一种基于激光的机场跑道异物识别装置及识别方法与流程
1.本发明涉及光电信息技术领域,特别涉及一种基于激光的机场跑道异物识别装置及识别方法。
背景技术:
2.fod是foreign object debris的缩写,译为可能损伤航空器的某种外来的物质,其种类多样,总体多用来表示为机场跑道异物。探测机场跑道异物(fod)对于机场安全运行来说至关重要,国家民航总局机场司民航局安全技术中心在2009年发布了fod防范手册,提出了fod探测系统的必要性,并指出目前我国机场对fod的监测仍不完善。以往对于机场跑道fod的识别,多数靠人工定时巡视,人眼搜查异物,当机场跑道环境恶劣,尤其在夜间或者能见度较低的情况下很难进行精准的异物检测,可靠性差且耗时耗力。目前对于机场跑道fod的识别,公开号为cn111562576a的中国发明专利提出的一种机场跑道异物检测系统及方法,该专利申请采用雷达扫描及图像处理识别区域fod,但该方法对于微小的异物识别精度低的同时还操作复杂效率低。另有,公告号为cn 208255440 u的中国实用新型专利提出了一种机场跑道fod检测器,其利用搭载在小车上的激光来识别异物,但该种检测器最大的弱点是在检测过程中需要中断交通,无法用于繁忙的机场跑道运输,导致航班次数减少,造成经济损失。因此,提出一种识别精度高,效率高同时对机场交通影响小的毫米级异物识别装置十分必要。
技术实现要素:
3.为达到上述目的,本发明所采用的技术方案是:
4.一种基于激光的机场跑道异物识别装置,包括轨道系统、基座、激光传感器、反射墙、dtu设备以及终端平台,所述轨道系统设置在机场跑道的一侧,所述机场跑道的另一侧设置有反射墙;所述轨道系统平行机场跑道设置,所述轨道系统包括轨道槽、轨道、滑轮小车、动力组件、无线电控制芯片以及北斗系统定位器,所述轨道槽开设在机场跑道侧面,其槽口与所述机场跑道的路面齐平,所述轨道槽的槽底设置轨道,所述轨道上滚动安装有滑轮小车,所述滑轮小车不凸出机场跑道的路面,所述滑轮小车上安装有动力组件、无线电控制芯片以及北斗系统定位器,所述动力组件用于驱动滑轮小车运行,所述动力组件连接无线电控制芯片,所述无线电控制芯片和北斗系统定位器分别无线连接终端平台;所述基座安装在小车上,所述基座上安装激光传感器和dtu设备,所述激光传感器的发射部朝向反射墙,所述激光传感器的发射部略高于机场跑道的路面,所述激光传感器通过dtu设备无线连接终端平台。
5.优选的,所述轨道位于机场跑道的外侧,所述轨道与机场跑道边缘的距离为1
‑
5m。
6.优选的,所述机场跑道的相对两侧均设置有轨道系统和反射墙,所述轨道系统相对反射墙靠近机场跑道。
7.优选的,所述轨道为双轨道结构,所述滑轮小车设置在双轨道结构之间,所述滑轮
小车的滑轮嵌在双轨道结构的导轨槽中,所述双轨道结构的导轨槽相互正对。
8.优选的,所述动力组件为驱动电机。
9.优选的,所述终端平台包括控制终端、北斗系统接受终端和警报模块,所述控制终端分别连接警报模块、北斗系统接受终端、无线电控制芯片和dtu设备。
10.优选的,所述基座上设置有至少两个激光传感器,所有的所述激光传感器沿着基座的高度从下至上依次间隔设置。
11.此外,本发明还提供一种基于激光的机场跑道异物识别方法,该识别方法采用上述的一种基于激光的机场跑道异物识别装置进行识别,识别处理过程如下:
12.步骤一:将滑轮小车安装在轨道上,滑轮小车上的动力组件连接无线电控制芯片,无线电控制芯片以及北斗系统定位器分别无线连接终端平台,接着,将激光传感器安装在基座上,基座固定在滑轮小车顶部,且让激光传感器的发射部面向机场跑道,并略高于机场跑道的路面,并使激光传感器连接dtu设备,dtu设备无线连接终端平台;
13.步骤二:启动动力组件和激光传感器,动力组件驱动滑轮小车沿着轨道行走,激光传感器在随滑轮小车行走的过程扫描机场跑道并通过dtu设备将采集的数据传递给终端平台;
14.步骤三:终端平台通过如下公式判断是否存在异物:式中,d为激光的路径,c为光速3
×
108m/s,
△
t为激光传感器激光从发射到接收的时间;
15.当d=w时,说明机场跑道上无异物,返回步骤二;
16.当d<w或者d=∞时,说明机场跑道上有异物,进入步骤四;其中,w为激光传感器与反射墙之间距离;
17.步骤四:终端平台控制警报模块发出警报,同时控制北斗系统接受终端将北斗系统定位器传递的定位信息进行显示,人工确认并根据定位信息至相应位置处理异物。
18.与现有技术相比,本发明具有以下有益效果:
19.1、本发明提供的异物识别装置及识别方法,通过利用激光传感器发出的激光对机场跑道的路面进行探测识别,并在识别到异物时,通过北斗系统获取异物的位置,通过同一基座上多个激光传感器的设置来获取异物的高度,此外,在识别到异物后还可以发出警报,从而让相关的人员及时进行处理,进而保证机场跑道的安全。
20.2、本发明所涉及的识别装置,相对于以往探测毫米级异物的装置,能在不影响机场交通的前提下准确探测到跑道上微小的异物,提高了探测识别机场跑道毫米级异物的精确性和准确性;同时,本识别装置的轨道系统滑动可控,可在短时间内探测整个机场跑道内毫米级异物,提高了探测效率。
21.3、本发明能够适用于多种机场跑道,且施工方便,结构计算简单,操作便利,具有很高的推广价值。
附图说明
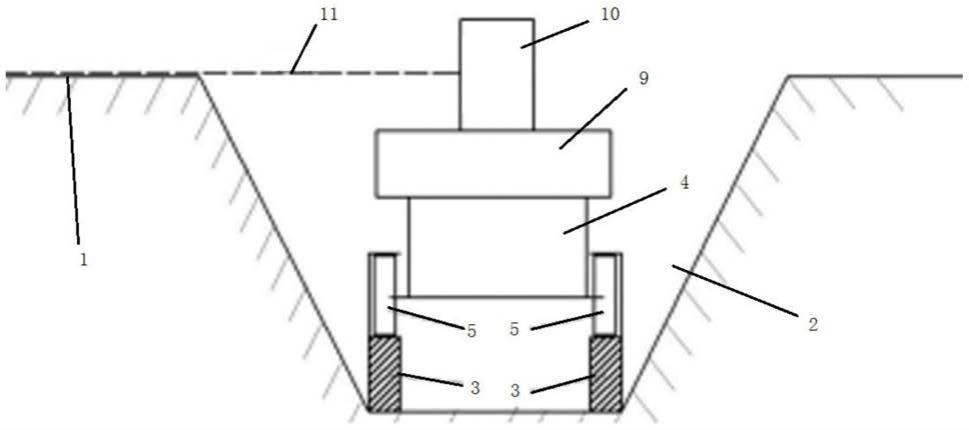
22.图1是本装置的结构示意图。
23.图2是轨道布置图,其中,(a)为轨道布置俯视图,(b)为轨道槽处的剖视图。
24.图3是滑轮小车的结构示意图。
25.图4是机场跑道上有异物和无异物时激光路径的区别,其中,(a)为机场跑道上无异物时激光路径,(b)为机场跑道上有异物时激光路径。
26.图5是图4中1
‑
1剖面图。
27.主要元件符号说明
28.图中:机场跑道1、轨道槽2、轨道3、滑轮小车4、滑轮5、动力组件6、无线电控制芯片7、北斗系统定位器8、基座9、激光传感器10、激光11、反射墙12。
29.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
30.请参阅图1至图3,在本发明的一种较佳实施方式中,一种基于激光的机场跑道异物识别装置,包括轨道3系统、基座9、激光传感器10、反射墙12、dtu设备以及终端平台。所述轨道3系统设置在机场跑道1的一侧,所述机场跑道1的另一侧设置有反射墙12;所述轨道3系统平行机场跑道1设置,所述轨道3系统包括轨道3槽2、轨道3、滑轮小车4、动力组件6、无线电控制芯片7以及北斗系统定位器8,所述轨道3槽2开设在机场跑道1侧面,其槽口与所述机场跑道1的路面齐平,所述轨道3槽2的槽底设置轨道3,所述轨道3上滚动安装有滑轮小车4,所述滑轮小车4不凸出机场跑道1的路面,所述滑轮小车4上安装有动力组件6、无线电控制芯片7以及北斗系统定位器8,所述动力组件6用于驱动滑轮小车4运行,在本实施方式中,所述动力组件6为驱动电机,所述动力组件6连接无线电控制芯片7,所述无线电控制芯片7和北斗系统定位器8分别无线连接终端平台;所述基座9安装在滑轮小车4上,具体通过螺栓将基座9安装在滑轮小车4上,使得基座9可以稳定的固定在轨道3系统上,不因外力脱落,所述基座9上安装激光传感器10和dtu设备,所述激光传感器10的发射部朝向反射墙12,所述激光传感器10的发射部略高于机场跑道1的路面,以便于检测机场跑道1上微小的异物,所述激光传感器10通过dtu设备无线连接终端平台。
31.本发明通过在机场跑道1侧面安装轨道3系统,轨道3系统的滑轮小车4能够在终端平台的远程控制下由动力组件6驱动运行,以带着激光传感器10沿着机场跑道1行走,从而便于激光传感器10对机场跑道1的路面进行探测,激光传感器10通过dtu设备将探测的信息发送至终端平台,进而便于对机场跑道1的路面情况进行监控,具体是利用激光传感器10发出的激光11从发出至接收时间的长短来判断机场跑道1的路面上是否具有异物,利用dtu设备将探测的信息发送至终端平台,利用北斗系统定位器8将滑轮小车4的实时定位发送至终端平台,工作人员通过终端平台获知激光传感器10的探测情况,并且在激光传感器10出异物时及时获知该情况及异物的位置,从而实现对机场跑道1进行监控,方便又准确。
32.进一步的,在本实施方式中,所述轨道3位于机场跑道1的外侧,所述轨道3与机场跑道1边缘的距离为1
‑
5m,以避免轨道3系统设置得太近而干预飞机的正常起飞,进而影响机场交通,同时也避免轨道3系统设置的过远而导致测量精度不高。为了进一步提高测量精度,优选将所述机场跑道1的相对两侧均设置有轨道3系统和反射墙12,所述轨道3系统相对反射墙12靠近机场跑道1,通过双向检测的方式提高测量精度。进一步的,所述轨道3为双轨道3结构,所述滑轮小车4设置在双轨道3结构之间,所述滑轮小车4的滑轮5嵌在双轨道3结构的导轨槽中,所述双轨道3结构的导轨槽相互正对,以提高滑轮小车4滑动时的稳定性,从而保证滑动小车不会因外在荷载作用下脱离轨道3又可保证滑动小车能顺利进行滑动的。
需要说明的是,本发明的轨道3材料应选择合金材料等受温度影响小的材料,避免轨道3因温差大而发生变形,影响滑轮小车4的正常滑动。
33.进一步的,所述终端平台包括控制终端、北斗系统接受终端和警报模块,所述控制终端分别连接警报模块、北斗系统接受终端、无线电控制芯片7和dtu设备,警报模块在控制终端根据dtu设备传递过来的激光传感器10的激光11从发射到接收的时间
△
t进行计算并判定机场跑道1存在异物时发出警报信息,从而便于工作人员及时获知,并能根据北斗系统接受终端接受到北斗系统定位器8传递的定位信息来判断异物出现的位置,进而便于工作人员快速赶到处理机场跑道1内异物,保证飞行不延误。
34.进一步的,在本实施方式中,激光传感器10选取发射激光11半径不小于3mm、测量范围大于100m的远距离激光传感器10,其激光11波长大于1微米,用于对机场跑道1进行毫米级异物识别,并能准确获取异物的高度信息。激光传感器10与基座9用螺栓固定相连,以固定激光传感器10在基座9上,从而保证在识别异物的过程中,激光传感器10不会因风等外在原因发生位置变化,影响识别准确性。而基座9的长宽根据选取的激光传感器10大小确定,只要保证激光传感器10能牢固的固定在基座9上即可,基座9的高度则应越小越好,但为了更好固定激光传感器10,根据基座9固定情况,选取尽可能小的数值即可。为了便于获知异物的高度,本发明在所述基座9上设置有至少两个激光传感器10,所有的所述激光传感器10沿着基座9的高度从下至上依次间隔设置,所有的激光传感器10位于同一竖直平面内,以便于更好的探测异物的高度。
35.此外,本发明还提供一种基于激光的机场跑道异物识别方法,该识别方法采用上述的一种基于激光的机场跑道异物识别装置进行识别,识别处理过程如下:
36.步骤一:将滑轮小车4安装在轨道3上,滑轮小车4上的动力组件6连接无线电控制芯片7,无线电控制芯片7以及北斗系统定位器8分别无线连接终端平台,接着,将激光传感器10安装在基座9上,基座9固定在滑轮小车4顶部,且让激光传感器10的发射部面向机场跑道1,并略高于机场跑道1的路面,并使激光传感器10连接dtu设备,dtu设备无线连接终端平台;
37.步骤二:启动动力组件6和激光传感器10,动力组件6驱动滑轮小车4沿着轨道3行走,激光传感器10在随滑轮小车4行走的过程扫描机场跑道1并通过dtu设备将采集的数据传递给终端平台;
38.步骤三:终端平台通过如下公式判断是否存在异物:式中,d为激光11的路径,c为光速3
×
108m/s,
△
t为激光传感器10激光11从发射到接收的时间;
39.当d=w时,说明机场跑道1上无异物,返回步骤二;
40.当d<w或者d=∞时,说明机场跑道1上有异物,进入步骤四;其中,w为激光传感器10与反射墙12之间距离;
41.步骤四:终端平台控制警报模块发出警报,同时控制北斗系统接受终端将北斗系统定位器8传递的定位信息进行显示,人工确认并根据定位信息至相应位置处理异物。
42.基于上述的识别方法,图4给出了机场跑道1上有异物和无异物时激光11路径的区别,从图4中可知,
43.当d=w时,表明激光传感器10发出的激光11在遇到反射墙12之前,未遇到任何物
体使激光11反射,故此时机场跑道1上无异物。
44.当d<w时,表明激光传感器10发出的激光11在未到反射墙12之前,遇到物体使激光11反射回去,此时机场跑道1上有异物。
45.当d=∞时,则表明激光传感器10发出的激光11在路径上遇到吸光物体(异物),激光11被吸收,没有充足的能量回弹,使
△
t=∞,故d=∞。
46.因此,当d=w时表示机场跑道1上无异物。
47.当d<w或d=∞时表示机场跑道1上有异物。
48.另外,通过在同一基座9的竖直方向上间隔安装多个激光传感器10的方式可以对异物进行高度的判断,判断原理为,终端平台处理多个激光传感器10采集的数据时,从下至上依次计算;当通过计算处于下层的激光传感器10传递的数据显示没有异物时,则说明整体无异物,无需计算其他激光传感器10传递的数据;当通过计算处于下层的激光传感器10传递的数据显示有异物时,方按顺序往上计算,直至某一高度的激光传感器10传递的数据显示没有异物时,停止计算,此时,异物的高度取值落在该激光传感器10的高度值与位于该激光传感器10的下一激光传感器10的高度值之间,如图5所述。
49.在本发明中,所述激光传感器为yag激光器,dtu设备是专门用于将串口数据转换为ip数据或将ip数据转换为串口数据通过无线通信网络进行传送的无线终端设备。
50.上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1