一种俯仰机构的低速风洞尾撑模型试验准备方法及装置与流程
[0001]
本发明涉及空气动力学领域,具体涉及到风洞试验中的一种俯仰机构的低速风洞尾撑模型试验准备方法及装置。
背景技术:
[0002]
在传统的低速风洞尾撑模型试验中,天平、支杆及试验模型的安装及测量系统的调试工作均直接在风洞试验段内进行。为了实现调试安装,传统的方法是将风洞的顶部拆除,通过风洞试验段外部的行吊将模型吊入风洞内,然后操作人员进行安装和连接。
[0003]
上述的传统方法面临着几个技术问题和工程问题:首先,因为采用现场吊装,其安装工艺为先进行横支杆和尾支撑的连接,然后进行斜支杆与横支杆的连接,最后连接斜支杆与试验模型内天平的连接。因为试验模型属于大型物体,一般的重量都超过一吨,而天平是设置在试验模型的腹腔内部,天平是属于精密件,在连接过程中,只要有一点角度上的变化都可能导致天平损坏,或者破坏其精准度,因此现场安装的校准工作非常难控制。
[0004]
其次,因为采用现场吊装,安装位置高于地面2m以上,操作人员又必须近距离作业,对于在空中进行一个大质量物件的连接和校准工作,随时会面临试验模型掉落的风险,对于操作人员的人身安全带来风险。
[0005]
最后,随着技术的发展和对试验精度的要求,新建的风洞属于顶部封闭式风洞,不可能将风洞的顶部再进行拆除,而考虑到风洞内部的空间,也不可能将行车装进风洞内,更不可能在风洞内安装类似于导轨之类的结构。
[0006]
因此对于传统的安装校准方法不能满足现有的技术需求,需要设计新的方法。
技术实现要素:
[0007]
本发明的目的是提供一种新的准备方法,使得试验模型在风洞外完成安装和校准后,再整体进入风洞进行与尾支撑连接,同时要避免在安装过程中对于风洞内部表面结构的破坏,避免影响风洞吹风试验的流场。
[0008]
为了实现上述目的,本发明采用如下技术方案:一种俯仰机构的低速风洞尾撑模型试验准备方法,应用于顶部封闭的风洞试验段,包括以下步骤:s1:将试验模型在风洞外的地面上与横支杆、斜支杆进行安装连接为一体,并相互进行校准,将校准后整体的试验模型固定连接到移动机构上;s2:通过喷气在移动机构的底部与地面之间形成一层高速气流层,使得移动机构和整体试验模型浮空,操作人员悬空推动移动机构至升降机;s3:通过升降机将移动机构送至风洞口,通过滚轮机构推动移动机构沿设置在风洞内的导轨移动靠近试验支撑机构处;s4:通过移动机构上的驱动电机和滑块机构,对移动机构上的试验模型位置进行调整,
使得横支杆的连接端相对于尾支撑机构的连接端进行位置的变化,从而实现将横支杆的连接端与尾支撑机构的连接端对齐连接;s5:连接完成后,松开对横支杆的锁紧,移动移动机构离开风洞。
[0009]
一种俯仰机构的低速风洞尾撑模型试验准备装置,移动机构包括:底板,设置在底板上的四个支撑柱,所述支撑柱的底部设置有气垫,设置在底板上的角度调整机构,所述角度调整机构包括第一支撑台和设置在第一支撑台上的第一导轨,连接在第一导轨上的第二支撑台,设置在第二支撑台上的第二导轨,连接在第二导轨上的第三支撑台,所述第二支撑台沿着第一导轨移动,所述第三支撑台沿着第二导轨移动,所述第三支撑台上设置有支杆夹持架,所述支杆夹持架的顶端设置有支杆夹持座,所述底板的对称侧边上设置有滚轮。
[0010]
在上述技术方案中,所述第一导轨的运动方向与第二导轨导轨的运动方向相互不平行,夹持座的夹持轴向与第二导轨的运动方向相互平行。
[0011]
在上述技术方案中,所述支杆夹持架上设置有用于调整支杆的滚转结构,所述滚转结构设置在支杆夹持座上,或者所述滚转结构设置支杆夹持架的底部。
[0012]
在上述技术方案中,当所述滚转结构设置在支杆夹持座上时,所述支杆夹持座包括导轨基座和设置在导轨基座上的弧形导轨,支杆抱箍通过滑块连接座设置在弧形导轨上。
[0013]
在上述技术方案中,当所述滚转结构设置在支杆夹持架底部时,在第二导轨与第三支撑台之间设置有第三导轨,所述第三导轨连接在第二导轨上且沿着第二导轨移动,第三支撑台连接在第三导轨上且沿着第三导轨移动。
[0014]
在上述技术方案中,所述第三支撑台沿第三导轨移动所形成的平面与第一导轨的移动方向相互平行,第三支撑台沿第三导轨移动所形成的旋转轴(中心)与夹持座的夹持轴相互平行共线。
[0015]
在上述技术方案中,包括设置在第一支撑台上输出作用到第二支撑台的电机,设置在第二支撑台上输出作用到第三支撑台的电机。
[0016]
在上述技术方案中,用于对试验模型进行俯撑连接。
[0017]
在上述技术方案中,当对试验模型进行背撑连接时,支杆夹持架上不设置支杆夹持座,所述支杆夹持架包括对称连接在第三支撑台上的第一支撑架和第二支撑架,所述第一支撑架和第二支撑架分别通过铰链结构与第三支撑台连接,所述第三支撑台上设置有两个电动推杆,两个电动推杆的输出端各自连接到第一支撑架和第二支撑架上,所述第一支撑架和第二支撑架的顶部相互远离。
[0018]
综上所述,由于采用了上述技术方案,本发明的有益效果是:本发明改变了传统的进行尾支撑的连接安装方法,通过设计一种移动机构实现对于试验模型在风洞外整体进行校准后再进行风洞内连接;本发明采用的安装方法,可以避免现有技术中在连接过程中对于天平的难以连接和校准的缺陷;
本发明的方法适用于没有开口段的封闭式风洞,在安装连接过程中,支撑机构不会直接接触风洞内壁和底板,不会因为支撑机构给风洞底板带来破坏;本发明的结构简单,可以载人操作,实现模型在不同角度状态下测量系统、支撑系统的调试工作,完成尾撑模型试验前所有安装准备工作。
附图说明
[0019]
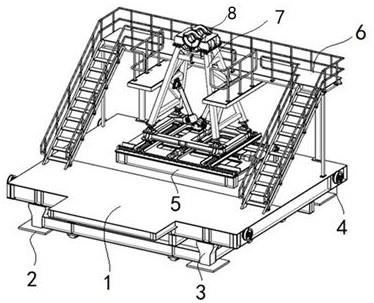
本发明将通过例子并参照附图的方式说明,其中:图1是移动机构的整体结构示意图;图2是角度调整台的结构示意图;图3是角度调整台的结构示意图;图4是支杆抱箍的结构示意图;图5是支杆夹持架的结构示意图;其中:1是底板,2是气垫,3是支撑柱,4是滚轮,5是角度调整机构,5-1是第一支撑台,5-2是第一导轨,5-3是第二导轨,5-4是第二支撑台,5-5是第三支撑台,5-6是第三导轨,5-7是第二滑块,6是梯架,7是支杆夹持架,7-1是第一支撑架,7-2是第二支撑架,7-3是铰链结构,7-4是电动推杆,8是支杆夹持座,8-1是弧形导轨,8-2第一滑块,8-3是支杆抱箍。
具体实施方式
[0020]
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
[0021]
本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
[0022]
如图1 所示,进行俯仰机构尾撑的整体移动结构包括几大部分,用于支撑的底板1,底板1下端的四个角落分别设置有支撑柱3,在支撑柱3的底部设置有气垫2,在底板1上设置有操作人员行走的梯架6,同时在底板1上设置有用于支撑试验模型的支杆夹持架7,在支杆夹持架7与底板1之间设置有用于调整试验模型位置及角度调整机构5。
[0023]
在本实施例中,进行试验前的准备工作均是在风洞外部进行,也就是在风洞外部利用起重设备或者行吊将试验模型连接到支杆夹持架7上,然后将整个移动机构连同试验模型整体移至风洞内,并进行试验模型与支撑机构的连接。本实施例中,之所以采用在风洞外部进行准备的原因是因为本实施例针对的风洞环境是一个顶部封闭的风洞,该风洞无法在风洞外部安装起重设备、或者在风洞内部安装行吊设备来进行试验模型的吊装,因此只能在风洞外进行试验准备工作。考虑到试验模型的整体重量以及移动机构的整体重量和体积,在支撑柱3的底部设置有气垫2,利用风洞本身的供气系统对气垫进行供气,使得气垫2膨胀,给整体的移动机构提供一个向上的浮力。每一个支撑柱3上的气垫2提供的浮力使得移动机构悬空,在悬空状态下,试验操作人员通过推动移动机构即可实现对移动机构的位置移动。移动机构再悬空的状态下移动非常轻松,并且因为不需要提供类似于导轨之类的移动辅助结构,使得整体的移动机构在移动过程中,不会对地面造成额外的损伤,特别是在风洞所处的试验环境。整体的移动机构是在地面上进行安装准备,而实际的风洞试验段是
架设在高空中,因此需要采用升降装置对移动机钩进行转移。因此本实施例中采用气垫2进行支撑并浮空转运,使得整体移动机构非常容易进入到升降装置,在转移过程中不会存在机械结构相互干涉的客观缺陷。
[0024]
在进入风洞后,风洞内设置有用于移动的导轨,而在移动机构的对称两侧分别设置有滚轮4,推动移动机构使得滚轮4与导轨配合,然后排放气垫2内的气体,直接使得移动机构在轨道上滑动,减少当移动机构上的梯架6上站人时增加的重量可能导致气垫的浮力不够,使得移动机构损伤风洞底板。
[0025]
实施例一在本实施例中,如图2所示,角度调整机构5包括设置在底板1上的第一支撑台5-1,第一支撑台5-1上设置有两个第一导轨5-2,在第一导轨5-2上通过滑块连接有第二支撑台5-4,第二支撑台5-4沿着第一导轨5-2的方向进行移动。在第一支撑台上设置有电机,电机通过控制系统控制输出作用力到第二支撑台上,实现通过控制使得第二支撑台5-4沿着第一导轨5-2定量的移动。
[0026]
所述第二支撑台5-4上固定连接有两个第二导轨5-3,在第二导轨5-3上通过滑块连接有第三支撑台5-5,在第二支撑台5-4上设置有电机,通过控制电机做功输出作用到第三支撑台5-5上,使得第三支撑台5-5沿着第二导轨5-3的方向进行移动。
[0027]
在本实施例中,第二导轨5-3与第一导轨5-2在空间内相互不平行,最佳的设置方向为第二导轨5-3与第一导轨5-2在空间上正交设置。
[0028]
在第三支撑台5-5上设置有支杆夹持架7,如图5所示,在支杆夹持架7的顶部固定连接有杆夹持座,如图4所示,杆夹持座包括基座和设置在基座上的弧形导轨8-1,连接在弧形到8-1上的第一滑块8-2,连接第一滑块8-2上的支杆抱箍8-3。支杆抱箍8-3在弧形导轨8-1上滑动即可改变支杆抱箍8-3的轴向相对于弧形导轨的偏转角度。
[0029]
当支杆夹持架7、杆夹持座、角度调整结构为一体时,试验模型的天平支杆固定在支杆抱箍8-3上,通过改变第二支撑台5-4相对于第一支撑台5-1的位置可以调整天平支杆相对与尾支撑连接机构的水平位置,通过改变第三支撑台5-5相对于第二支撑台5-4的位置可以调整天平支杆相对于尾支撑连接机构的前后位置,通过改变支杆抱箍8-3相对于弧形导轨8-1的偏转位置可以调整天平支杆的滚转角度位置。综合的调整可以实现对于试验模型在风洞内的位置调整,满足试验模型上的天平支杆与支撑机构的精准对接。
[0030]
实施例二在实施例一的基础上,在本实施例中,如图3所示,在第三支撑台5-5与第二导轨5-3之间增加设置一组第三导轨5-6,第三导轨5-6通过第二滑块5-7连接到第二导轨5-3上。所示第三导轨5-6为弧形导轨,第三支撑台5-5通过连接滑块在第三导轨5-6上进行滑动,使得第三支撑台5-5整体上沿着第三导轨5-6进行角度的偏转,那么设置在第三支撑台5-5上的支杆夹持架7也跟随转动,从而带动支杆抱箍8-3进行转动。
[0031]
在上述实施例中,第三导轨5-6和弧形导轨8-1可以同时存在,也可以在整个机构中保持一种,只要能实现对于支杆抱箍8-3进行角度上的转动即可。这些结构的设置均是针对尾支撑结构的准备工作。
[0032]
实施例三在实施例二的基础上,当需要进行背撑结构的连接时,在整个机构中就不能设置抱箍
结构,只能采用第三导轨5-6的结构来改变天平支杆的角度转动。支杆夹持架7上不设置支杆夹持座,所述支杆夹持架7包括对称连接在第三支撑台上的第一支撑架7-1和第二支撑架7-2,所述第一支撑架7-1和第二支撑架7-2分别通过铰链结构7-3与第三支撑台5-5连接,所述第三支撑台5-5上设置有两个电动推杆7-4,两个电动推杆7-4的输出端各自连接到第一支撑架7-1和第二支撑架7-2上,通过电机的作用改变第一支撑架7-1和第二支撑架7-2的顶部相互距离。
[0033]
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1