体的目标探测位置移动,以及控制采样单元从目标探测位置进入待检测物体内部进行气体试样采集。
18.作为可选的方案,控制单元通过通信单元将感知单元获取的图像数据传输给遥控终端,
19.用户根据图像数据操作遥控终端,以远程操控主体进行移动和/或操纵机械臂上的采样单元从目标探测位置进入待检测物体内部进行采样;或者,遥控终端自动根据图像数据远程操控主体进行移动和/或操纵机械臂上的采样单元从目标探测位置进入待检测物体内部进行采样。
20.作为可选的方案,探测装置还包括:
21.可移动底盘,可移动底盘设置于主体底部,用于使主体移动。
22.作为可选的方案,探测装置还包括:
23.分析单元,分析单元设置于主体上,用于对采样单元采集的气体试样进行分析,得到探测结果并发送至控制单元。
24.作为可选的方案,探测装置还包括报警单元,用于接收并响应报警指令,做出报警动作;
25.其中,控制单元用于当气体探测结果超过安全阈值时发送报警指令至报警单元。
26.作为可选的方案,探测装置还包括:充电单元,用于在探测装置电量低于阈值时,发送充电指令;
27.其中,控制单元用于获取充电指令,控制单元根据充电指令和预置的充电桩位置信息规划主体的移动路径,以使探测装置移动至充电桩位置实现充电。
28.作为可选的方案,探测装置还包括:人机交互单元,用于执行探测装置与用户的人机交互;
29.其中,控制单元用于控制人机交互单元,并处理来自人机交互单元的数据和/或信号。
30.第二方面,本发明提供一种包括第一方面得到的探测装置的探测系统,所述探测系统包括:
31.监控中心,监控中心与待检测物体相距一定距离,并通过探测装置的通信单元与探测装置的控制单元进行通信,实时传输探测装置的工作状态和探测到的数据;
32.遥控终端,由位于待检测物体所在现场的用户操纵,以控制探测装置的主体和/或机械臂的运动。
33.第二方面,本发明提供一种探测方法,包括:
34.感知单元感测与环境和待检测物体相关的位置和图像数据;
35.控制单元根据位置和图像数据得到目标探测信息,目标探测信息包括探测装置至待检测物体的路径信息以及待检测物体的目标探测位置的相关信息;
36.控制单元根据路径信息控制主体移动至待检测物体;
37.控制单元控制机械臂运动至目标探测位置,并驱动采样单元从目标探测位置进入
待检测物体内部采集气体试样,以对待检测物体进行探测。
38.作为可选的方案,控制单元根据路径信息控制主体移动至待检测物体的过程,包括:
39.感知单元采集待检测物体所在环境的障碍物信息;
40.控制单元根据障碍物信息规划或改变主体的移动路径;
41.控制单元根据移动路径带动移动至待检测物体。
42.作为可选的方案,在控制单元根据路径信息控制主体移动至待检测物体之后,还包括:
43.控制单元控制主体绕待检测物体的周围移动,直至感知单元中的视觉传感器识别出目标探测位置。
44.作为可选的方案,方法还包括:
45.分析单元分析气体试样得到探测结果,并发送至控制单元。
46.作为可选的方案,还包括:
47.控制单元判断气体探测结果是否超过安全阈值;
48.如果超过安全阈值,则控制单元发出报警指令;
49.报警单元接收并响应报警指令,做出报警动作。
50.本发明的可移动的探测装置、系统及探测方法,探测装置控制单元通过感知单元感测的数据控制机械臂向待检测物体的目标探测位置移动,机械臂驱动采样单元从目标探测位置进入待检测物体内部进行气体试样采集。本发明的探测装置可以通过机械臂驱动才采样单元进行采样,无需操作人员和待检测装置进入待检测物体内部,能够自主进行气体探测,解放人工、保障人员安全、操作方便、提高探测效率。
附图说明
51.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
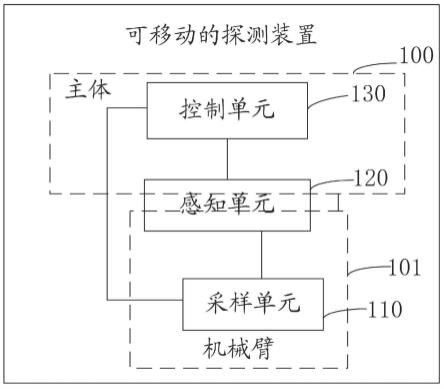
52.图1为本发明的一个实施例的一种可移动的探测装置的结构示意图;
53.图2为本发明的一个实施例的一种可移动的探测装置的外部立体结构示意图(控制单元、分析单元和通信单元位于内部,未示出);
54.图3为本发明的另一个实施例的一种可移动的探测装置的结构示意图;
55.图4是本发明的一个实施例的一种探测方法的流程示意图。
56.图中,100.主体,101.机械臂;
57.110.采样单元,111.气管,112.探针;
58.120.感知单元,121.环境感知单元,122.感知引导单元,123.激光雷达,124.第一超声波器件,125.云台相机、126.第二超声波器件、127.避障超声阵列,128,摄像头;
59.130.控制单元,131.主控单元,132.导航控制单元;
60.140.可移动底盘、150.分析单元、160.报警单元;
61.170.充电单元,171.电量监测模块,172.电量管理模块,173.接触点;
62.180.人机交互单元,181.显示屏,182.触控按钮;
63.190.通信单元。
具体实施方式
64.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
65.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
66.现有检测检测设备需要人工手持携带,如果一次需要监测的集装箱较多时给现场人员带来比较多的负担,同时,人工进场操作,一旦检测到有毒有害气体,很有可能对人员造成伤害。
67.基于上述问题,本技术的一个实施例提供一种可移动的探测装置,可以适用于港口,海关,机场或车站等场所,作为安检的必须配备装置,用于检测有毒有害气体。本实施例的可移动的探测装置,可以适用于诸如集装箱,行李箱,隔离箱等有密闭空间的物体。
68.一种可移动的探测装置,如图1-图3所示,包括:
69.主体100;
70.机械臂101,机械臂101连接到主体100;
71.采样单元110,采样单元110设置于机械臂101上,用于采集待检测物体内部的气体试样;
72.感知单元120,感知单元120用于感测与环境和/或待检测物体相关的数据;
73.控制单元130,控制单元130用于接收感知单元120发送的数据,并根据接收的数据控制机械臂101向待检测物体的目标探测位置移动,以及控制采样单元110从目标探测位置进入待检测物体内部进行气体试样采集,以对待检测物体进行气体探测。
74.其中,探测装置的主体100结构可以大致类似于机器人的主体结构。图2示出了探测装置的立体结构示意图,在主体100中形成中空的内腔,主体100的形状可以是近似于圆柱体,立方体或其他形状,此处,对主体100的具体结构和形状不做限定。内腔用于安装探测装置的分析单元150和主控单元等其他单元。
75.机械臂101可以设置在主体100的一侧(如图2所示),也可以设置在主体100的两侧。
76.采样单元110设置于机械臂101上,机械臂101可带动采样单元110移动至待检测物体的目标探测位置进行气体采样。
77.采样单元110在机械臂101的驱动下插入待检测物体内部进行气体采样。与现有技术不同的是,对于具有密闭空间的待检测物体,机械臂101可位于待检测物体外围,仅需采样单元110的一部分进入待检测物体,操作人员和探测装置的主体100(甚至机械臂101)无需进入待检测物体内部,即可完成对待检测物体内部的气体试样的采集。提高气体探测效率,保障操作人员安全。采样单元110的具体设置形式不做限定,可以是连杆带动吸管,还可以是可伸缩的气管。只要能够在机械臂101的带动下进行移动采样即可。
78.作为可实现的方式,采样单元110包括气管111和与气管111连接的探针112;
79.探针112位于机械臂101的前端,能够根据要求自动插入待检测物体内部进行气体试样采集。其中,探针112优选为尖锐状的,利于插入待检测物体内部。为了更快速采样,探针112和气管111连接处还可以安装隔膜泵。该方案有利于探测装置(机器人)的主体100在
待检测物体外部而只将探针112送入待检测物体内部进行采样,探测装置的主体100无需进入待检测物体内部,操作安全方便同时气管111可以随着机械臂101伸缩输送气体。
80.作为可实现的方式,采样单元110还包括收管器,收管器设置于主体100内部,收管器连接气管111,用于自动伸缩和回收气管111。
81.其中,参见图2和图3,感知单元120包括环境感知单元121和感知引导单元122,环境感知单元121设置于主体上,用于感知气体探测装置所处的环境相关数据(例如探测装置与环境中的障碍物之间的相对方位数据)并引导主体移动;感知引导单元122设置于机械臂的前端,用于感知机械臂和待检测物体之间的位置以及探针插入待检测物体中的状态信息,并引导机械臂运动。
82.作为可实现的方式,感知引导单元122包括视觉传感器和距离传感器中的至少一种,用于为机械臂101带动采样单元110运动至目标探测位置提供指引。其中,距离传感器可以是激光雷达、超声波器件(例如设置在机械臂101上的第二超声波器件126)、红外测距传感器或者它们的组合;视觉传感器可以是深度相机(未在附图中示出)、摄像头128或者它们的组合。本技术对传感器的具体类型不做具体限定,只要能够准确采集与待检测物体相关的数据(包括距离、角度参数数据和图像数据)即可。感知引导单元122用于探测机械臂101和待检物体(集装箱)之间的相对方位和/或气体探针插入集装箱中的状态信息,从而最终通过多传感器融合为机械臂101的自动运动提供指引和安全保护。在另一种实施方式中,摄像头128拍摄的实时图像通过控制单元130和通信单元190传输给用户,用户根据实时图像远程操控机械臂101上的探针112插入待检测物体的目标探测位置中。
83.作为可实现的方式,环境感知单元121包括距离传感器和视觉传感器中的至少一种。距离传感器可以是雷达(例如设置在主体上的激光雷达123)、超声波器件(例如设置在主体100上部的第一超声波器件124、设置在主体100的底部的避障超声阵列127)。视觉传感器可以是安装在云台上的相机,例如设置在主体上的云台相机125、深度相机(未在附图中示出)以及安装在机械臂101上的摄像头128。本实例对传感器的具体类型不做具体限定,只要能够准确采集与环境相关的数据(包括距离、角度参数数据和图像数据)即可。环境感知单元121用于采集待检测物体所在环境的障碍物信息、周边的实时图像等数据,并将相关的数据传送给控制单元130(具体可以是控制单元130中的导航),控制单元130还可根据障碍物信息等数据规划或更改主体100或机械臂101的移动路径。
84.示例地,环境感知单元121设置于主体100上,用于感知气体探测装置所处的环境相关数据并引导主体100移动;感知引导单元122设置于机械臂101的前端,用于探测机械臂101和待检测物体之间的位置以及探针112插入待检测物体中的状态信息。其中,探针112插入待检测物体中的状态信息是指探针112是否插入到待检测物体内部,以及插入待检测物体内部的深浅。
85.其中,控制单元130包括主控单元131和导航控制单元132,主控单元131和导航控制单元132之间进行信息交互;导航控制单元132用于接收感知单元120的数据处理得到主体100和机械臂101运动的路径信息;主控单元131用于根据路径信息控制机械臂101向待检测物体的目标探测位置移动,以及控制采样单元110从目标探测位置进入待检测物体内部进行气体试样采集。
86.主控单元131和导航控制单元132可以是一个单独的硬件部件,其中分别设置有实
现不同功能的程序代码或逻辑电路;或者主控单元131和导航控制单元132也可以是两个独立的硬件部件,两种情况均属于本技术的保护范围之内。
87.导航控制单元132包括运动控制器、电机驱动器、安全防护模块等导航控制相关的单机设备构成。导航控制单元进行数据处理,最终完成slam、导航定位、路径规划、避障跌落检测、移动行走、安全急停等底层导航功能;主控单元131还可以包括用于完成人机交互、操控、任务管理和规划、气体传感器数据管理、视觉指引算法控制、机械臂控制等所有系统相关业务功能支持的核心控制器。
88.主控单元131还可以对导航控制单元发送控制指令,此处的控制指令指的可以是获取目标探测位置信息的指令,还可以是当前位置至待检测物体的路径信息的指令;导航控制单元132根据控制指令定位目标探测位置,并将目标探测位置信息传输给主控单元131。主控单元131根据目标探测位置控制主体100移动,同时控制机械臂101驱动采样单元110进行适当的调整移动至目标探测位置,以便进行气体采样。主控单元131还用于获取探测结果,将探测结果可以发送给其他设备以供使用,例如说主控单元131可以将探测结果发送给探测装置的后台服务器,方便管理探测结果数据。
89.需要说明的是,主控单元131控制主体100的过程中,导航控制单元132还可以根据环境感知单元121或感知引导单元122发送的障碍物信息数据规划或更改主体100的移动路径,避免探测装置在移动过程中与障碍物撞击导致的损坏。
90.作为可实现的方式,控制单元130还包括视觉识别模块,视觉识别模块用于处理感知单元120采集的图像数据,用以识别出待检测物体上的目标探测位置。例如,该视觉识别模块可自动识别集装箱尾部,并根据集装箱尾部位置识别出最佳探测位置,并指导机械臂101完成工作。在实际工作中,该气体探测装置(机器人)在到达待检测物体后围绕待检测物体(例如集装箱)移动,同时进行视觉扫描,直至识别出目标探测位置后停止移动,然后所述视觉识别模块指引机械臂101朝着目标探测位置移动。
91.示例地,导航控制单元132首先定位待检测物体的位置,再进一步确定出如何从当前位置移动到待检测物体周围,最后从待检测物体上定位出目标探测位置。其中,目标探测位置可以是待检测物体的门缝隙,窗户缝或通气孔等地方。示例地,港口需要对货物集装箱进行气体探测,首先需要定位出货物集装箱的位置(集装箱在哪里),探测装置如何移动到集装箱的外围(路径信息),最后需要定位出货物集装箱上的目标探测位置(例如:集装箱的门缝或窗户缝)。一般地,集装箱都设置有箱门,集装箱上箱门的缝隙位置即就是目标探测位置。也可以是集装箱外部设置有通气孔,通气孔的位置即就是目标探测位置。
92.本发明实施例的可移动的探测装置的主控单元通过感知引导单元感测的数据控制机械臂向待检测物体的目标探测位置移动,机械臂驱动采样单元从目标探测位置进入待检测物体内部进行气体试样采集。本发明的探测装置可以通过机械臂驱动才采样单元进行采样。本实例的探测装置能够自行移动采样,在检测任务量大时,探测装置能够提高探测效率,不需要操作人员或探测装置进入待检测物体内部,解放人工同时避免了人身伤害,操作安全方便。当然,在另一实施例中,用户可以根据感知引导单元中的安装在机械臂前端的摄像头拍摄。
93.作为可实现的方式,探测装置还包括:可移动底盘140,可移动底盘140设置于主体100底部,用于使主体100移动。其中,可移动底盘140连接驱动组件,控制单元130与可移动
底盘140和驱动组件电连接。控制单元130可以发送控制指令给驱动组件,驱动组件根据接收到的指令带动可移动底盘140进行移动,进而实现主体100的移动。
94.可以理解的是,移动单元可以集合传动、行驶、转向、减震和制动等功能,承受动力保证探测装置正常行驶。移动单元的移动方式具有多种,此处不做限定,可以是通过轮子移动(例如万向轮,滚轮)还可以是通过履带移动等。
95.作为可实现的方式,探测装置还包括:分析单元150,分析单元150设置于主体100上,分析单元150用于对采样单元110采集的气体试样进行分析,得到探测结果并发送至控制单元130,具体可以是发送至控制单元中的主控单元131。主控单元131能够通过通信单元将探测结果发送给远程服务器或者用户。
96.分析单元150可以采用各种有毒有害气体传感器、在线式气体检测传感器等。此处的有毒有害气体传感器或在线式气体检测传感器还可以使用违禁品探测模块,该违禁品探测模块内置有各种生化气体分析算法,能够识别和监测有毒有害气体的种类和浓度。气体分析模块可以设置在上述气体收集箱内部,也可以通过管路与气体收集箱连接,对采样单元110采集的气体试样进行分析得到探测结果,该探测结果一般是气体的种类和浓度。本实施例中的分析单元150能够对常见的熏蒸剂(磷化氢、甲基溴等)、工业常见的有毒有害气体(一氧化氮、二氧化氮、氨气、硫化氢、可燃气体、有机会发气体)进行种类和浓度的分析。
97.作为可实现的方式,控制单元通过通信单元190将感知单元获取的图像数据传输给遥控终端;用户根据图像数据操作遥控终端,以远程操控主体进行移动和/或操纵机械臂上的采样单元从目标探测位置进入待检测物体内部进行采样;或者,遥控终端自动根据图像数据远程操控主体进行移动和/或操纵机械臂上的采样单元从目标探测位置进入待检测物体内部进行采样。通信单元190和遥控终端之间的通信方式可以采用无线或有线的方式,其中,无线方式包括gprs、wifi或zigbee等方式。
98.作为可实现的方式,探测装置还包括报警单元160,用于接收并响应报警指令,做出报警动作;
99.其中,控制单元130用于当气体探测结果超过安全阈值时发送报警指令至报警单元160。
100.此处的探测结果超过安全阈值指的是气体浓度超过安全阈值。报警单元160有利于用户能够了解待检测物体的气体信息,即使在海关检测任务量大时,也能快速掌握待检测物体的气体信息,以便工作人员能够做好防护和后续检查。
101.本实施方式中报警单元160可以设置在主体100上,也可以设置在主体100外部待检测物体的所在区域中。
102.当报警单元160位于主体100上时,报警单元160可与控制单元130电连接。
103.当报警单元160位于待检测物体所在区域时(待检测物体所在场地或者监控中心内),控制单元130与报警单元160之间通信连接,可以是有线通信或无线通信,无线通信方式可以采用蓝牙、wifi或gprs等。报警单元160报警信息可以采用语音、灯光、界面显示中一种或任意几种的组合的形式。可以理解的是报警单元160可以是指示灯、显示屏、喇叭或蜂鸣器等,此处不做限定。
104.作为可实现的方式,如图2和图3所示,探测装置还包括充电单元170,充电单元170在探测装置电量低于阈值时,发送充电指令,控制单元130还用于获取充电指令,控制单元
130根据充电指令和预置的充电桩位置信息规划主体100的移动路径,以使探测装置移动至充电桩位置实现充电。本实施方式有便于电量过低时及时为探测装置充电,保证探测装置正常工作。充电单元170的设置形式不做限定。示例地,充电单元170可以包括但不限于电量监测模块171、电量管理模块172和接触点173,电量监测模块171和电量管理模块172连接,接触点173设置在主体100靠近地面的一侧,用于和充电桩对应连接。当电量监测模块171监测到电池电量低于阈值时,电量监测单元171将电量不足的信号发送给电量管理模块172,电量管理模块172根据接收到的电量不足的信号发送充电指令给控制单元130,控制单元130根据接收到的充电指令发送充电桩路径信息给控制单元130,控制单元130根据充电桩路径信息控制主体100进行移动,以使接触点173和充电桩的金属触点对应连接,实现探测装置的自动充电。
105.作为一种实施方式,主控单元131中预存有充电桩的位置或充电桩所在位置的图像信息,主控单元131根据导航控制单元132定位到的探测装置的位置信息和充电桩的位置信息规划路线控制主体100移动。
106.作为另外一种实施方式,主控单元131可以通过接收导航控制单元132发送的充电桩位置信息和地图信息,根据该充电桩位置信息和地图信息规划路线控制主体100移动。
107.作为另外一种实施方式,用户通过遥控终端发送充电桩位置信息和地图信息,主控单元131根据接收到的充电桩位置信息和地图信息规划路线控制主体100移动。此处还可以是,用户自己根据眼睛获取的充电桩位置信息,通过遥控终端控制主体100移动值充电桩位置。
108.作为可实现的方式,如图2和图3所示,还包括人机交互单元180,人机交互单元180执行探测装置与用户的人机交互;其中,控制单元130用于控制人机交互单元180,并处理来自人机交互单元180的数据和/或信号。
109.在一些实施方式中,人机交互单元180还包括显示屏181和触控按钮182,显示屏181主要用于目标探测信息、探测结果、电量信息;触控按钮182用于控制探测装置的工作状态,工作状态包括探测装置的打开或关闭、主体100的运动或停止、控制单元130的打开或关闭、采样单元110的启动和关闭等。以便于用户操作。触控按钮的具体设置方式在此不做限定,例如触控按钮可以包括控制主体100运行或停止的触控按钮,和/或包括控制探测装置打开或关闭的触控按钮等,只要用户通过触控按钮能够控制探测装置的工作状态即可。
110.本发明的可移动探测装置,通过传感与感知单元和主控单元定位出待检测物体的目标探测位置,根据目标探测位置控制探测装置移动至待检测物体外围,驱动机械臂带动采样单元进入待检测物体内部采集气体试样,以实现气体探测。本发明的探测装置无需进入待检测物体内部即可采样探测,保障操作人员安全,同时能够自主移动采样,提高探测效率。本发明的探测装置还可以通过报警单元可以发出报警信息,方便工作工作人员快速了解待检测物体的气体信息,在移动过程中还可以自动避障,避免与其他障碍物发生碰撞,造成损坏。
111.另一方面本发明提供一种探测系统,包括上述的探测装置,还包括:
112.监控中心,监控中心与待检测物体相距一定距离,并通过探测装置的通信单元与探测装置的控制单元进行通信,实时传输探测装置的工作状态和探测到的数据;
113.遥控终端,由位于待检测物体所在现场的用户操纵,以控制探测装置的主体和/或
机械臂的运动。
114.监控中心和/或遥控终端与控制单元130通信,实时传输探测装置的运行状态和探测结果。保证了工作人员可以远距离操作,保障人员安全,同时能够实时得到探测数据为后续工作提供可靠指导。
115.作为可实现的方式,用户操纵遥控终端控制主体100进行移动,该遥控终端可以是由站在现场的用户手持的遥控器,也可以是位于监控中心内的用户操作的计算机;在另一实施方式中,还可由遥控终端(例如位于监控中心内的计算机)自动控制所述可移动的探测装置主体100进行移动。
116.作为可实现的方式,还可由用户操纵遥控终端控制机械臂101移动至目标探测位置并驱动采样单元110从目标探测位置进入待检测物体内部进行气体试样采集,该遥控终端可以是由站在现场的用户手持的遥控器,也可以是位于监控中心内的用户操作的计算机;在另一实施方式中,还可由遥控终端(例如位于监控中心内的计算机)自动控制所述机械臂101进行移动。
117.具体的,用户可以手持遥控终端,主体100上设置有接收器,遥控终端和接收器之间可以进行相互通信,遥控终端用于发送控制指令给接收器,接收器用于接收控制指令,其中控制指令可用于获取目标探测位置、控制探测装置移动和/或采集气体试样、获取气体探测结果。接收器分别与采样单元110、感知单元120和控制单元130等电连接。遥控终端还可以获取该障碍物信息根据该障碍物信息重新规划主体100的移动路径,避免探测装置在移动过程中与障碍物撞击导致的损坏。
118.应当注意,尽管在上文详细描述中提及了用于动作执行的设备的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本公开的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
119.另一方面,本发明的另一个实施例提供了一种探测方法,在上述实施例的基础上,如图4所示,该方法具体包括如下:
120.s101、感知单元感测与环境和待检测物体相关的位置和图像数据;
121.s102、控制单元根据位置和图像数据得到目标探测信息,目标探测信息包括探测装置至待检测物体的路径信息以及待检测物体的目标探测位置的相关信息;
122.具体的控制单元首先定位待检测物体的位置,以及探测装置至待检测物体的路径,再进一步的从待检测物体上定位出目标探测位置。
123.s103、控制单元根据路径信息控制主体移动至待检测物体;
124.s104、控制单元控制机械臂运动至目标探测位置,并驱动采样单元从目标探测位置进入待检测物体内部采集气体试样,以对所述待检测物体进行探测。
125.需要说明的是,本实施例的方法可以应用于执行上述所示装置实施例的技术方案,其实现原理和技术效果类似。在本实施例中,感知单元的设置方式不做具体限定。感知单元可以是激光雷达、超声波器件、视觉相机等传感器中的一种或多种的组合。采样单元在机械臂的驱动下,从控制单元基于感知单元的数据定位出的目标探测位置,插入待检测物体内部进行气体采样。与现有技术不同的是,对于具有密闭空间的待检测物体,通过机械臂的运动并驱动采样单元进行采样,探测装置不需要进入待检测物体内部,能够完成对待检
测物体内部的气体试样的采集。提高气体探测效率,保障操作人员安全。
126.示例地,港口需要对货物集装箱进行气体探测,首先感知单元通过采集集装箱的图像,港口环境图像等,并将采集的图像书发送至控制单元,控制单元内置的算法处理得到货物集装箱的位置,然后规划处从当前位置至货物集装箱的路径信息,最后定位出货物集装箱上的箱门的缝隙位置。探测装置按照路径信息移动至集装箱外围,机械臂驱动采样单元从集装箱的箱门缝隙处插入探头进行气体采样;当然,也可以是探测装置移动到集装箱周围后,再定位待检物体的箱门的缝隙位置,之后机械臂驱动采样单元从集装箱的箱门缝隙处插入,探头进行气体采样。
127.上述实施例的探测方法,无需进入待检测物体内部,且无需要人工操作,可以自动进行移动和/或采样,并自主分析,提高气体探测效率,保障了操作人员安全。
128.作为可实现的方式,控制单元根据路径信息控制主体移动至待检测物体的过程,包括:
129.感知单元中采集待检测物体所在环境的障碍物信息;
130.控制单元根据障碍物信息规划或改变主体的移动路径;
131.控制单元根据移动路径带动移动至待检测物体。
132.需要说明的是,在探测装置根据控制单元的目标探测位置信息移动的过程中遇到障碍物时,障碍物能够被感知单元识别并形成障碍物信息。控制单元根据障碍物信息规划探测装置的移动路径,避免探测装置在移动过程中与障碍物撞击导致的损坏。
133.作为可实现的方式,在控制单元根据路径信息控制主体移动至待检测物体之后,还包括:
134.控制单元控制主体绕待检测物体的周围移动,直至感知单元中的视觉传感器识别出目标探测位置。
135.作为可实现的方式,所述方法还包括:
136.分析单元分析气体试样得到探测结果,并发送至控制单元。
137.采样单元采集的气体试样通过分析单元分析得到气体的种类和浓度,实现气体探测。分析单元可以采用各种有毒有害气体传感器、在线式气体检测传感器等。此处的有毒有害气体传感器或在线式气体检测传感器还可以使用违禁品探测模块,该违禁品探测模块内置有各种生化气体分析算法,能够识别和监测有毒有害气体的种类和浓度。气体分析模块可以设置在上述气体收集箱内部,也可以通过管路与气体收集箱连接,对采样单元采集的气体试样进行分析得到探测结果,该探测结果一般是气体的种类和浓度。本实施例中的分析单元能够对常见的熏蒸剂(磷化氢、甲基溴等)、工业常见的有毒有害气体(一氧化氮、二氧化氮、氨气、硫化氢、可燃气体、有机会发气体)进行种类和浓度的分析。
138.作为可实现的方式,还包括:
139.控制单元判断气体探测结果是否超过安全阈值;
140.如果超过安全阈值,则控制单元发出报警指令;
141.报警单元接收并响应报警指令,做出报警动作。
142.需要说明的是,探测结果超过安全阈值指的是气体浓度超过安全阈值,当气体试样的浓度超过安全阈值时,发出报警指令给报警单元,以便于用户能够了解待检测物体的气体信息,即使在海关检测任务量大时,也能快速掌握待检测物体的气体信息,以便工作人
员能够做好防护和后续检查。
143.本技术实施例提供的探测方法,控制单元通过感知单元感测的数据控制机械臂向待检测物体的目标探测位置移动,机械臂驱动采样单元从目标探测位置进入待检测物体内部进行气体试样采集。本发明的探测装置可以通过机械臂驱动才采样单元进行采样。本实例的探测装置能够自行移动采样,在检测任务量大时,探测装置能够提高探测效率,不需要操作人员或探测装置进入待检测物体内部,解放人工同时避免了人身伤害,操作安全方便。
144.应当注意,尽管在附图中以特定顺序描述了本发明方法的操作,但是,这并非要求或者暗示必须按照该特定顺序来执行这些操作,或是必须执行全部所示的操作才能实现期望的结果。相反,流程图中描绘的步骤可以改变执行顺序。附加地或备选地,可以省略某些步骤,将多个步骤合并为一个步骤执行,和/或将一个步骤分解为多个步骤执行。此外,通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。
145.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1