一种三轴校准杆的制作方法
1.本发明涉及汽车检测技术领域,具体涉及一种三轴校准杆。
背景技术:
2.乘用车在进行试验,需要对静止水平停放的车身中心线进行标定,并在中心线上取两点,两点距离0.98m,根据标准0.98米的两点放置gps装置,目前在车辆中心线标定过程中存在测量误差过大的问题,主要体现在由于车身是曲面的,卷尺断面也是曲面的,在测量中卷尺的弹性变形及车身曲面过大都会产生误差;针对此问题,现有技术目前通过激光进行车身中心线的标定,此方法是通过将激光发射器在车顶沿前车牌架中部向后车牌架的中部打出激光,此时打出的激光线即为车身的中心线,此方法可以准确的找到车身中心线,但也由于此方法采用的激光,致使不能沿具有曲面的车顶直接打出激光,并沿打出的激光线画出中心线,目前通过人工利用细杆在车顶找正激光线,当激光线打在细杆的中心线上时,下移细杆至车顶,沿细杆的中心线即可画出车身中心线。但标定过程中不能自动根据激光线找到角度,需按照测出的角度值去人工控制辅助细杆运动,测量误差大的问题。
3.技术方案本发明目的在于解决上述现有技术的不足,从而提供了一种三轴校准杆,可自动调整到水平状态,并可自动旋转寻找激光发射器发射的激光束,自动化程度高。
4.一种三轴校准杆,设置在待标定中心线的车辆顶部,包括气泵吸盘、校准杆本体、及用于控制校准杆本体根据同一水平面的360
°
任意方向发射来的激光进行自动找正的找正装置;所述找正装置包括角度编码盘、找平装置,所述找平装置设置在角度编码盘的输出轴上,找平装置包括x方向找正机构、y方向找正机构和z方向找正机构,y方向找正机构装置在x方向找正机构的x方向调平杆上,z方向找正机构装置在y方向找正机构装置的y方向调平杆上,z方向找正机构的z方向调平杆上设有托盘;角度编码盘设置在气泵吸盘上,角度编码盘输出轴轴线与气泵吸盘中心线平齐;气泵吸盘上装有用于检测气泵吸盘上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器一,姿态传感器一与无线通讯模块一连接,用于将姿态传感器一检测信号发送给控制器,经过处理,控制x方向找正机构、y方向找正机构和z方向找正机构根据x、y、z三轴的角度偏值进行自动找正;过渡连接轴竖直立在托盘上,过渡连接轴的顶端与校准杆本体中部垂直连接,校准杆本体为中空管结构,两端部均装有一用于接收激光的光电接收器一,两个光电接收器一的中心轴与校准杆本体中心轴平齐。
5.所述托盘上装有用于实时检测托盘上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器二,姿态传感器二与无线通讯模块二连接,用于将姿态传感器二检测信号发送给控制器,控制器将姿态传感器二的检测信号与姿态传感器一的检测信号进行比对后得出角度差值,并控制x方向找正机构、y方向找正机构和z方向找正机构根据角度差值进行
差值补偿。
6.x方向找正机构包括固定在角度编码盘输出轴上的支撑托盘,x方向调平杆通过轴承支撑在支撑托盘两侧壁上,且一端穿过支撑托盘的一个侧壁、顶端装有x方向从动齿轮,x方向电机的输出轴上装有x方向主动齿轮,x方向主动齿轮与x方向从动齿轮相啮合;y方向找正机构包括y方向托盘,y方向托盘垂直固定在x方向调平杆上,y方向调平杆通过轴承支撑在y方向托盘两侧壁上,且一端穿过y方向托盘的一个侧壁、顶端装有y方向从动齿轮,y方向电机的输出轴上装有y方向主动齿轮,y方向主动齿轮与y方向从动齿轮相啮合;z方向找正机构包括z方向托盘,z方向托盘垂直固定在y方向调平杆上,z方向调平杆通过轴承支撑在z方向托盘两侧壁上,且一端穿过z方向托盘的一个侧壁、顶端装有z方向从动齿轮,z方向电机的输出轴上装有z方向主动齿轮,z方向主动齿轮与z方向从动齿轮相啮合。
7.支撑托盘、y方向托盘、z方向托盘上分别装有x方向无线信号接收器、y方向无线信号接收器、z方向无线信号接收器。
8.找正装置外部找有防护罩,防护罩上端中部开有让位通孔。
9.所述气泵吸盘两端分别设有一把手,气泵吸盘上设有吸盘进气按钮及吸盘排气阀。
10.所述校准杆本体沿径向并排装有光电接收器二及激光发射器,光电接收器二位于校准杆本体中心,且与过渡连接轴垂直。
11.与现有技术相比本发明:1、通过两个高精度姿态传感器形成的测量闭环,保证校准杆本体始终处于水平状态,提高测量精度。
12.2、测量过程不需要人工移动设备,可自动调整到水平状态,本发明可自动旋转寻找激光发射器发射的激光束,自动化程度高。
13.3、本发明体积小巧,安装方便,测量精度高,对于大型车辆中心线中线标定困难的问题提供了解决方案。
附图说明
14.图1为本发明装配后的效果图;图2为本发明的爆炸图;图3为找正装置局部放大图;图中:1100、气泵吸盘,1101、把手,1102、吸盘进气按钮,1103、吸盘排气阀,1104、防护罩,1105、电池,1106、姿态传感器一,1107、角度编码盘,1108、支撑托盘,1109、x方向调平杆,1110、x方向从动齿轮,1111、x方向主动齿轮,1112、x方向电机,1113、x方向无线信号接收器,1114、y方向托盘,1115、y方向调平杆,1116、y方向从动齿轮,1117、y方向主动齿轮,1118、y方向电机,1119、y方向无线信号接收器,1120、z方向托盘,1121、z方向调平杆,1122、z方向从动齿轮,1123、z方向主动齿轮,1124、z方向电机,1125、z方向无线信号接收器,1126、托盘,1127、过渡连接轴,1128、姿态传感器二,1129、无线通讯模块一,1130、校准杆本体,1131、光电接收器一,1132、支撑架,1133、激光发射器;1134、光电接收器二,1135、无线
通讯模块二。
具体实施方式
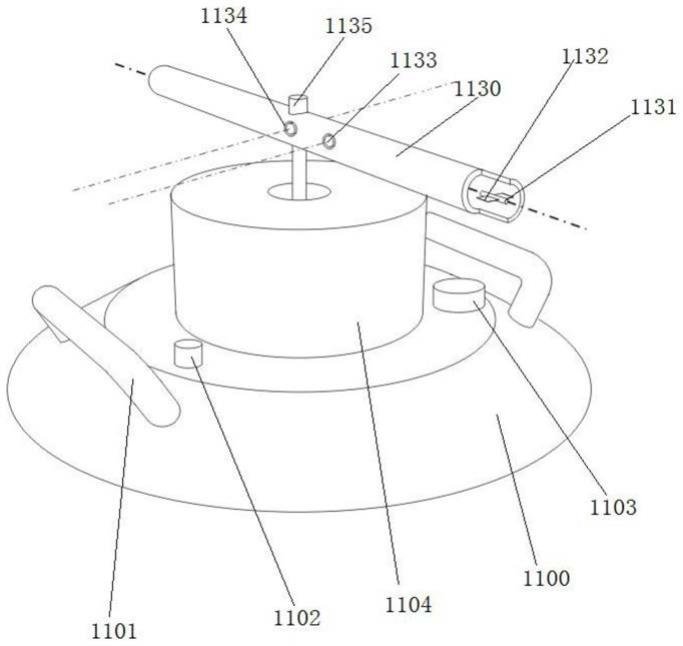
15.如图1、图2所示,本发明包括气泵吸盘1100、校准杆本体1130、及用于控制校准杆本体根据同一水平面的360
°
任意方向发射来的激光进行自动找正的找正装置;气泵吸盘1100两端分别设有一把手1101,气泵吸盘1100上的吸盘排气阀1103够排出气泵吸盘1100内的气体,形成气泵吸盘1100吸附车身的压力差,确保使用时气泵吸盘1100固定在车身上,吸盘进气按钮1102的作用是让空气进入气泵吸盘1100,使气泵吸盘1100内外压力一致,此时吸盘1脱离车身;气泵吸盘1100装有电池1105,用于给角度编码盘1107、x方向电机1112、y方向电机1118、z方向电机1124姿态传感器一1106、姿态传感器二1128、无线通讯模块一1129、无线通讯模块二1135等提供工作电源。找正装置外部找有防护罩1104,防护罩上端中部开有让位通孔,防护罩1104起到保护内部的各部件的作用,找正装置包括角度编码盘1107、找平装置,找平装置设置在角度编码盘1107的输出轴上,找平装置包括x方向找正机构、y方向找正机构和z方向找正机构,y方向找正机构装置在x方向找正机构的x方向调平杆1109上,z方向找正机构装置在y方向找正机构装置的y方向调平杆1115上,z方向找正机构的z方向调平杆1121上设有托盘1126;过渡连接轴1127竖直立在托盘1126上,过渡连接轴1127的顶端与校准杆本体1130中部垂直连接,校准杆本体1130为中空管结构,两端部均通过支撑架1132连接有一个用于接收激光的光电接收器一1131,两个光电接收器一1131的中心轴与校准杆本体1130中心轴平齐;角度编码盘1107设置在气泵吸盘1100上,角度编码盘1107输出轴轴线与气泵吸盘1100中心线平齐;气泵吸盘1100上装有用于检测气泵吸盘1100上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器一1106,姿态传感器一1106与无线通讯模块一1129连接,用于将姿态传感器一1106检测信号发送给控制器,控制器为西门子s7-300plc或单片机stc89c52,经过处理,控制x方向找正机构、y方向找正机构和z方向找正机构根据x、y、z三轴的角度偏值进行自动找正。
16.图3中,x方向找正机构包括固定在角度编码盘1107输出轴上的支撑托盘1108,x方向调平杆1109通过轴承支撑在支撑托盘1108的两侧壁上,x方向调平杆1109一端穿过支撑托盘1108的一个侧壁、顶端装有x方向从动齿轮1110,x方向电机1112的输出轴上装有x方向主动齿轮1111,x方向主动齿轮1111与x方向从动齿轮1110相啮合,电机的转速太快,通过齿轮的减速把速度降下来,这样就能很方便的调平;y方向找正机构包括y方向托盘1114,y方向托盘1114垂直固定在x方向调平杆1109上,y方向调平杆1115通过轴承支撑在y方向托盘1114的两侧壁上,y方向调平杆1115一端穿过y方向托盘1114的一个侧壁、顶端装有y方向从动齿轮1116,y方向电机1118的输出轴上装有y方向主动齿轮1117,y方向主动齿轮1117与y方向从动齿轮1116相啮合;z方向找正机构包括z方向托盘1120,z方向托盘1120垂直固定在y方向调平杆1115上,z方向调平杆1121通过轴承支撑在z方向托盘1120的两侧壁上,z方向调平杆1121一端穿过z方向托盘1120的一个侧壁、顶端装有z方向从动齿轮1122,z方向电机1124的输出轴上装有z方向主动齿轮1123,z方向主动齿轮1123与z方向从动齿轮1122相啮合。支撑托盘1108、y方向托盘1114、z方向托盘1120上分别装有x方向无线信号接收器(型号tak-lora-01)1113、y方向无线信号接收器(型号tak-lora-01)1119、z方向无线信号接收器
(型号tak-lora-01)1125。x方向无线信号接收器1113接收来自姿态传感器一1106发射的x方向角度的信号,并把x方向角度信号传送给x方向电机1112,并通过x方向主动齿轮1111和x方向从动齿轮1110的啮合传动,使x方向调平杆1109上的y方向托盘1114托板处于水平状态;y方向无线信号接收器1119接收来自姿态传感器一1106发射的y方向角度的信号,并把y方向角度信号传送给y方向电机1118,并通过y方向主动齿轮1117和y方向从动齿轮1116的啮合传动,使y方向调平杆1115上的z方向托盘1120托板处于水平状态;同理,z方向无线信号接收器1125接收来自姿态传感器一1106发射的z方向角度的信号,并把z方向角度信号传送给z方向电机1124,并通过z方向主动齿轮1123和z方向从动齿轮1122的啮合传动,使z方向调平杆1121上的托盘1126托板处于水平状态,进而使过渡连接轴1127处于竖直状态。
17.托盘1126上装有用于实时检测托盘1126上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器二1128,姿态传感器二1128与无线通讯模块二1135连接,用于将姿态传感器二1128检测信号发送给控制器,控制器将姿态传感器二1128的检测信号与姿态传感器一1106的检测信号进行比对后得出角度差值,并控制x方向找正机构、y方向找正机构和z方向找正机构根据角度差值进行差值补偿。姿态传感器二1128与姿态传感器一1106形成一个测量的闭环,姿态传感器二1128的信号不断修正姿态传感器一1106的角度差值;确保过渡连接轴1127处于垂直状态;姿态传感器二1128放置在闭环的末端,测量的数据更加准确,姿态传感器一1106放置在闭环前端,其测量数据反馈给执行部分,由于机构存在累积误差,导致托盘1126上的过渡连接轴1127角度有较大误差,通过闭环前后端比对,能够提升测量精度。
18.校准杆本体1130沿径向并排装有光电接收器二1134及激光发射器1133,光电接收器二1134位于校准杆本体1130中心,且与过渡连接轴1127垂直。
19.使用时,仅需要将本装置吸附于车顶,本装置会自动调整到水平状态,校准杆本体旋转寻找激光发射器发射的激光束,完成标定;自动化程度高,精度高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1