一种基于现场视频的探地雷达辅助定位方法及定位系统与流程
1.本发明涉及一种定位技术,尤其涉及一种基于现场视频的探地雷达辅助定位方法及定位系统。
背景技术:
2.探地雷达是一种利用高频电磁波来确定浅表地层构造的无损地球物理探测技术,它通过空域扫描向探測区域发射电磁波并接收散射回波,根据地下介质的电性差异(电导率和介电常数)来确定地下目标体或层位分布的位置、形态、埋深和几何形态等参数,实现对未知区域内部的成像处理。由于其具有数据采集效率高,分辨率高和无损检测等优点,广泛应用于道路检测、考古、建筑工程等诸多领域。
3.探地雷达数据采集过程中的精确定位是关键。现有技术中,探地雷达探测过程中多采用实时动态差分gps或全站仪来进行精确定位,结合全时录像时间检索获取现场照片进行辅助定位。利用上述方法获取探地雷达位置信息存在以下缺陷:
4.(1)差分gps在市政道路容易受卫星信号接收质量影响,经常被高大建筑物、茂密树木及高架桥等遮挡卫星信号而无法获取准确的定位信息,导致定位偏差几米到几十米;
5.(2)全站仪受可视距离限制无法胜任长距离探测作业的要求;
6.(3)全时录像时间检索技术,是靠连续抓拍照片全时录像,事先需要严格校准雷达采集主机和抓拍摄像机的时间,使得双方时间严格同步。即使如此,仍会有不低于100毫秒左右的时间偏差,在车载探地雷达正常时速(不低于40公里/小时)的情况下,产生米级或以上的照片定位误差;此外,全时录像过程中由于暂停采集(等红灯期间)或者车速过慢时所占用的存储空间及视频文件的传输时间都有很高的消耗。
技术实现要素:
7.为解决现有技术中的通过差分gps、全站仪和全时录像等方法无法全程精确定位的技术问题,本发明提供一种基于现场视频的探地雷达辅助定位方法,还提供一种实现所述定位方法的定位系统,根据探地雷达数据采集的道间距和旋转编码器的精度,建立探地雷达图像道数据与现场抓拍照片之间的精确匹配,探地雷达数据采集过程中位置信息全程精确记录,从而实现亚米级精度的现场照片定位功能。
8.本发明基于现场视频的探地雷达辅助定位方法,包括如下步骤:
9.步骤s1:同步辅助设备触发信号;
10.步骤s2:探地雷达主机开始采集数据,获取每道数据的道号信息;
11.步骤s3:计算机触发摄像设备抓拍,实现摄像设备抓拍与探地雷达道间采集的同步,并记录步骤s2获取的每道数据的道号信息;
12.步骤s4:计算机对抓拍的照片序列进行视频编码并根据道号信息创建索引;
13.步骤s5:计算机对视频进行解码并根据索引检索现场照片,实现现场精准定位。
14.本发明作进一步改进,步骤s1中,所述同步辅助设备为探地雷达与摄像设备共用
的旋转编码器,所述旋转编码器与车轮共轴设置,旋转编码器的触发信号分出两路,一路引入到探地雷达主机,一路引入到计算机,所述计算机控制摄像设备进行抓拍。
15.使用轮式载具后部挂载探地雷达,并在轮式载具的车轮上共轴安装旋转编码器,将摄像机固定在轮式载具尾部顶端,镜头45
°
倾斜角度对准探地雷达后方地面,组成一体化的数据采集系统。
16.本发明作进一步改进,步骤s2中,探地雷达数据采集过程中,利用旋转编码器在行进过程中产生的脉冲上沿或下沿触发探地雷达主机,实现探地雷达的道间采集,获取每道数据的道号信息。
17.本发明作进一步改进,步骤s2和s3中,探地雷达数据采集过程中道号信息的同步获取的方法为:
18.(1)探地雷达采集的数据的垂直剖面图像bscan(d
n
,t
m
),1≤n≤trs,1≤m≤ss,trs为探地雷达图像道数,n为探地雷达图像的第n道,ss为每道数据上的采样点数,m为每道数据上第m个采样点,则探地雷达在水平距离d
n
=n
·
δd,δd为采样的道间距,探地雷达在纵轴上的时间往返信号为t
m
=m
·
δt,δt为采样时间间隔;
19.(2)旋转编码器的精度δr=r/p,其中r为旋转编码器的周长,p为旋转编码器旋转一周的脉冲个数;
20.(3)由于探地雷达道间采集和摄像机抓拍是通过旋转编码器脉冲同步触发,探地雷达主机与计算机接收的脉冲数一致,即n
cam
=trs
·
(δd/δr),n
cam
为摄像机脉冲触发阈值,每收到n
cam
个脉冲后计算机发指令让相机抓拍一次。
21.本发明作进一步改进,步骤s4中,计算机将每张照片记录道号信息作为索引保存至索引文件,索引文件包括抓拍照片的帧号和每道数据的道号,所述帧号为抓拍照片的序列号,数据采集的道号作为关键索引,根据探地雷达数据采集的道间距和旋转编码器的精度,建立探地雷达图像道数据与现场抓拍照片之间的精确匹配。
22.本发明作进一步改进,探地雷达数据采集过程中道号信息的索引建立的方法为:
23.摄像设备在探地雷达采集每道数据时同步抓拍一张照片,道号信息与探地雷达每道数据的位置信息的对应关系为:(index
n
)
cam
=n
·
(δd/δr)=n
·
(d
n
)
gpr
,1≤n≤trs,其中,trs为探地雷达图像道数,n为探地雷达图像的第n道,(index
n
)
cam
为探地雷达采集第n道时同步抓拍的对应照片,δd为探地雷达的采样道间距,δr为旋转编码器的精度,n
·
(δd/δr)为探地雷达采集第n道时收到的脉冲总数,n
·
(d
n
)
gpr
为采集数据第n道的位置信息。
24.本发明还提供一种实现所述基于现场视频的探地雷达辅助定位方法的定位系统,包括用来获取浅表地层的地下介质分布图像的探地雷达和摄像抓拍系统,所述摄像抓拍系统包括计算机和与计算机相连、由计算机控制的摄像设备,所述探地雷达包括探底雷达主机和与探底雷达主机相连的探地雷达天线,所述定位系统还包括同步辅助设备,所述同步辅助设备分别与探地雷达主机和计算机相连,同步向所述探地雷达和计算机发出触发信号,实现摄像设备抓拍与探地雷达道间采集的同步。
25.本发明作进一步改进,所述定位系统设置在所述轮式载具上,所述同步辅助设备为与所述轮式载具的车轮共轴设置的旋转编码器,所述探地雷达设置在轮式载具后部,所述摄像设备固定在轮式载具尾部顶端,镜头45
°
倾斜角度对准探地雷达后方地面。
26.本发明作进一步改进,还包括设置在探地雷达上方的电源和网络交换机,所述网
络交换机分别与计算机和探地雷达相连,实现上网功能,所述探地雷达还包括电子连接单元和通信接口,探地雷达天线通过电子连接单元与探地雷达主机相连,所述旋转编码器通过通信接口分别与探地雷达主机和计算机相连。
27.与现有技术相比,本发明的有益效果是:本发明将探地雷达和现场照片抓拍有机结合实现两个传感器数据的一体化同步采集,数据采集过程中无需人工介入,减少了工作量,大大提高了工作效率。本发明探地雷达数据和相对应位置抓拍照片之间的关联是采用同一脉冲触发探地雷达和抓拍相机,根据探地雷达数据采集的道间距和旋转编码器的精度,建立探地雷达图像道数据与现场抓拍照片之间的精确匹配,从根本上避免了差分gps在市政道路容易受卫星信号接收质量影响的问题及全时录像时间检索技术的弊端,确保了探地雷达图像的全程定位准确度,定位精度可以达到分米级,满足一般地质勘察及现场复测的需要。
附图说明
28.图1为本发明定位系统一实施例结构示意图;
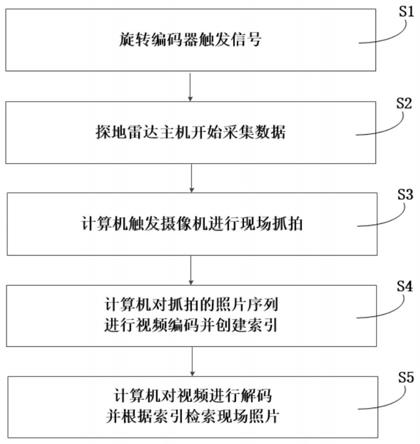
29.图2为本发明定位方法流程示意图。
具体实施方式
30.下面结合附图和实施例对本发明做进一步详细说明。
31.如图1所示,本发明定位系统包括用来获取浅表地层的地下介质分布图像的探地雷达和摄像抓拍系统;所述探地雷达包括探地雷达主机2和探地雷达天线1,探地雷达主机2控制探地雷达数据的采集。探地雷达天线1通过电子连接单元4与探地雷达主机2相连接,电子连接单元4通过串口与探地雷达天线1相连接,电子连接单元4实现探地雷达天线1与探地雷达主机2的数据通信。
32.探地雷达天线1包括发射天线和接收天线。发射天线通过探地雷达主机2控制发射电磁波,接收天线接收发射天线的电磁波,探地雷达天线1通过电磁波实现地下介质图像的采集。
33.摄像抓拍系统包括上位计算机7和网络摄像机8,网络摄像机8与上位计算机7通过网线相连接,电子连接单元4通过通信接口3与上位计算机7相连接。旋转编码器6与通信接口3相连接,通信接口3分别与电子连接单元4和上位计算机7相连接。通信接口3实现旋转编码器6与探地雷达主机2之间的数据通信,同时,通信接口3为串口,其将旋转编码器的触发信号传送至上位计算机7,上位计算机7触发网络摄像机8进行现场抓拍。
34.本例旋转编码器6为高精度旋转编码器,旋转编码器6通过标准ttl电平触发信号实现对探地雷达主机2和上位计算机7的触发,探地雷达主机2和上位计算机7控制的网络摄像机8同时进行数据的采集和现场照片的抓拍,从而实现有效精准的数据采集。电子连接单元4固定在探地雷达天线1的上部,电子连接单元4上方有网络交换机5和电源模块,与电子连接单元4相连接。网络交换机5连接探地雷达主机2和上位计算机7。探地雷达天线1是收发共置的屏蔽天线或多发多收的屏蔽天线阵列,探地雷达天线的中心频率是170mhz、200mhz、450mhz、500mhz、800mhz、1000mhz、1200mhz或1600mhz;探地雷达天线的中心频率越大,体积越小,中心频率越小,体积越大。根据数据采集环境选择探地雷达不同型号的探地雷达天
线。上位计算机7通过指定的通讯协议触发网络摄像机8进行抓拍并保存现场抓拍照片到上位计算机7。
35.本例的摄像设备还可以为智能手机、相机等,本例的旋转编码器也可以采用其他能够精准触发网络摄像机8和探地雷达同步采集信号的触发装置。
36.作为本实用新型的一个实施例,本例使用轮式载具后部挂载探地雷达,并在轮式载具的车轮上共轴安装旋转编码器,将摄像机固定在轮式载具尾部顶端,镜头45
°
倾斜角度对准探地雷达后方地面,组成一体化的数据采集定位系统。当然,与可以设置为其他的采集角度。比如50度、60度等等。
37.所述摄像机抓拍与探地雷达道间采集同步的系统将探地雷达和现场照片抓拍有机结合实现两个传感器数据的一体化同步采集,系统结构简单,实现了探地雷达图像道数据与现场抓拍照片之间的精确匹配,提高了探地雷达数据采集和复测的效率。
38.如图2所示,本例的基于现场视频的探地雷达辅助定位方法,包括如下步骤:
39.步骤s1:旋转编码器触发信号
40.旋转编码器随车轮旋转,并随着旋转输出触发信号。
41.步骤s2:探地雷达主机开始采集数据
42.探地雷达数据采集过程中,利用高精度的旋转编码器在行进过程中产生的脉冲上沿或下沿同时触发上位计算机的串口和探地雷达主机,实现探地雷达数据采集和现场照片抓拍的同步进行。利用探地雷达的旋转编码器的脉冲信号同时触发探地雷达主机和上位计算机。
43.本例旋转编码器是集光机电技术于一体的速度位移传感器。当旋转编码器轴带动光栅盘旋转时,经发光元件发出的光被光栅盘狭缝切割成断续光线,并被接收元件接收产生初始信号。该信号经后继电路处理后,输出脉冲或代码信号。其特点是体积小,重量轻,品种多,功能全,频响高,分辨能力高,力矩小,耗能低,性能稳定,可靠使用寿命长等特点。根据旋转编码器在地面行进的距离触发脉冲,脉冲为标准的ttl电平信号包括上升沿和下降沿。通过rs232串口将旋转编码器的触发信号分出两路,一路引入到探地雷达主机,一路引入到上位计算机,上位机控制摄像机进行抓拍。这样就实现探地雷达数据采集和现场照片抓拍的的同步进行。
44.步骤s3:计算机触发摄像设备抓拍
45.探地雷达数据采集的同时,旋转编码器在行进过程中产生的脉冲信号经过串口通讯被计算机接收,达到脉冲触发阈值后,计算机发指令触发摄像机抓拍,实现摄像机抓拍与探地雷达道间采集的同步,并记录步骤二获取的每道数据的道号信息。
46.探地雷达数据采集过程中道号信息的同步获取的方法为:
47.(1)探地雷达采集的数据的垂直剖面图像bscan(d
n
,t
m
),1≤n≤trs,1≤m≤ss,trs为探地雷达图像道数,n为探地雷达图像的第n道,ss为每道数据上的采样点数,m为每道数据上第m个采样点,则探地雷达在水平距离d
n
=n
·
δd,δd为采样的道间距,探地雷达在纵轴上的时间往返信号为t
m
=m
·
δt,δt为采样时间间隔;
48.(2)旋转编码器的精度δr=r/p,其中r为旋转编码器的周长,p为旋转编码器旋转一周的脉冲个数;
49.(3)由于探地雷达道间采集和摄像机抓拍是通过旋转编码器脉冲同步触发,探地
雷达主机与计算机接收的脉冲数一致,即n
cam
=trs
·
(δd/δr),n
cam
为摄像机脉冲触发阈值,每收到n
cam
个脉冲后计算机发指令让相机抓拍一次。
50.步骤s4:计算机对抓拍的照片序列进行视频编码并创建索引
51.对步骤s3抓拍的每张照片记录道号信息作为索引保存至索引文件,索引文件由抓拍照片的帧号和每道数据的道号构成。照片帧号由四个字节构成,为抓拍照片的序列号。数据采集道号由四个字节构成,作为关键索引。根据探地雷达数据采集的道间距和旋转编码器的精度,建立探地雷达图像道数据与现场抓拍照片之间的精确匹配。
52.探地雷达数据采集过程中道号信息的索引建立的方法为:
53.摄像设备在探地雷达采集每道数据时同步抓拍一张照片,道号信息与探地雷达每道数据的位置信息的对应关系为:(index
n
)
cam
=n
·
(δd/δr)=n
·
(d
n
)
gpr
,1≤n≤trs,其中,trs为探地雷达图像道数,n为探地雷达图像的第n道,(index
n
)
cam
为探地雷达采集第n道时同步抓拍的对应照片,δd为探地雷达的采样道间距,δr为旋转编码器的精度,n
·
(δd/δr)为探地雷达采集第n道时收到的脉冲总数,n
·
(d
n
)
gpr
为采集数据第n道的位置信息。
54.本例中计算机对抓拍的照片序列进行视频编码的方法是:
55.将抓拍的照片序列作为原始视频帧序列,采用具备编码能力的英伟达显卡gpu编码输出为h.264或hevc(h.265)比特流。视频编码的处理方法包括以下6个步骤:
56.(1)初始化编码器;
57.(2)建立编码参数;
58.(3)分配输入/输出缓存区;
59.(4)拷贝视频帧序列到输入缓存区并从输出缓存区读取比特流;
60.(5)释放并清除输入/输出缓存区;
61.(6)关闭编码器会话。
62.步骤s5:计算机对视频进行解码并根据索引检索现场照片
63.对步骤s4经过编码的视频进行解码,还原抓拍照片序列。根据步骤四创建的道号信息关键索引对照片序列进行检索,得到现场抓拍的照片。
64.计算机对视频进行解码的方法是:
65.采用具备解码能力的英伟达显卡gpu,将h.264或hevc(h.265)比特流解码为原始视频帧序列从而还原现场抓拍照片序列。
66.本例视频解码流程同样包括以下6个步骤:
67.(1)创建cuda上下文容器;
68.(2)建立解码器实例;
69.(3)从容器中分离视频流;
70.(4)开始解码视频流;
71.(5)解码完毕后销毁解码器实例;
72.(6)销毁cuda上下文容器。
73.解码后,根据道号信息关键索引对照片序列进行检索,由于本例的网络摄像机的镜头镜头45
°
倾斜设置,造成抓拍照片位置中心与探地雷达天线的中心形成平移矢量,那么本例探地雷达图像第n道数据的实际照片索引信息为:(index
n
)
cam
=(index
n
)
cam
+d
shift
/δd,(index
n
)
cam
为探地雷达采集第n道时同步抓拍的照片,d
shift
为上述平移矢量距离,δd为
采样的道间距,从而能够根据现场照片对路面进行精准定位。
74.本发明通过探地雷达与摄像机共用旋转编码器在数据道间采集同步触发抓拍路面及周边环境照片形成照片序列并压缩为视频,同时嵌入探地雷达数据采集道号信息作为共同索引,根据探地雷达数据采集的道间距和旋转编码器的精度,建立探地雷达图像道数据与现场抓拍照片之间的精确匹配,在复测阶段通过视频解码、检索及提取来实现亚米级精度的现场照片定位功能。
75.以上所述之具体实施方式为本发明的较佳实施方式,并非以此限定本发明的具体实施范围,本发明的范围包括并不限于本具体实施方式,凡依照本发明所作的等效变化均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1