一种巡检机器人环境信息检测装置的制作方法
1.本实用新型涉及巡检机器人技术领域,具体涉及一种巡检机器人环境信息检测装置。
背景技术:
2.随着经济的发展及技术的进步,目前在电力线路、城市地下综合管廊或输煤栈桥等场所,需要定期安排人力去对现场设备运行情况、现场环境进行检测,此种方式检测效率低。目前很多场所开始引入自动巡检机器人,其中对于现场设备运行情况和现场环境的监测,均需要配置各种各样的传感器,如各种有毒有害气体检测传感器、烟雾、粉尘、温湿度传感器等。目前大部分机器人制造商均将和各传感器随意安装在机器人有空间的角落,各传感器零散,不仅造成整体布局混乱、线路繁多、安装维护极不方便,同时也造成对机器人本体防护、电磁屏蔽要求特别高。
技术实现要素:
3.本实用新型要解决的技术问题就在于:针对现有技术存在的技术问题,本实用新型提供一种结构简单紧凑的巡检机器人环境信息检测装置。
4.为了解决上述技术问题,本实用新型采用的技术方案为:
5.一种巡检机器人环境信息检测装置,包括盒体、盖板、粉尘检测组件、温湿度检测组件和气体传感器模组;所述盒体的一面开口,所述盖板安装于所述开口处;所述粉尘检测组件、温湿度检测组件和气体传感器模组均安装于所述盒体内;所述粉尘检测组件包括粉尘传感器和防护板,所述粉尘传感器的气体输入口通过接头伸出至盒体外,所述粉尘传感器通过防护板安装于所述盒体内,所述防护板与所述盒体之间围合形成气体输出通道,所述盒体上设有排气孔,所述气体输出通道的两端分别与所述粉尘传感器的气体输出口和排气孔相连通。
6.作为上述技术方案的进一步改进:
7.所述温湿度检测组件包括温湿度传感器,所述盒体的底部设有透气孔,所述温湿度传感器的检测部安装于盒体的透气孔处。
8.所述盖板上设有出线连接器。
9.所述气体传感器模组包括气体传感器组件、底板、顶板和调节紧固组件;所述气体传感器组件包括多种不同类型的气体传感器;所述底板上设有多个与各气体传感器相对应的检测孔,各所述气体传感器通过调节紧固组件安装于所述底板与顶板之间,且各气体传感器的检测头位于所述检测孔内。
10.所述调节紧固组件包括多个导向调节杆,多个所述导向调节杆的一端紧固于所述底板上,另一端则贯穿所述顶板后通过锁紧螺母进行紧固。
11.所述导向调节杆包括固定杆和调节杆,所述固定杆的一端固定于所述底板上,所述调节杆的一端所述固定杆的另一端螺纹连接以实现高度调节。
12.所述气体传感器模组还包括烟雾传感器,所述烟雾传感器通过紧固组件安装于所述底板上。
13.所述紧固组件包括多个安装柱和螺钉,多个安装柱的底端紧固于所述底板上,所述烟雾传感器则位于安装柱的顶端,所述螺钉穿过所述烟雾传感器上的安装孔与所述安装柱的顶端螺纹连接。
14.与现有技术相比,本实用新型的优点在于:
15.本实用新型将盒体与盖板形成的结构为电磁屏蔽密闭盒,并将多种传感器紧凑布置于一个集电磁屏蔽和高防护等级的密闭盒,且通过单一的出线连接器与外部进行连接,彻底解决现有传感器布局混乱、线路繁多、安装维护困难等问题;另外由于电磁屏蔽密闭盒防护等级高、电磁屏蔽好,可以大大降低巡检机器人本体的防护等级、电磁屏蔽等要求,甚至可以完全省去机器人本体做防护及屏蔽的额外成本。
附图说明
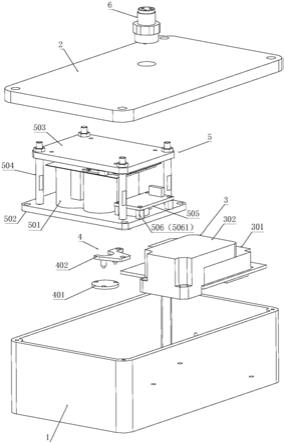
16.图1为本实用新型的装置在实施例的爆炸结构示意图。
17.图2为本实用新型的装置在实施例的主视结构示意图。
18.图3为图2的d-d视图。
19.图4为本实用新型的装置在实施例的俯视结构示意图。
20.图5为图4的a-a视图。
21.图6为本实用新型的装置在实施例的仰视结构示意图。
22.图7为本实用新型的气体传感器模组在实施例的立体结构示意图。
23.图8为本实用新型的气体传感器模组在实施例的主视结构示意图。
24.图例说明:1、盒体;101、通孔;2、盖板;3、粉尘检测组件;301、粉尘传感器;302、防护板;303、接头;304、排气孔;4、温湿度检测组件;401、温湿度传感器;402、压板;403、透气孔;5、气体传感器模组;501、气体传感器组件;502、底板;5021、检测孔;503、顶板;504、调节紧固组件;5041、导向调节杆;50411、固定杆;50412、调节杆;5042、锁紧螺母;505、烟雾传感器;506、紧固组件;5061、安装柱;6、出线连接器。
具体实施方式
25.以下结合说明书附图和具体实施例对本实用新型作进一步描述。
26.如图1所示,本实施例的巡检机器人环境信息检测装置,包括盒体1、盖板2、粉尘检测组件3、温湿度检测组件4和气体传感器模组5;盒体1的顶面开口,盖板2则密封安装于盒体1顶面的开口处,以形成密封结构;其中,粉尘检测组件3、温湿度检测组件4和气体传感器模组5均安装于盒体1内;粉尘检测组件3包括粉尘传感器301和防护板302,粉尘传感器301通过防护板302安装于盒体1内,粉尘传感器301的气体输入口通过接头303伸出至盒体1外,防护板302与盒体1之间围合形成气体输出通道,盒体1上设有排气孔304,气体输出通道的两端分别与粉尘传感器301的气体输出口和排气孔304相连通;另外,盖板2上则设有出线连接器6,各粉尘检测组件3、温湿度检测组件4和气体传感器模组5的电缆电线则经出线连接器6引出至盒体1外。另外,盒体1与盖板2形成的结构为电磁屏蔽密闭盒,如盒体1与盖板2采用金属(如铁等)制成,或者在盒体1与盖板2上涂覆有电磁屏蔽涂层等以实现电磁屏蔽。通
过上述结构的设置,将多种传感器紧凑布置于一个集电磁屏蔽和高防护等级的密闭盒,且通过单一的出线连接器6与外部进行连接,彻底解决现有传感器布局混乱、线路繁多、安装维护困难等问题;另外由于电磁屏蔽密闭盒防护等级高、电磁屏蔽好,可以大大降低巡检机器人本体的防护等级、电磁屏蔽等要求,甚至可以完全省去机器人本体做防护及屏蔽的额外成本。
27.如图1和图3所示,本实施例中,温湿度检测组件4包括温湿度传感器401和压板402,温湿度传感器401则通过压板402固定于盒体1的底部,其中盒体1的底部相对应设有透气孔403,温湿度传感器401的检测部密封安装于盒体1的透气孔403处,从而通过透气孔403对盒体1外部的环境温度和湿度进行检测。上述结构的温湿度检测组件4仅仅通过透气孔403与外部环境接触,从而能够避免外部环境对温湿度传感器401的影响,提高其使用寿命。
28.如图3所示,本实施例中,气体传感器模组5和粉尘检测组件3分别位于盒体1的两侧,温湿度检测组件4则位于气体传感器模组5与粉尘检测组件3之间。如图7和图8所示,其中气体传感器模组5包括气体传感器组件501、底板502、顶板503和调节紧固组件504;气体传感器组件501包括多种不同类型的气体传感器,如用于检测co、h2s、ch4、nh3等的气体传感器;底板502紧固于盒体1内,底板502上设有多个与各气体传感器相对应的检测孔5021,各气体传感器通过调节紧固组件504安装于底板502与顶板503之间,且各气体传感器的检测头位于检测孔5021内且与检测孔5021密封连接,相对应地,盒体1上设有与检测孔5021相对应的通孔101。在进行检测时,各气体传感器的检测头则通过检测孔5021以及通孔对盒体1外界的气体进行检测,而各气体传感器本身则位于盒体1内而不与外界环境接触,从而避免外部环境对各气体传感器的影响,提高其使用寿命。另外,调节紧固组件504包括多个导向调节杆5041,分布于底板502的四角位置处,其中导向调节杆5041包括固定杆50411和调节杆50412,固定杆50411的一端固定于底板502上,调节杆50412的一端与固定杆50411的另一端螺纹连接以实现高度调节,另一端则贯穿顶板503后通过锁紧螺母5042进行紧固。通过上述调节杆50412的高度调节,从而通过底板502与顶板503对不同类型、不同高度的气体传感器进行夹持固定。
29.如图7和图8所示,进一步地,气体传感器模组5还包括烟雾传感器505,烟雾传感器505通过紧固组件506安装于底板502上。紧固组件506则具体包括多个安装柱5061和螺钉,多个安装柱5061的底端紧固于底板502上,烟雾传感器505则位于安装柱5061的顶端,螺钉穿过烟雾传感器505上的安装孔与安装柱5061的顶端螺纹连接。上述气体传感器模组5结构简单紧凑、拆装便捷。
30.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1