三维异形平面孔径全息成像安检雷达的制作方法
:
[0001]
本实用新型涉及安检领域,特别是利用毫米波全息成像技术进行安检,具体地提供一种三维异形平面孔径全息成像安检雷达。
背景技术:
:
[0002]
随着社会经济的发展,机场、火车站、地铁、汽车站等公共交通枢纽迎来了越来越多的客流和物流,这些区域的安检等级既要排除安全隐患以保证公共安全,又要满足快速通过的高检测效率,传统的视频监控、人脸识别、人体体温探测、金属探测、x射线成像等安检技术已经逐渐不能满足需求。近年来,欧美发达国家逐渐采用毫米波全息成像技术在机场用于安检,特别是用于旅客的人身安检,该技术能够快速探测出待检查物体的材质是金属还是非金属、是固体还是液体,甚至对于有包装的危险气体也有查验能力,而且检查中无需与旅客身体接触,也不需要旅客脱掉外套或原地转身,大大提高了安检舒适度以及安检效率。
[0003]
毫米波全息成像技术是利用电磁波的相干原理,通过采集空间干涉条纹,记录目标上每个散射点的衍射图样,最后通过图像重建就可得到目标的毫米波图像,具有穿透成像、高分辨率、低辐射等特性;目前世界各国的研究机构、企业对该技术保持着长期密切的关注,例如专利cn201010598647.0公开了一种用于全息成像安检系统的毫米波收发模块,包括工作于毫米波频段毫米波射频收发前端、工作于毫米波频段毫米波收发开关树阵列和工作于毫米波频段毫米波收发天线阵列,所述毫米波收发开关树阵列前后分别连接毫米波射频收发前端和毫米波收发天线阵列;又例如专利cn201110334768.9公开了一种毫米波主动式三维全息成像的人体安检系统,包括具有出入口的圆柱状主体框架、第一毫米波收发机、第二毫米波收发机、与所述第一毫米波收发机连接的第一毫米波开关天线阵列、与所述第二毫米波收发机连接的第二毫米波开关天线阵列、旋转扫描驱动装置、控制装置以及并行图像处理装置,所述并行图像处理装置用于根据来自第一和第二毫米波收发机的采集数据及该采集数据的空间位置信息合成待检人员的三维全息图像;还例如专利cn201610046575.6公开了一种毫米波全息三维成像检测系统,毫米波全息三维成像检测系统包括发射天线、接收天线、毫米波收发模块、扫描装置、数据采集和处理模块、以及图像显示单元,其举例了1排毫米波收发系统可以包括64个毫米波收发模块以及128个天线,具有缩短成像时间和较大的视场等优点;还例如专利cn201720657908.9公开了一种自动人行道式毫米波全息成像安检系统,包括毫米波开关阵列雷达、自动人行道和自动扶手,所述毫米波开关阵列雷达设有一个或一个以上的毫米波开关阵列雷达,且竖直设置于自动人行道的两侧,自动扶手呈封闭环状结构设置于自动人行道的上方,毫米波开关阵列雷达对自动人行道上的人体扫描检测,毫米波开关阵列雷达包括天线阵列、开关矩阵、发射机、接收机、a/d采集、成像处理机,该安检系统需要对向放置安装两个毫米波开关阵列雷达,才能实现待检人员不需要转身,单次扫描完成双面人体立体成像;这些常规的现有技术存在以下缺点:主要以雷达数据获取为主,与视频监控、人脸识别、人体体温探测、金属探测难以融合,且不
能实现雷达图像与光学图像之间的融合,无法针对旅客进行全方位的监测,需要旅客在安检时需要转动180
°
,安检过程繁琐,检测效率相对较低,在快速流动区域的应用受到限制;采用扫频或调频整个信号带宽进行数据获取,受雷达信号带宽、信号调制时间、调频率线性度等多个方面的影响,实际数据获取时间相对较长,随着分辨率和时间响应时间需求的提升,已发展到瓶颈;观测角度相对较为单一,只能在某一个等效观测视角对人体表面及附属物进行成像,难以获得人体侧面的目标,且算法也只能用于常规单一平面孔径成像;采用相邻阵元等效获取观测目标的三维图像,增加了系统的通道数,以1024点等效采样为例,则需要物理单元数为1024个,随着分辨率和观测范围的提升,其阵元数及其射频通道的数量会大幅度增长,系统的低成本化等问题将会越来越突出;需要保持匀速运动,增加了系统控制的难度,也增大了系统由于稳定性的要求而增大系统重量;同时,常规成像系统时序控制单一,交叉验证困难,经常性出现数据丢失等一系列问题;安检成像的模块化程度相对较低,迫切需要兼顾系统集成度;安检成像目标识别方法过程中,神经网络模型提取的预测框的数量庞大,计算量大,其提取过程难以获得充足的语义信息,不利于目标检测与识别。
技术实现要素:
:
[0004]
本实用新型所要解决的技术问题是针对现有技术存在安检检测效率较低、无法实现雷达图像与光学图像之间的融合以及安检成像的模块化程度较低等缺点,提供一种三维异形平面孔径全息成像安检雷达。
[0005]
本实用新型解决其技术问题所采取的技术方案是:三维视觉异形平面孔径全息成像安检雷达,用于对安检通道内的观测目标进行安检,包括分布式天线分系统、多子带收发分系统、数据采集与记录分系统、伺服运动分系统和工业控制与处理分系统,其特征在于:
[0006]
所述分布式天线分系统包括至少两个线性天线阵列,所述线性天线阵列用于将接收的电激励信号转化为电磁波,然后将电磁波作为发射信号发射出去并接收回波信号;
[0007]
所述多子带收发分系统与所述分布式天线分系统通信连接,所述多子带收发分系统用于产生电激励信号和接收回波信号,并对所述回波信号进行多子带解调产生模拟视频信号;
[0008]
所述数据采集与记录分系统与所述多子带收发分系统和所述工业控制与处理分系统通信连接,所述数据采集与记录分系统用于对所述模拟视频信号进行模数转换采样和记录,形成雷达回波数据;
[0009]
所述伺服运动分系统用于驱动所述分布式天线分系统沿竖直方向运动,以使所述至少两个线性天线阵列在空间中形成三维异形平面孔径;
[0010]
所述工业控制与处理分系统对接收的所述雷达回波数据进行数据处理以获得检测图像。
[0011]
优选地,每个线性天线阵列包括三个稀疏子阵,每个稀疏子阵包括多个发射阵元和多个接收阵元。
[0012]
更优选地,每个线性天线阵列的相邻两个稀疏子阵之间的夹角为θ,θ的范围为90
°
~ 180
°
。
[0013]
更优选地,每个线性天线阵列中的发射阵元的数量等于接收阵元的数量,多个发射阵元在水平方向上“一”字排列,多个接收阵元在水平方向上“一”字排列,多个发射阵元
在竖直方向上位于多个接收阵元的上方,相邻两个发射阵元或相邻两个接收阵元之间的距离为s,任一个发射阵元和相邻的接收阵元之间在水平方向上的距离为s/2。
[0014]
更优选地,每个稀疏子阵包括多个发射阵元组和多个接收阵元组,所述发射阵元组和接收阵元组在水平方向上“一”字排列且交替分布,每个发射阵元组包括至少一个发射阵元,每个接收阵元组包括至少一个接收阵元。
[0015]
更优选地,每个稀疏子阵包括多个发射阵元组和多个接收阵元组,多个发射阵元组在水平方向上“一”字排列,多个接收阵元组在水平方向上“一”字排列,多个接收阵元组在竖直方向上位于多个发射阵元组的上方,相邻两个发射阵元组之间分布有一个接收阵元组,每个发射阵元组包括至少一个发射阵元,每个接收阵元组包括至少一个接收阵元。
[0016]
优选地,所述三维视觉异形平面孔径全息成像安检雷达还包括多源传感器分系统,所述多源传感器分系统与所述工业控制与处理分系统通信连接,所述多源传感器分系统包括温度测量子系统、金属探测子系统和三维点云测量子系统。
[0017]
优选地,所述工业控制与处理分系统包括全系统控制子系统、便携式控制子系统、一键运行子系统和自动感应子系统,通过所述便携式控制子系统、一键运行子系统或自动感应子系统来控制系统运行,所述全系统控制子系统能够进行数据处理,所述便携式控制子系统为移动终端,所述自动感应子系统为探测人进入系统的传感器并能够触发所述多源传感器分系统启动。
[0018]
优选地,所述三维视觉异形平面孔径全息成像安检雷达还包括高速开关网络分系统、中央电子设备分系统、高速数据交换分系统和通信控制分系统,所述高速开关网络分系统与所述分布式天线分系统、所述多子带收发分系统和所述中央电子设备分系统通信连接,所述中央电子设备分系统还与所述多子带收发分系统、所述数据采集与记录分系统和所述高速数据交换分系统通信连接,所述高速数据交换分系统和所述通信控制分系统与所述工业控制与处理分系统通信连接。
[0019]
优选地,所述三维视觉异形平面孔径全息成像安检雷达还包括机械结构分系统、供电保护分系统和监控中心分系统,所述机械结构分系统用于对其他分系统提供机械结构支撑,所述供电保护分系统用于为各分系统提供供电并提供供电保护,所述监控中心分系统与所述工业控制与处理分系统通信连接,所述监控中心分系统用于提供多系统状态和结果的综合显示。
[0020]
本实用新型集合雷达探测、视频监控、人脸识别、人体体温探测、金属探测功能与一体,能够避免多次不同类型安检的过程,简化安检步骤;采用多子带的同时2发2收方式,降低系统获取数据的时间;采用异形平面孔径布局方式,从而使系统获取多方位、多角度数据信息,对提高异物目标检测率具有重要意义;采用模块化组成方式,通过控制和通信的设置,能够根据实际需求灵活增加其它探测模块或传感器,提高了系统的模块化程度,进一步提升整个系统的可扩展性,增强系统的可用性和检测环境适应性。
附图说明:
[0021]
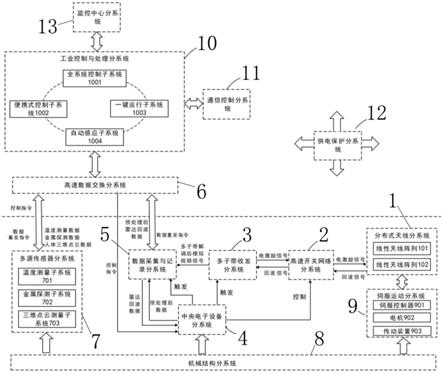
图1为本实用新型所述的三维异形平面孔径全息成像安检雷达的结构示意图;
[0022]
图2为图1中的分布式天线分系统、高速开关网络分系统和伺服运动分系统的局部放大示意图;
[0023]
图3为本实用新型所述的分布式天线分系统的俯视示意图;
[0024]
图4为本实用新型所述的发射阵元和接收阵元的布局方式示意图;
[0025]
图5为图1中的多子带收发分系统、中央电子设备分系统、数据采集与记录分系统、高速数据交换分系统、多源传感器分系统和机械结构分系统的局部放大示意图;
[0026]
图6为图1中的高速数据交换分系统、工业控制与处理分系统、通信控制分系统和监控中心分系统的局部放大示意图;
[0027]
图7为本实用新型所述的第一线性天线阵列的运动范围示意图;
[0028]
图8为本实用新型所述的第二线性天线阵列的运动范围示意图;
[0029]
图9为本实用新型所述的观测目标的三维坐标位置的示意图;
[0030]
图10为本实用新型所述的异形平面孔径与常规平面孔径的对比示意图;
[0031]
图11为本实用新型所述的三维异形平面孔径全息成像安检雷达的控制方法的流程示意图;
[0032]
图12为本实用新型所述的一个实施例的获取雷达探测数据的流程示意图;
[0033]
图13为本实用新型所述的另一个实施例的获取雷达探测数据的流程示意图;
[0034]
图14为本实用新型所述的获取视频监控数据的流程示意图;
[0035]
图15为本实用新型所述的多个摄像机的分布示意图。
具体实施方式:
[0036]
以下结合附图对本实用新型的内容作进一步说明。
[0037]
如图1所示,本实用新型所述的三维异形平面孔径全息成像安检雷达,包括分布式天线分系统1、高速开关网络分系统2、多子带收发分系统3、中央电子设备分系统4、数据采集与记录分系统5、高速数据交换分系统6、多源传感器分系统7、机械结构分系统8、伺服运动分系统9、工业控制与处理分系统10、通信控制分系统11、供电保护分系统12和监控中心分系统13,本实用新型采用模块化组成方式,通过控制和通信的设置,能够根据实际需求灵活增加其它探测模块或传感器,提高了系统的模块化程度,进一步提升整个系统的可扩展性,增强系统的可用性和检测环境适应性。
[0038]
如图2所示,所述分布式天线分系统1包括至少两个独立的线性天线阵列101、102,即第一线性天线阵列101和第二线性天线阵列102,其作用是将多子带收发分系统3产生的电激励信号转化为电磁波,然后将电磁波作为发射信号发射出去并接收人体回波信号,并传送至多子带收发分系统3。
[0039]
如图3所示,第一线性天线阵列101和第二线性天线阵列102对称分布在安检通道100 的两侧,每个线性天线阵列101、102包括三个布局方式一样的稀疏子阵:所述第一线性天线阵列101包括依次连接的第一稀疏子阵a101、第二稀疏子阵a102和第三稀疏子阵a103;所述第二线性天线阵列102包括依次连接的第四稀疏子阵a201、第五稀疏子阵a202和第六稀疏子阵a203;第一稀疏子阵a101、第二稀疏子阵a102、第三稀疏子阵a103与第四稀疏子阵 a201、第五稀疏子阵a202、第六稀疏子阵a203一一对称地分布在安检通道100的两侧;第一稀疏子阵a101和第四稀疏子阵a201的长度相等且为l1,第二稀疏子阵a102和第五稀疏子阵a202的长度相等且为l2,第三稀疏子阵a103和第六稀疏子阵a203的长度相等且为l3;第一稀疏子阵a101、第二稀疏子阵a102和第三稀疏子阵a103中的相邻两个之间的夹角为θ,第四
稀疏子阵a201、第五稀疏子阵a202和第六稀疏子阵a203中的相邻两个之间的夹角为θ,θ的范围为90
°
~180
°
,具体可以举例105
°
、120
°
、135
°
、150
°
等。
[0040]
如图4所示,每个稀疏子阵包括多个发射阵元103和多个接收阵元104,4a、4b、4c分别示出了每个稀疏子阵中的发射阵元103和接收阵元104的三种布局方式;
[0041]
每个稀疏子阵中的相邻两个发射阵元103或相邻两个接收阵元104之间的距离s按照公式(1)计算:
[0042][0043]
式(1)中,c为电磁波传播速度(空气中的电磁波传播速度和真空中的传播速度c近似相等,c=3
×
108m/s),l为稀疏子阵的长度(l=l1、l=l2、l=l3),fmax为系统最大工作频率 (fmax≤1thz),x为稀疏子阵在水平方向上沿平行于所述安检通道100的方向的监测范围;
[0044]
布局方式4a中,每个线性天线阵列101、102中的发射阵元103的数量n
t
等于接收阵元 104的数量n
r
,多个发射阵元103在水平方向上“一”字排列,多个接收阵元104在水平方向上“一”字排列,多个发射阵元103在竖直方向上位于多个接收阵元104的上方,相邻两个发射阵元103或相邻两个接收阵元104之间的距离为s,任一个发射阵元103和相邻的接收阵元104之间在水平方向上的距离为s/2;
[0045]
其中,每个线性天线阵列101、102中的发射阵元103的数量n
t
按照公式计算:
[0046][0047]
每个线性天线阵列101、102中的n
t
个发射阵元103和n
r
个接收阵元104按照第一稀疏子阵a101、第二稀疏子阵a102、第三稀疏子阵a103或第四稀疏子阵a201、第五稀疏子阵a202、第六稀疏子阵a203的顺序进行排列;具体的稀疏子阵用kk表示,kk=1表示第一稀疏子阵a101 或第四稀疏子阵a201,kk=2表示第二稀疏子阵a102或第五稀疏子阵a202,kk=3表示第三稀疏子阵a103或第六稀疏子阵a203,本实用新型以i
nt
表示第n
t
(1<n
t
<n
t
)个发射单元,以 i
nr
表示第n
r
(1<n
r
<n
r
)个接收单元。
[0048]
布局方式4b中,每个稀疏子阵包括多个发射阵元组nt和多个接收阵元组nr,所述发射阵元组nt和接收阵元组nr在水平方向上“一”字排列且交替分布;
[0049]
每个发射阵元组nt包括至少一个在水平方向上“一”字排列的发射阵元103,例如包括三个在水平方向上“一”字排列的发射阵元103;
[0050]
所述发射阵元103的具体数量可以按公式计算:
[0051][0052]
每个接收阵元组nr包括多个在水平方向上“一”字排列的接收阵元104,例如包括五个在水平方向上“一”字排列的接收阵元104。
[0053]
布局方式4c中,每个稀疏子阵包括多个发射阵元组nt和多个接收阵元组nr,多个发射阵元组nt在水平方向上“一”字排列,多个接收阵元组nr在水平方向上“一”字排列,多个接收阵元组nr在竖直方向上位于多个发射阵元组nt的上方,相邻两个发射阵元组nt之间分布有一个接收阵元组nr,每个发射阵元组nt包括三个在水平方向上“一”字排列的发射阵
元103,每个接收阵元组nr包括五个在水平方向上“一”字排列的接收阵元104,相邻的发射阵元组nt和接收阵元组nr中的最靠近的发射阵元103和接收阵元104之间的距离为s。
[0054]
在布局方式4b或4c中,第一稀疏子阵a101和第四稀疏子阵a201分别具有n
ta1
个发射阵元组、n
ra1
个接收阵元组,第二稀疏子阵a102和第五稀疏子阵a202分别具有n
ta2
个发射阵元组、n
ra2
个接收阵元组,第三稀疏子阵a103和第六稀疏子阵a203分别具有n
ta3
个发射阵元组、n
ra3
个接收阵元组;具体的稀疏子阵用kk表示,kk=1表示第一稀疏子阵a101或第四稀疏子阵a201,kk=2表示第二稀疏子阵a102或第五稀疏子阵a202,kk=3表示第三稀疏子阵a103或第六稀疏子阵a203,本实用新型以j
ta
表示第kk个稀疏子阵中第j
ta
个发射阵元组,以j
ra
表示第kk个稀疏子阵中第j
ra
个接收阵元组;每个发射阵元组中共有n
t0
个发射阵元,每个接收阵元组中共有n
r0
个接收阵元,以j
t
表示第j
ta
个发射阵元组中的第j
t
个发射阵元,以j
r
表示第j
ra
个接收阵元组中的第j
r
个接收阵元。
[0055]
在图4中,布局方式4a或4c示出了在竖直方向上,发射阵元103和接收阵元104分布排列成两行,h表示相邻的发射阵元103和接收阵元104的最远端之间的间距,按公式计算:
[0056]
h=2d
e
+d
coup
[0057]
式中,d
e
表示发射阵元103或接收阵元104的高度,d
coup
表示相邻的发射阵元103和接收阵元104的最近端之间的距离,d
coup
∈[λ
c
,6λ
c
],λ
c
表示系统中间工作频率对应的电磁波波长,fmax为系统最大工作频率(fmax≤1thz),fmin为系统最小工作频率 (fmin≥1ghz),c为电磁波传播速度(c=3
×
108m/s)。
[0058]
其中,每个线性天线阵列101、102在机械扫描时上下移动的间隔距离δh按照公式计算:
[0059][0060]
式中,c为电磁波传播速度(c=3
×
108m/s),h为系统监测区域的高度,fmax为系统最大工作频率(fmax≤1thz)。
[0061]
在图1和图2中,所述高速开关网络分系统2与所述分布式天线分系统1、所述多子带收发分系统3和所述中央电子设备分系统4通信连接,其能够在所述中央电子设备分系统4 所设定的开关切换控制逻辑顺序下打开发射通道和接收通道,完成信号发射和信号接收时每个线性天线阵列中具体的发射阵元和接收阵元的选择。
[0062]
如图1和图3所示,所述多子带收发分系统3与所述高速开关网络分系统2、所述中央电子设备分系统4和所述数据采集与记录分系统5通信连接,所述多子带收发分系统3一方面用于产生多子带调频连续波信号,作为所述分布式天线分系统1中天线单元发射电磁波的电激励信号;另一方面用于接收回波信号,并对其进行多子带解调,产生可供所述数据采集与记录分系统5采集和记录的模拟视频信号。
[0063]
如图1和图3所示,所述中央电子设备分系统4与所述高速开关网络分系统2、所述多子带收发分系统3、所述数据采集与记录分系统5和所述高速数据交换分系统6通信连接,所述中央电子设备分系统4一方面用于产生触发所述多子带收发分系统3和所述数据采集与记录分系统5工作的时序触发脉冲;另一方面用于控制所述高速开关网络分系统2在其设定的控制逻辑下完成开关切换;还能够接收所述高速数据交换分系统6的控制指令;除此之
外,还用于对所述数据采集与记录分系统5所记录并缓存的雷达回波数据进行预处理,预处理后的雷达回波数据再返回给所述数据采集与记录分系统5中的缓存器。
[0064]
如图1和图3所示,所述数据采集与记录分系统5与所述多子带收发分系统3、所述中央电子设备分系统4和所述高速数据交换分系统6通信连接,所述数据采集与记录分系统5 用于对所述多子带收发分系统3输出的多子带解调后的模拟视频信号进行模数转换采样和记录,形成雷达回波数据并缓存在其内的缓存器中;所述雷达回波数据还能够传输至所述中央电子设备分系统4中进行预处理,预处理后的雷达回波数据再返回给所述数据采集与记录分系统5中的缓存器,预处理后的雷达回波数据还能够传输至所述高速数据交换分系统6;所述数据采集与记录分系统5和所述高速数据交换分系统6之间还能够传输数据重发指令。
[0065]
如图1、图5和图6所示,所述高速数据交换分系统6与所述数据采集与记录分系统5、所述多源传感器分系统7和所述工业控制与处理分系统10通信连接,所述高速数据交换分系统6用于创建高速路由,实现一部或同时多部所述数据采集与记录分系统5中的预处理后的雷达回波数据和所述多源传感器分系统7产生的温度测量数据、金属探测数据、人体目标三维点云数据传输至所述工业控制与处理分系统10。
[0066]
如图1和图5所示,所述多源传感器分系统7与所述高速数据交换分系统6通信连接,所述多源传感器分系统7包括温度测量子系统701、金属探测子系统702和三维点云测量子系统703等,用于提供温度测量数据、金属探测数据、人体目标三维点云数据等。
[0067]
在图1中,所述机械结构分系统8用于对其他分系统提供机械结构支撑,特别是对所述中央电子设备分系统4、所述多源传感器分系统7和所述伺服运动分系统9提供直接的机械结构支撑。
[0068]
如图1和图2所示,所述伺服运动分系统9与所述分布式天线分系统1连接,用于在所述分布式天线分系统1执行发射信号和接收信号时,承载且驱动所述分布式天线分系统1的结构件依照特定运动方式运动,使所述分布式天线分系统1沿竖直方向运动,从而在空间中形成三维异形平面孔径;所述伺服运动分系统9具体包括伺服控制器901、电机902和传动装置903。
[0069]
如图7和图8所示,所述伺服运动分系统9驱动所述分布式天线分系统1沿竖直方向运动,所述第一线性天线阵列101和所述第二线性天线阵列102在竖直方向上运动的最大距离为l
h
;第一稀疏子阵a101形成平面孔径p
a1
p
b1
p
c1
p
d1
,其尺寸为l
h
×
l1;第二稀疏子阵a102 形成平面孔径p
c1
p
d1
p
e1
p
f1
,其尺寸为l
h
×
l2;第三稀疏子阵a102形成平面孔径p
e1
p
f1
p
g1
p
h1
,其尺寸为l
h
×
l3;第四稀疏子阵a201形成平面孔径p
a2
p
b2
p
c2
p
d2
,其尺寸为l
h
×
l1;第五稀疏子阵a202形成平面孔径p
c2
p
d2
p
e2
p
f2
,其尺寸为l
h
×
l2;第六稀疏子阵a203形成平面孔径p
e2
p
f2
p
g2
p
h2
,其尺寸为l
h
×
l3;通常,l
h
取0.2~3m,l1取0.1~1m,l2取0.1~ 1.2m,l3取0.1~1m;所述平面孔径p
a1
p
b1
p
c1
p
d1
、p
c1
p
d1
p
e1
p
f1
、p
e1
p
f1
p
g1
p
h1
、p
a2
p
b2
p
c2
p
d2
、 p
c2
p
d2
p
e2
p
f2
、p
e2
p
f2
p
g2
p
h2
构成多边形的异形平面孔径,l
h
即为异形平面孔径的高度,所述异形平面孔径在水平方向和竖直方向同时分布,从而实现高度向分辨率和阵列向分辨率,再通过发射一定带宽的信号,还能够实现距离向分辨率,进而实现对观测目标的三维分辨成像。
[0070]
如图9所示,点p
n
(x
n
,y
n
,z
n
)位于观测目标p
n
位于所述异形平面孔径中的三维坐标位置(x
n
,y
n
,z
n
),o为坐标原点,xoy为水平面(z=z
n
)直角坐标系,x轴为阵列向(在水平方向
上沿平行于所述安检通道100的方向),y轴为距离向(在水平方向上沿垂直于所述安检通道100的方向),z轴为高度向(竖直方向);
[0071]
其中,高度向(竖直方向)分辨率ρ
z
:
[0072][0073]
式中,θ
z
为高度向(竖直方向)异形平面孔径的尺寸,r
min
为观测目标到线性天线阵列 101、102的最短距离;
[0074]
阵列向(在水平方向上沿平行于所述安检通道100的方向)分辨率ρ
a
:
[0075][0076]
式中,c为电磁波传播速度(空气中的电磁波传播速度和真空中的传播速度c近似相等,c=3
×
108m/s),r
min
为观测目标到线性天线阵列101、102的最短距离,l
a
为所述异形平面孔径的有效尺寸,由每个稀疏子阵的长度和相邻两个稀疏子阵之间的夹角θ共同确定,x
n
为观测目标的三维坐标位置(x
n
,y
n
,z
n
)在阵列向(在水平方向上沿平行于所述安检通道100的方向)的数值;
[0077]
距离向(在水平方向上沿垂直于所述安检通道100的方向)分辨率ρ
r
:
[0078][0079]
式中,c为电磁波传播速度(空气中的电磁波传播速度和真空中的传播速度c近似相等, c=3
×
108m/s),fmax为系统最大工作频率(fmax≤1thz),fmin为系统最小工作频率(fmin≥ 1ghz)。
[0080]
如图10所示,由于人体表面几何相对较为简单,电磁波信号辐射至人体表面及其附属物后,会因为人体表面的相对平滑,当入射角较大时,其信号反射后难以被接收到;9a示出了采用常规平面孔径(例如平面孔径p
c1
p
d1
p
e1
p
f1
、p
c2
p
d2
p
e2
p
f2
)时的电磁波信号收发示意图,当人体面对平面孔径时,侧面辐射的电磁波信号会被反射到接收天线以外的区域,往往只能看到人体的正面或背面图像,难以观测到人体侧面,人体转向侧面正对平面孔径,则需要增加一次数据采集时间,影响了数据获取效率;9b示出了本实用新型所述的异形平面孔径的电磁波信号收发示意图,所述异形平面孔径能够同时正对人体的正面、侧面和背面进行观测,基于多个平面孔径,无需多次数据获取,且成像过程中,还能利用多角度观测信息,大幅度提升异形平面孔径观测的优势。
[0081]
如图1和图6所示,所述工业控制与处理分系统10与所述高速数据交换分系统6、所述通信控制分系统11和所述监控中心分系统13通信连接,所述工业控制与处理分系统10用于完成雷达回波数据接入、成像处理、图像处理、目标检测、分类识别处理,以及工作模式设置、系统运行、暂停、标校、调试等控制功能,其包括全系统控制子系统1001、便携式控制子系统1002、一键运行子系统1003、自动感应子系统1004;其中,所述全系统控制子系统 1001
用于进行数据处理;所述便携式控制子系统1002可以是移动终端,例如手机、ipad等;所述一键运行子系统1003可以是安放在上设备,类似一键启动按钮,也可以安装在所述监控中心分系统13上;所述自动感应子系统1004是一个可以探测人进入系统的传感器,当人进入时,所述自动感应子系统1004会触发所述多源传感器分系统7启动。
[0082]
如图1和图6所示,所述通信控制分系统11与所述工业控制与处理分系统10通信连接,用于完成所述工业控制与处理分系统10中各子系统的服务器、工作站、便携式终端间图像数据、分类结果数据及其他数据的分发。
[0083]
如图1所示,所述供电保护分系统12用于为各分系统提供供电,并提供过电流、过负荷、电流速断、低电压等供电保护。
[0084]
如图1和图6所示,所述监控中心分系统13与所述工业控制与处理分系统10通信连接,所述监控中心分系统13用于提供多系统状态和结果的综合显示。
[0085]
如图11所示,本申请还提供一种三维异形平面孔径全息成像安检雷达的控制方法,包括以下步骤:
[0086]
步骤s1:系统初始化;
[0087]
所述供电保护分系统12为各分系统提供供电,检测各分系统是否有异常状态,并启动系统进入工作状态;
[0088]
优选地,本实用新型在步骤s1之前还包括步骤s0:设置三维异形平面孔径全息成像安检雷达的基本参数;
[0089]
所述步骤s0具体包括以下步骤:
[0090]
步骤s01:设置每个稀疏子阵中的相邻两个发射阵元103或相邻两个接收阵元104之间的距离s;
[0091]
步骤s02:设置每个线性天线阵列101、102在机械扫描时上下移动的间隔距离δh;
[0092]
步骤s03:设置所述线性天线阵列101的频率矩阵f
101
和所述线性天线阵列102的频率矩阵f
102
;
[0093]
步骤s04:设置多个摄像机的布局;
[0094]
所述步骤s1具体包括以下步骤:
[0095]
步骤s11:系统供电,所述供电保护分系统12为中央电子设备分系统4、数据采集与记录分系统5、高速数据交换分系统6、多源传感器分系统7、伺服运动分系统9、工业控制与处理分系统10、通信控制分系统11、监控中心分系统13供电,各分系统(分布式天线分系统 1、高速开关网络分系统2、多子带收发分系统3、中央电子设备分系统4、数据采集与记录分系统5、高速数据交换分系统6、多源传感器分系统7、伺服运动分系统9、工业控制与处理分系统10、通信控制分系统11、供电保护分系统12和监控中心分系统13)指示灯亮,表示正常;反之,则需要进行维修;
[0096]
步骤s12:启动系统,启动中央电子设备分系统4、数据采集与记录分系统5、高速数据交换分系统6、多源传感器分系统7、伺服运动分系统9、工业控制与处理分系统10、通信控制分系统11、监控中心分系统13进入工作状态;
[0097]
步骤s2:控制系统运行;
[0098]
所述工业控制与处理分系统10通过便携式控制子系统1002、一键运行子系统1003或自动感应子系统1004来控制系统运行;所述自动感应子系统1004是一个可以探测人进入
系统的传感器,当人进入时,所述自动感应子系统1004会触发所述多源传感器分系统7启动;
[0099]
步骤s3:获取雷达探测数据、体温探测数据、金属探测数据和视频监控数据;
[0100]
(一)获取雷达探测数据:通过系统发射和接收电磁波来探测隐藏物品;
[0101]
步骤s31:雷达探测初始化;所述工业控制与处理分系统10启动所述中央电子设备分系统4,进行雷达探测初始化;具体包括:
[0102]
步骤s311:启动所述中央电子设备分系统4;所述工业控制与处理分系统10启动所述中央电子设备分系统4;
[0103]
步骤s312:启动分系统;所述中央电子设备分系统4启动所述分布式天线分系统1、所述高速开关网络分系统2、所述多子带收发分系统3和所述伺服运动分系统9;
[0104]
步骤s313:所述分布式天线分系统1初始化;
[0105]
检测其中一个线性天线阵列是否在最高点、另一个线性天线阵列是否在最低点,例如线性天线阵列101是否在最高点、线性天线阵列102是否在最低点或线性天线阵列101是否在最低点、线性天线阵列102是否在最高点;
[0106]
若其中一个线性天线阵列不在最高点或另一个线性天线阵列不在最低点,则通过所述中央电子设备分系统4控制所述伺服运动分系统9,其伺服控制器901控制所述电机902驱动所述传动装置903,使得所述分布式天线分系统1初始化;
[0107]
步骤s314:雷达测量参数初始化;
[0108]
初始化线性天线阵列;
[0109]
步骤s32:发射信号和接收信号;具体包括以下步骤:
[0110]
步骤s321:发射阵元初始化;
[0111]
初始化发射阵元;
[0112]
步骤s322:开启发射通道;
[0113]
开启所述线性天线阵列101、线性天线阵列102中的发射阵元;
[0114]
步骤s323:开启接收通道;
[0115]
开启所述线性天线阵列101、线性天线阵列102中的接收阵元;
[0116]
步骤s324:发射信号;
[0117]
所述中央电子设备分系统4控制所述多子带收发分系统3产生多子带调频连续波信号(频率矩阵),作为所述分布式天线分系统1中发射阵元发射电磁波的电激励信号;
[0118]
步骤s325:接收信号;
[0119]
所述分布式天线分系统1通过所述接收阵元接收信号(获取发射阵元发射的信号),然后通过匹配滤波器,使所述线性天线阵列101仅接收所述线性天线阵列101的发射阵元发射的信号,所述线性天线阵列102仅接收所述线性天线阵列102的发射阵元发射的信号,所述分布式天线分系统1接收回波信号;
[0120]
步骤s326:雷达回波数据处理;
[0121]
通过所述高速开关网络分系统2将所述分布式天线分系统1产生的回波信号传输至所述多子带收发分系统3,所述多子带收发分系统3将所述回波信号进行解调得到模拟视频信号,并将所述模拟视频信号传输至所述数据采集与记录分系统5,所述模拟视频信号缓存在所述数据采集与记录分系统5中,所述数据采集与记录分系统5对所述模拟视频信号进
行模数转换采样和记录以形成雷达回波数据;所述数据采集与记录分系统5将缓存的所述雷达回波数据传输至所述中央电子设备分系统4进行预处理,最后所述中央电子设备分系统4再将预处理后的所述雷达回波数据传输至所述数据采集与记录分系统5中并存储;
[0122]
步骤s33:接收阵元循环;
[0123]
判断接收阵元是否完成循环,若是则执行步骤s34,若否则返回步骤s323;
[0124]
步骤s34:发射阵元循环;
[0125]
判断发射阵元是否完成循环,若是则执行步骤s35,若否则返回步骤s321或s322;
[0126]
步骤s35:稀疏子阵循环;
[0127]
判断稀疏子阵kk是否大于或等于3,若是则执行步骤s36,若否则返回步骤s321;
[0128]
步骤s36:线性天线阵列循环;
[0129]
判断所述线性天线阵列101是否在最低点或所述线性天线阵列102是否在最高点,若是则表示雷达探测数据采集完成,若否则返回步骤s321,表示雷达探测数据正在采集;
[0130]
根据系统的成像机制(阵元布局和收发方式)不同,可以分为以下两种情况:
[0131]
如图12所示,所述线性天线阵列101、102采用图4中的4a布局方式,步骤s314~s36 具体如下:
[0132]
步骤s314:雷达测量参数初始化;
[0133]
初始化线性天线阵列,即令kk=1,i
nt
=1;
[0134]
步骤s32:发射信号和接收信号;具体包括以下步骤:
[0135]
步骤s321:发射阵元初始化;
[0136]
初始化发射阵元,即令i
nr
=i
nt
;
[0137]
步骤s322:开启发射通道;
[0138]
根据获取的kk、i
nt
参数,开启所述线性天线阵列101、线性天线阵列102中的第kk个稀疏子阵第i
nt
个发射阵元;
[0139]
步骤s323:开启接收通道;
[0140]
根据获取的kk、i
nr
参数,开启所述线性天线阵列101、线性天线阵列102中的第kk个稀疏子阵第i
nr
个接收阵元;
[0141]
步骤s324:发射信号;所述中央电子设备分系统4控制所述多子带收发分系统3产生多子带调频连续波信号(频率矩阵),作为所述分布式天线分系统1中发射阵元发射电磁波的电激励信号;具体包括以下步骤:
[0142]
步骤3241:产生所述线性天线阵列101的频率矩阵;
[0143]
所述中央电子设备分系统4控制所述多子带收发分系统3,产生所述线性天线阵列101 的频率矩阵f
101
,并将所述频率矩阵f
101
通过所述高速开关网络分系统2传输至所述分布式天线分系统1;
[0144]
步骤3242:产生所述线性天线阵列102的频率矩阵;
[0145]
所述中央电子设备分系统4控制所述多子带收发分系统3,产生所述线性天线阵列102 的频率矩阵f
102
,并将所述频率矩阵f
102
通过所述高速开关网络分系统2传输至所述分布式天线分系统1;
[0146]
其中,所述线性天线阵列101的频率矩阵f
101
和所述线性天线阵列102的频率矩阵f
102
按以下步骤设置:
[0147]
步骤s32401:划分频点;
[0148]
具体包括:
[0149]
步骤s324011:设置频点数q,q为正整数;
[0150]
步骤s324012:根据系统最大工作频率fmax(≤1thz)和最小工作频率fmix(≥1ghz),获取系统的频率矩阵f,记为:
[0151]
f=fmin+iδf
[0152]
式中,表示频率间隔,i=1、2、
…
、q,f
i
表示频率矩阵f中的第i个元素;
[0153]
步骤s32402:划分频段;
[0154]
根据系统的频率矩阵f,获取两个子带频率f1、f2,f1、f2表示为:
[0155][0156]
式中,f
mid
表示频率矩阵f中第mid个元素(f1、f2可以互换),此时,存在以下两种情况:
[0157]
(1)若q为偶数,则mid=q/2;
[0158]
(2)若q为奇数,则mid=(q-1)/2或mid=(q+1)/2
[0159]
步骤s32403:设置频率矩阵;
[0160]
具体包括:
[0161]
步骤s324031:设置所述线性天线阵列101的频率矩阵f
101
;
[0162]
根据两个子带频率f1、f2,获取所述线性天线阵列101的频率矩阵f
101
[0163]
f
101
=[<f2>,<f1>]
[0164]
式中,<>表示对矩阵元素顺序进行颠倒,即<f2>=f2(end:-1:1),end表示矩阵中的最后一个元素,<f1>=f1(end:-1:1),
“-
1”表示依次递减;
[0165]
步骤s324032:设置所述线性天线阵列102的频率矩阵f
102
;
[0166]
根据两个子带频率f1、f2,获取所述线性天线阵列102的频率矩阵f
102
[0167]
f
102
=[f1,f2]
[0168]
由于所述线性天线阵列101与所述线性天线阵列102的布局是一样的,因此,所述频率矩阵f
101
与频率矩阵f
102
的子带频率可以互换;
[0169]
步骤3243:发射信号;
[0170]
所述分布式天线分系统1根据获取的频率矩阵,通过所述高速开关网络分系统2开启的发射通道,发射电磁波;
[0171]
步骤s325:接收信号;
[0172]
所述线性天线阵列101仅接收所述线性天线阵列101的发射阵元发射的信号,所述线性天线阵列102仅接收所述线性天线阵列102的发射阵元发射的信号,所述分布式天线分系统 1接收回波信号;
[0173]
步骤s326:雷达回波数据处理;具体包括以下步骤:
[0174]
步骤s3261:将所述回波信号进行解调;
[0175]
通过所述高速开关网络分系统2将所述分布式天线分系统1产生的回波信号传输
至所述多子带收发分系统3,所述多子带收发分系统3将所述回波信号进行解调得到模拟视频信号,并将所述模拟视频信号传输至所述数据采集与记录分系统5,所述模拟视频信号缓存在所述数据采集与记录分系统5中,所述数据采集与记录分系统5对所述模拟视频信号进行模数转换采样和记录以形成雷达回波数据,所述雷达回波数据缓存在所述数据采集与记录分系统5 中;
[0176]
步骤s3262:对所述雷达回波数据进行预处理;
[0177]
所述数据采集与记录分系统5将缓存的所述雷达回波数据传输至所述中央电子设备分系统4进行预处理,最后所述中央电子设备分系统4再将预处理后的所述雷达回波数据传输至所述数据采集与记录分系统5中并存储;
[0178]
所述预处理的方法就是将得到的所述雷达回波数据按照频率从小到大的顺序进行重新排列;
[0179]
步骤s33:接收阵元循环;
[0180]
判断i
nt
是否大于或等于i
nt
+1;
[0181]
若否,则令i
nt
=i
nt
+1,并返回步骤s323;
[0182]
若是,则执行步骤s34;
[0183]
步骤s34:发射阵元循环;
[0184]
判断i
nt
是否大于或等于n
t
;
[0185]
若否,则令i
nt
=i
nt
+1,并返回步骤s321;
[0186]
若是,则执行步骤s35;
[0187]
步骤s35:稀疏子阵循环;
[0188]
判断稀疏子阵kk是否大于或等于n
subarray
,n
subarray
的范围为1~10,通常取n
subarray
=3;
[0189]
若是,则执行步骤s36;
[0190]
若否,则令kk=kk+1,i
nt
=1,并返回步骤s321;
[0191]
步骤s36:线性天线阵列循环;
[0192]
判断所述线性天线阵列101是否在最低点或所述线性天线阵列102是否在最高点;
[0193]
若是,则表示雷达探测数据采集完成,执行步骤s4;
[0194]
若否,则令所述线性天线阵列101下移δh、所述线性天线阵列102上移δh,kk=1,i
nt
=1,并返回步骤s321,表示雷达探测数据正在采集;
[0195]
所述线性天线阵列101、102获取的散射数据s
echo
(f)可表示为:
[0196][0197]
式中,v表示对监测区域的积分范围,f表示频率,t表示电磁波信号(回波信号)传播时间;
[0198]
如图13所示,所述线性天线阵列101、102采用图4中的4b或4c布局方式,步骤s314~ s36具体如下:
[0199]
步骤s314:雷达测量参数初始化;
[0200]
初始化线性天线阵列,即令kk=1,j
t
=1,j
r
=1,j
ta
=1;
[0201]
步骤s32:发射信号和接收信号;具体包括以下步骤:
[0202]
步骤s321:发射阵元初始化;
[0203]
初始化发射阵元,即令j
ra
=j
ta
;
[0204]
步骤s322:开启发射通道;
[0205]
根据获取的kk、j
ta
、j
t
参数,开启所述线性天线阵列101、线性天线阵列102中的第kk 个稀疏子阵第j
ta
个发射阵元组中的第j
t
个发射阵元;
[0206]
步骤s323:开启接收通道;
[0207]
根据获取的kk、j
ra
、j
r
参数,开启所述线性天线阵列101、线性天线阵列102中的第kk 个稀疏子阵第j
ra
个发射阵元组中的第j
r
个接收阵元;
[0208]
步骤s324:发射信号;所述中央电子设备分系统4控制所述多子带收发分系统3产生多子带调频连续波信号(频率矩阵),作为所述分布式天线分系统1中发射阵元发射电磁波的电激励信号;具体包括以下步骤:
[0209]
步骤3241:产生所述线性天线阵列101的频率矩阵;
[0210]
所述中央电子设备分系统4控制所述多子带收发分系统3,产生所述线性天线阵列101 的频率矩阵f
101
,并将所述频率矩阵f
101
通过所述高速开关网络分系统2传输至所述分布式天线分系统1;
[0211]
步骤3242:产生所述线性天线阵列102的频率矩阵;
[0212]
所述中央电子设备分系统4控制所述多子带收发分系统3,产生所述线性天线阵列102 的频率矩阵f
102
,并将所述频率矩阵f
102
通过所述高速开关网络分系统2传输至所述分布式天线分系统1;
[0213]
其中,所述线性天线阵列101的频率矩阵f
101
和所述线性天线阵列102的频率矩阵f
102
按以下步骤设置:
[0214]
步骤s32401:划分频点;
[0215]
具体包括:
[0216]
步骤s324011:设置频点数q,q为正整数;
[0217]
步骤s324012:根据系统最大工作频率fmax(≤1thz)和最小工作频率fmix(≥1ghz),获取系统的频率矩阵f,记为:
[0218]
f=fmin+iδf
[0219]
式中,表示频率间隔,i=1、2、l、q,f
i
表示频率矩阵f中的第i个元素;
[0220]
步骤s32402:划分频段;
[0221]
根据系统的频率矩阵f,获取两个子带频率f1、f2,f1、f2表示为:
[0222][0223]
式中,f
mid
表示频率矩阵f中第mid个元素(f1、f2可以互换),此时,存在以下两种情况:
[0224]
(1)若q为偶数,则mid=q/2;
[0225]
(2)若q为奇数,则mid=(q-1)/2或mid=(q+1)/2
[0226]
步骤s32403:设置频率矩阵;
[0227]
具体包括:
[0228]
步骤s324031:设置所述线性天线阵列101的频率矩阵f
101
;
[0229]
根据两个子带频率f1、f2,获取所述线性天线阵列101的频率矩阵f
101
[0230]
f
101
=[<f2>,<f1>]
[0231]
式中,<>表示对矩阵元素顺序进行颠倒,即<f2>=f2(end:-1:1),end表示矩阵中的最后一个元素,<f1>=f1(end:-1:1),
“-
1”表示依次递减;
[0232]
步骤s324032:设置所述线性天线阵列102的频率矩阵f
102
;
[0233]
根据两个子带频率f1、f2,获取所述线性天线阵列102的频率矩阵f
102
[0234]
f
102
=[f1,f2]
[0235]
由于所述线性天线阵列101与所述线性天线阵列102的布局是一样的,因此,所述频率矩阵f
101
与频率矩阵f
102
的子带频率可以互换;
[0236]
步骤3243:发射信号;
[0237]
所述分布式天线分系统1根据获取的频率矩阵,通过所述高速开关网络分系统2开启的发射通道,发射电磁波;
[0238]
所述线性天线阵列101中发射的信号表示为:
[0239][0240]
所述线性天线阵列102中发射的信号表示为:
[0241][0242]
步骤s325:接收信号;
[0243]
所述线性天线阵列101仅接收所述线性天线阵列101的发射阵元发射的信号,所述线性天线阵列102仅接收所述线性天线阵列102的发射阵元发射的信号,所述分布式天线分系统 1接收回波信号;
[0244]
所述线性天线阵列101接收的回波信号表示为:
[0245][0246]
所述线性天线阵列102接收的回波信号表示为:
[0247][0248]
式中,σ表示目标的复散射系数;
[0249]
步骤s326:雷达回波数据处理;具体包括以下步骤:
[0250]
步骤s3261:将所述回波信号进行解调;
[0251]
通过所述高速开关网络分系统2将所述分布式天线分系统1产生的回波信号 s1(kk,j
t
,j
r
,f
101
)、s2(kk,j
t
,j
r
,f
102
)传输至所述多子带收发分系统3,所述多子带收发分系统3 将所述回波信号s1(kk,j
t
,j
r
,f
101
)、s2(kk,j
t
,j
r
,f
102
)进行解调,得到模拟视频信号 s
10
(kk,j
t
,j
r
,f
101
)、s
20
(kk,j
t
,j
r
,f
102
),并将所述模拟视频信号s
10
(kk,j
t
,j
r
,f
101
)、 s
20
(kk,j
t
,j
r
,f
102
)传输至所述数据采集与记录分系统5,所述数据采集与记录分系统5对所述模拟视频信号s
10
(kk,j
t
,j
r
,f
101
)、s
20
(kk,j
t
,j
r
,f
102
)进行模数转换采样和记录以形成雷达回波数据,所述雷达回波数据缓存在所述数据采集与记录分系统5中;
[0252]
步骤s3262:对所述雷达回波数据进行预处理;
[0253]
所述数据采集与记录分系统5将缓存的所述雷达回波数据传输至所述中央电子设备分系统4进行预处理,最后所述中央电子设备分系统4再将预处理后的所述雷达回波数据传输至所述数据采集与记录分系统5中并存储;
[0254]
所述预处理的方法就是将得到的所述雷达回波数据按照频率从小到大的顺序进行重新排列;
[0255]
所述线性天线阵列101的雷达回波数据处理表示为:
[0256][0257]
所述线性天线阵列102的雷达回波数据处理表示为:
[0258][0259]
式中,t表示转置;
[0260]
步骤s33:接收阵元循环;
[0261]
判断j
r
是否大于或等于n
r0
;
[0262]
若否,则令j
r
=j
r
+1,并返回步骤s323;
[0263]
若是,则进一步判断j
ra
是否大于或等于n
ta-1,n
ta
=n
ta1
、n
ta2
或n
ta3
;
[0264]
若否,则令j
ra
=j
ra
+1,j
r
=1,并返回步骤s323;
[0265]
若是,则执行步骤s34;
[0266]
步骤s34:发射阵元循环;
[0267]
判断j
t
是否大于或等于n
t0
;
[0268]
若否,则令j
t
=j
t
+1,j
r
=1,并返回步骤s322;
[0269]
若是,则进一步判断j
ta
是否大于或等于n
ta
,n
ta
=n
ta1
、n
ta2
或n
ta3
;
[0270]
若否,则令j
ta
=j
ta
+1,j
t
=1,j
r
=1,并返回步骤s321;
[0271]
若是,则执行步骤s35;
[0272]
步骤s35:稀疏子阵循环;
[0273]
判断稀疏子阵kk是否大于或等于n
subarray
,n
subarray
的范围为1~10,通常取n
subarray
=3;
[0274]
若是,则执行步骤s36;
[0275]
若否,则令kk=kk+1,j
ta
=1,j
t
=1,j
r
=1,并返回步骤s321;
[0276]
步骤s36:线性天线阵列循环;
[0277]
判断所述线性天线阵列101是否在最低点或所述线性天线阵列102是否在最高点;
[0278]
若是,则表示雷达探测数据采集完成,执行步骤s4;
[0279]
若否,则令所述线性天线阵列101下移δh、所述线性天线阵列102上移δh,kk=1,j
ta
=1, j
t
=1,j
r
=1,并返回步骤s321,表示雷达探测数据正在采集;
[0280]
所述线性天线阵列101、102获取的散射数据s
echo
(f)可表示为:
[0281][0282]
式中,v表示对监测区域的积分范围,f表示频率,t表示电磁波信号(回波信号)传播时间;
[0283]
(二)获取体温探测数据:通过所述温度测量子系统701测量人体体温,获取人体体
温值 i
c
;具体包括以下步骤:
[0284]
步骤s3201:启动所述温度测量子系统701;所述工业控制与处理分系统10中的便携式控制子系统1002、一键运行子系统1003或自动感应子系统1004启动所述温度测量子系统701;所述温度测量子系统701可以选用人体红外传感器;
[0285]
步骤s3202:体温探测初始化,令i
c
等于0;
[0286]
步骤s3203:体温测量;利用所述温度测量子系统701测量人体体温,获取人体体温值 i
c
;
[0287]
(三)获取金属探测数据:通过所述金属探测子系统702检测是否隐藏金属;具体包括以下步骤:
[0288]
步骤s3301:启动所述金属探测子系统702;所述工业控制与处理分系统10中的便携式控制子系统1002、一键运行子系统1003或自动感应子系统1004启动所述金属探测子系统702;
[0289]
步骤s3302:金属探测初始化,令金属探测测量值i
m
等于0,设定阈值i
m0
;
[0290]
步骤s3303:金属探测;利用所述金属探测子系统702检测是否隐藏金属,获取金属探测测量值i
m
,若i
m
大于或等于阈值i
m0
,则表示存在隐藏金属;若i
m
小于阈值i
m0
,则表示无隐藏金属;
[0291]
(四)获取视频监控数据:通过所述三维点云测量子系统703获取视频监控数据data
all
,并提取出人脸数据data
face
;如图14所示,本实用新型还提供一种三维异形平面孔径全息成像安检雷达光学重建方法,具体包括以下步骤:
[0292]
步骤s3401:三维测量初始化;
[0293]
所述工业控制与处理分系统10中的便携式控制子系统1002、一键运行子系统1003或自动感应子系统1004启动所述三维点云测量子系统703,并初始化所述三维点云测量子系统703 的参数;
[0294]
所述三维点云测量子系统703包括多个摄像机105,所述多个摄像机105“一”字排列地分布在所述线性天线阵列101、102中,所述三维点云测量子系统703通过所述多个摄像机 105来获取人体不同角度的图片,所述多个摄像机105的布局方式如图15所示;
[0295]
相邻两个摄像机105之间的距离为d
u
,d
u
可表示为:
[0296][0297]
式中,f
fcous
表示镜头焦距,ρ
u
表示水平方向上照片重复度,l
u
表示摄像机感光元件的水平长度;
[0298]
d
u
也可以表示为:
[0299][0300]
式中,θ
u
表示摄像机水平观测角度(水平视场角);
[0301]
当l=l2时,d
u
表示第二稀疏子阵a102或第五稀疏子阵a202上的相邻两个摄像机105 之间的距离;当l=l1或l3时,d
u
表示第一稀疏子阵a101、第三稀疏子阵a103、第四稀疏子阵a201或第六稀疏子阵a203上的相邻两个摄像机105之间的距离。
[0302]
其中,l
x
表示第二稀疏子阵a102或第五稀疏子阵a202与所述安检通道100之间的距离,且l
x
为系统参数,l
′
x
表示第一稀疏子阵a101、第三稀疏子阵a103、第四稀疏子阵a201或第六稀疏子阵a203的中间与所述安检通道100之间的距离,l
′
x
按公式计算:
[0303]
l
′
x
=l
x-lsin(θ)
[0304]
式中,l=l1或l3;当l=l2时,θ=π,此时l
′
x
=l
x
;
[0305]
将排布好的所述多个摄像机105按照线性天线阵列101、线性天线阵列102、l1、l2、l3 的顺序,对摄像机105进行标记,共n
c
个摄像机105;
[0306]
对摄像机105进行标记就是把所有的摄像机105进行编号,编号规则为按照所述第一线性天线阵列101、第二线性天线阵列102、l1、l2和l3的顺序进行编号,即a101、a102、a103、 a201、a202、a203的顺序进行编号,也可以按照a101、a102、a103、a203、a202、a201的顺序进行编号。
[0307]
初始化参数i
3d
=1,i
3d
表示第i
3d
次采集人体光学照片,i
3d
<n
3d
;n
3d
可表示为:
[0308][0309]
式中,floor()表示向下取整,h为系统监测区域的高度,δh为线性天线阵列101、102 在机械扫描时上下移动的间隔距离,(d
v
)min表示d
v
的最小值,d
v
可表示为:
[0310][0311]
式中,f
fcous
表示镜头焦距,ρ
v
表示垂直方向上照片重复度,l
v
表示摄像机感光元件的竖直高度(垂直视场角);
[0312]
d
v
也可以表示为:
[0313][0314]
式中,θ
v
表示摄像机垂直观测角度;
[0315]
步骤s3402:获取人体光学照片;
[0316]
所述多个摄像机105采集人体光学照片i
3d
表示第i
3d
次采集的人体光学照片, i
3d
<n
3d
;j
3d
表示第j
3d
个摄像机采集的人体光学照片,j
3d
<n
c
;可表示为:
[0317][0318]
所述三维点云测量子系统703获取的所有人体光学照片,即视频监控数据data
all
可表示为:
[0319][0320]
步骤s3403:判断是否继续拍摄,若继续拍摄,则执行步骤s3402,否则执行步骤s3404;
[0321]
具体地,包括以下步骤:
[0322]
s34031:判断i
3d
是否大于或等于n
3d
,若是则表示数据获取完成,不继续拍摄,执行步骤s3404;若否则表示继续拍摄,执行步骤s34032;
[0323]
s34032:记录摄像机的拍摄次数,令i
3d
=i
3d
+1;
[0324]
s34033:移动所述线性天线阵列101、102执行步骤s3402,移动距离为δh,移动距离δh可表示为:
[0325][0326]
步骤s3404:提取人脸数据data
face
;
[0327]
根据所述三维点云测量子系统703获取的视频监控数据data
all
,选出人脸信息量最大的人体光学照片根据所述人脸信息量最大的人体光学照片所述全系统控制子系统1001提取出人脸数据data
face
;
[0328]
步骤s4:高速数据交换;
[0329]
通过所述高速数据交换分系统6将获得的雷达探测数据、体温探测数据、金属探测数据和视频监控数据传输至所述工业控制与处理分系统10;
[0330]
步骤s5:数据处理;
[0331]
启动所述工业控制与处理分系统10中的所述全系统控制子系统1001进行成像处理、图像融合、隐私处理、人脸识别等数据处理操作;该步骤具体包括:
[0332]
步骤s51:成像处理;
[0333]
利用三维成像方法,例如波数域三维成像算法、bp三维成像算法,所述全系统控制子系统1001将所述雷达探测数据中的完整的散射数据s
echo
(f)进行三维成像处理,获取目标三维散射图i1;
[0334]
步骤s52:图像融合;
[0335]
所述全系统控制子系统1001执行图像融合程序,将所述三维点云测量子系统703获取的人体光学照片与所述目标三维散射图i1融合,获取融合图像i2;
[0336]
步骤s53:隐私处理;
[0337]
所述全系统控制子系统1001执行目标检测程序,检测所述融合图像i2中的危险品区域,并将其隐私区域进行图像处理,获取检测图像i3;
[0338]
步骤s54:人脸识别;
[0339]
将所述全系统控制子系统1001提取出的人脸数据data
face
;通过所述通信控制分系统11 传输至所述监控中心分系统13,所述监控中心分系统13进行识别,具体包括以下步骤:
[0340]
s541:获取人脸数据data
face
;
[0341]
为了避免在安检过程中被测人员的脸部被遮挡,例如有意、无意地用手等物体遮挡脸部,而获取人脸数据data
face
失败,本实用新型优选在所述安检雷达出口设置至少一个人脸识别镜头,当获取人脸数据data
face
失败时,可以在工作人员指导下,利用所述人脸识别镜头进行拍摄,从而获取人脸数据data
face
;
[0342]
s542:对待处理的人脸数据data
face
进行数据增强,得到数据data1;
[0343]
s543:根据所述数据data1,通过训练收敛的无锚点神经网络模型生成待处理的特征向量 data2;
[0344]
通过所述无锚点神经网络模型,可以大为减少神经网络模型提取的预测框的数量,降低模型的计算复杂度,并且使最终预测的检测框具有良好的伸缩性,有助于提升尺度变化较大的物体的识别效果,也能让神经网络模型获得更加充足的语义信息,有利于对图像场景中物体进行检测识别;
[0345]
s544:对所述待处理的人脸数据data
face
的所述特征向量data2进行进项分类和回归,得到处理结果数据data3;
[0346]
s545:获取待处理的人脸数据data
face
的处理结果数据data3;
[0347]
s546:信息查询;
[0348]
通过所述通信控制分系统11将处理结果数据data3与所述监控中心分系统13的资料库数据进行对比,查找获取被测人员信息data4;
[0349]
其中,若不能获取被测人员信息data4,则利用所述安检雷达出口所获取的人脸数据,在工作人员的指导下,对被测人员进行识别和标注;
[0350]
步骤s6:图像显示;
[0351]
将处理后的检测图像i3和被测人员信息date4经过所述通信控制分系统11传输至所述监控中心分系统13进行图像显示;
[0352]
步骤s7:检测是否继续工作,若继续工作,则返回步骤s3,否则结束;
[0353]
在本申请中,系统默认状态是继续工作。
[0354]
以上内容是对本实用新型所述的三维异形平面孔径全息成像安检雷达作出的进一步详细说明,并非对本实用新型的范围进行限定,在不脱离本实用新型构思的前提下,本领域普通技术人员依据本实用新型的技术方案做出的各种变形和改进,均应视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1