带剩余寿命诊断装置的制作方法
1.本发明涉及带剩余寿命诊断装置,详细地说,涉及对由发动机驱动的带的剩余寿命进行诊断的带剩余寿命诊断装置。
背景技术:
2.以往,作为这种带剩余寿命诊断装置,提出有对带(多楔带)的寿命进行诊断的装置(例如参照日本特开2010-54403)。带是将压缩橡胶层、粘接橡胶层和包胶帆布层叠而构成的。压缩橡胶层压接于带轮等动力传递部件。粘接橡胶层与压缩橡胶层相接。包胶帆布与粘接橡胶层相接。在该装置中,根据带的有限要素模型和使用条件,采用弹性解析程序来推定在粘接橡胶层产生的应变量,并基于推定的应变量来诊断带的剩余寿命。
技术实现要素:
3.但是,在上述的带剩余寿命诊断装置中,由于利用采用弹性解析程序而推定的应变量,所以,有时推定的应变量与实际的应变量的误差变大。若推定的应变量与实际的应变量的误差变大,则无法高精度地诊断带的剩余寿命。
4.本发明的带剩余寿命诊断装置的主要目的在于高精度地诊断带的剩余寿命。
5.本发明的带剩余寿命诊断装置为了达成上述的主要目的而采用以下的手段。
6.本发明的带剩余寿命诊断装置的要旨在于,是对由发动机驱动的带的剩余寿命进行诊断的带剩余寿命诊断装置,基于由所述发动机的转速和所述发动机的负荷率或燃料喷射率构成的运转点的频率分布,来诊断所述带的所述剩余寿命。
7.在本发明的带剩余寿命诊断装置中,基于由发动机的转速和发动机的负荷率或燃料喷射率构成的运转点的频率分布,来诊断带的剩余寿命。结果,与利用采用弹性解析程序而推定的应变量的装置相比,能够高精度地诊断带的剩余寿命。
8.在这样的本发明的带剩余寿命诊断装置中,可以基于所述频率分布和按所述带的各劣化程度而确定的多个判定用映射来设定所述带的所述劣化程度,并基于设定的所述劣化程度来诊断所述剩余寿命。这样一来,能够更恰当地诊断带的剩余寿命。
9.在此情况下,可以是在多个所述判定用频率分布中,所述劣化程度高的所述判定用频率分布与所述劣化程度低的所述判定用频率分布相比,在所述带产生共振的所述发动机的运转区域即共振区域内的所述运转点的频率高;也可以是在多个所述判定用频率分布中,所述劣化程度高的所述判定用频率分布与所述劣化程度低的所述判定用频率分布相比,所述发动机怠速运转时的怠速运转点的频率高。这样一来,能够更恰当地设定多个判定用频率分布,能够更高精度地诊断带的剩余寿命。
10.另外,在本发明的带剩余寿命诊断装置中,可以是在所述频率分布中,在所述运转点处于在所述带产生共振的共振区域内的频率高时,与频率低时相比,将所述剩余寿命诊断得短。这样一来,能够更恰当地诊断带的剩余寿命。
11.而且,在本发明的带剩余寿命诊断装置中,可以是在所述频率分布中,在所述运转
点成为所述发动机怠速运转时的怠速运转点的频率高时,与频率低时相比,将所述剩余寿命诊断得短。这样一来,能够更恰当地诊断带的剩余寿命。
附图说明
12.以下,将参照附图对本发明的示例性的实施例的特征、优点以及技术和产业的意义进行描述,其中,用相似的标号表示相似的要素。
13.图1是表示具有作为本发明的一个实施例的带剩余寿命诊断装置的车辆诊断系统1的构成的概略的构成图。
14.图2是表示机动车10的构成的概略的构成图。
15.图3是表示多楔带bv的构成的概略的构成图。
16.图4是表示由机动车10的ecu70执行的映射制作例程的一个例子的流程图。
17.图5是表示频率映射map的一个例子的说明图。
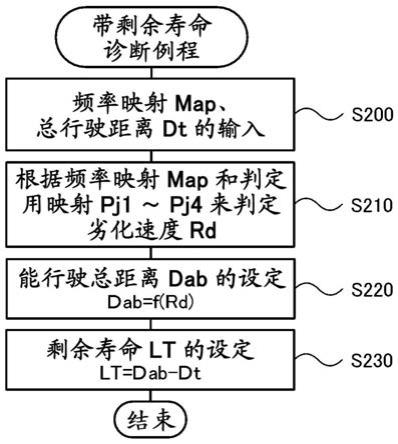
18.图6是表示由管理中心90的计算机92执行的带剩余寿命诊断例程的一个例子的流程图。
19.图7是表示多楔带bv的劣化快时的判定用映射pj1的一个例子的说明图。
20.图8是表示多楔带bv的劣化慢时的判定用映射pj2的一个例子的说明图。
21.图9是表示多楔带bv的劣化比判定用映射pj2快且比判定用映射pj1慢时的判定用映射pj3的一个例子的说明图。
22.图10是表示多楔带bv的劣化比判定用映射pj2快且比判定用映射pj1慢时的判定用映射pj4的一个例子的说明图。
具体实施方式
23.接着,采用实施例,对用于实施本发明的方式进行说明。
24.图1是表示具有作为本发明的一个实施例的带剩余寿命诊断装置的车辆诊断系统1的构成的概略的构成图。图2是表示机动车10的构成的概略的构成图。图3是表示多楔带(v-ribbed belt)bv的构成的概略的构成图。车辆诊断系统1具有机动车10和管理中心90。
25.机动车10具有发动机12、变速器50和进行车辆整体的控制的电子控制单元(以下,称为“ecu”)70。
26.发动机12构成为采用汽油、柴油(轻油)等燃料来输出动力的内燃机。该发动机12将由空气滤清器22清洁了的空气吸入进气管23并使之通过节气门24,并且在进气管23的比节气门24靠下游侧从燃料喷射阀26喷射燃料,使空气和燃料混合。然后,将该混合气经由进气门28而吸入燃烧室29,通过火花塞30的电火花而使之爆发燃烧。然后,将被爆发燃烧的能量而压下的活塞32的往复运动转换成曲轴14的旋转运动。从燃烧室29经由排气门33向排气管34排出的排气经由具有催化剂(三元催化剂)的净化装置35、36而向外气排出,该催化剂对一氧化碳(co)、碳氢化合物(hc,烃)、氮氧化物(nox)这样有害成分进行净化。
27.曲轴14在顶端安装有曲轴带轮pc。曲轴带轮pc在外周安装有多楔带bv。多楔带bv安装有驱动发动机12的未图示的辅机类(冷却系的水泵、交流发电机等)的带轮p1~p5,由曲轴14、即发动机12驱动。来自发动机12的动力经由曲轴14、曲轴带轮pc、多楔带bv、带轮p1~p5而向发动机12的辅机类传递。
28.发动机12、多楔带bv、曲轴带轮pc、发动机12的辅机类和带轮p1~p5收容于对发动机12进行收纳的未图示的发动机室内。
29.变速器50与发动机12的曲轴14相连并经由差动齿轮52而与驱动轮54a、54b相连。
30.ecu70构成为以cpu为中心的微处理器,除了cpu之外,还具有存储处理程序的rom、暂时存储数据的ram、非易失性地存储数据的非易失性存储器72、输入输出端口。
31.来自各种传感器的信号经由输入端口而输入ecu70。作为输入ecu70的信号,例如能够举出来自检测发动机12的曲轴14的旋转位置的曲轴位置传感器14a的曲轴角θcr、来自检测发动机12的冷却水的温度的水温传感器15的冷却水温tw。还能够举出来自检测节气门24的位置的节气门位置传感器24a的节气门开度th、来自对开关进气门28的进气凸轮轴和开关排气门33的排气凸轮轴的旋转位置进行检测的凸轮位置传感器16的凸轮角θci、θco。还能够举出来自安装于进气管23的空气流量计23a的吸入空气量qa、来自安装于进气管23的温度传感器23b的进气温度ta、来自在排气管34的比净化装置35靠上游侧安装的空燃比传感器37的空燃比af、来自在排气管34的净化装置35与净化装置36之间安装的氧传感器38的氧信号o2。还能够举出来自点火开关80的点火信号ig、来自检测变速杆81的操作位置的变速位置(变速杆位置)传感器82的变速位置sp。还能够举出来自检测加速踏板83的踏入量的加速踏板位置传感器84的加速开度acc、来自检测制动踏板85的踏入量的制动踏板位置传感器86的制动踏板位置bp、来自累计从车辆出厂起的行驶距离的里程表87的总行驶距离dt、来自车速传感器88的车速v。
32.各种控制信号从ecu70经由输出端口而输出。作为从ecu70输出的信号,能够举出例如向调节节气门24的位置的节气门电机24b的控制信号、向燃料喷射阀26的控制信号、向火花塞30的控制信号。另外,还能够举出向变速器50的控制信号。
33.ecu70基于来自曲轴位置传感器14a的曲轴角θcr来运算发动机12的转速ne。另外,ecu70基于来自空气流量计23a的吸入空气量qa和发动机12的转速ne来运算负荷率(在发动机12的1个循环中实际吸入的空气的容积相对于每1个循环的行程容积的比例)kl。
34.ecu70通过经由专用通信装置(dcm)89而与管理中心90通信来交换各种数据。
35.在机动车10,ecu70基于加速开度acc、车速v来设定变速器50的目标变速档gs*,并将变速器50控制成使得变速器50的变速档gs成为目标变速档gs*。另外,基于加速开度acc、车速v、变速器50的变速档gs来设定发动机12的目标转矩te*,基于设定的目标转矩te*来进行控制节气门24的开度的吸入空气量控制、控制来自燃料喷射阀26的燃料喷射量的燃料喷射控制、控制火花塞30的点火正时的点火控制等。
36.管理中心90具有作为管理服务器的计算机92、存储装置94和通信装置96。计算机92除了cpu之外,还具有存储处理程序的rom、暂时存储数据的ram、输入输出端口、通信端口等。存储装置94例如构成为硬盘、ssd等。通信装置96进行与机动车10的dcm89的通信。计算机92、存储装置94和通信装置96相互经由信号线而连接。
37.接着,对具有这样构成的实施例的带剩余寿命诊断装置的车辆诊断系统1的动作、尤其是诊断多楔带bv的剩余寿命时的动作进行说明。图4是表示由机动车10的ecu70执行的映射制作例程的一个例子的流程图。映射制作例程从机动车10的使用开始时(例如机动车10从工厂到出厂并起动了系统时、用户购入机动车10并首次起动了系统时等)反复执行。
38.若执行映射制作例程,则ecu70的cpu执行输入发动机12的转速ne和负荷率kl并将
其保存于非易失性存储器72的处理(步骤s100)。然后,判定从开始映射制作例程的执行起的行驶距离d是否超过预定距离dref(步骤s110)。预定距离dref是用于判定是否对多楔带bv的剩余寿命进行诊断的阈值,例如能够举出作为一般的机动车1个月的行驶距离的平均值而被预先确定的值(1000km、1500km、2000km等)。
39.在行驶距离d为预定距离dref以下时,返回步骤s100,并反复步骤s100、s110直到行驶距离d超过预定距离dref为止。因此,ecu70不擦除在步骤s100中输入的发动机12的转速ne、负荷率kl而是将其储备于非易失性存储器72直到行驶距离d超过预定距离dref为止。
40.在步骤s110中行驶距离d超过了预定距离dref时,采用存储于非易失性存储器72的发动机12的转速ne、负荷率kl来制作频率映射map并将其发送到管理中心90(步骤s120)。频率映射map是在机动车10行驶预定距离dref的期间由发动机12的转速ne和负荷率kl构成的运转点po的频率分布。
41.频率映射map用以下的方法来制作。首先,按各预定转速dn(例如按200rpm、400rpm、600rpm等)、按各预定率dkl(例如4%、5%、6%等),将作为在发动机12的运转中发动机12能取得的转速ne的范围而被预先确定的范围rne和作为负荷率kl的范围而被确定的范围rkl划分为多个运转区域ao。然后,根据保存于非易失性存储器72的转速ne、负荷率kl的数据,导出各运转区域ao所含的运转点po(转速ne和负荷率kl)下的发动机12的运转频率(运转次数)feo,从而制作频率映射map。图5是表示频率映射map的一个例子的说明图。在频率映射map中,运转频率feo高的运转区域ao表示为比运转频率feo低的运转区域ao浓(颜色深)。
42.若这样制作频率映射map并将其发送到管理中心90,则擦除存储于非易失性存储器72的发动机12的转速ne、负荷率kl的数据(步骤s130)、将行驶距离d重置为值0(步骤s140),结束映射制作例程。
43.由于反复执行图4的映射制作例程,所以,每当机动车10行驶预定距离dref,就制作频率映射map并将其发送到管理中心90,擦除存储于非易失性存储器72的发动机12的转速ne、负荷率kl的数据。因此,与每行驶预定距离dref却不擦除发动机12的转速ne、负荷率kl的数据而是加以保持的相比,能够实现非易失性存储器72的存储容量的降低。
44.经由通信装置96而接收了频率映射map的管理中心90的计算机92执行以下的处理。图6是表示由管理中心90的计算机92执行的带剩余寿命诊断例程的一个例子的流程图。
45.若执行带剩余寿命诊断例程,则管理中心90的计算机92执行输入频率映射map和总行驶距离dt的处理(步骤s200)。总行驶距离dt经由dcm89、通信装置96而输入由机动车10的里程表87检测出的距离。
46.然后,对频率映射map的形状和浓淡与判定用映射(判定用频率分布)pj1~pj4的形状和浓淡进行比较,从而判定作为多楔带bv的劣化程度的劣化速度rd(步骤s210)。判定用映射pj1~pj4是作为与多楔带bv的劣化速度相应的运转点po的频率分布,通过实验、解析等而被预先确定的。
47.图7是表示判定用映射pj1的一个例子的说明图。图8是表示判定用映射pj2的一个例子的说明图。图9是表示判定用映射pj3的一个例子的说明图。图10是表示判定用映射pj4的一个例子的说明图。在图7~图10中,用虚线表示作为在多楔带bv产生共振的中转速、中负荷率的运转区域的共振区域。用单点划线表示作为发动机12怠速运转时的怠速运转点周
边的运转区域的怠速运转区域。在判定用映射pj1~pj4中,运转频率feo高的运转区域ao记载为比运转频率feo低的运转区域ao浓。
48.如图7所示,在判定用映射pj1,共振区域内的运转点po下的运转频率feo、怠速运转区域的运转频率feo、共振区域外和怠速运转区域外的运转区域(在图中为高旋转高负荷区域)中的运转频率feo高。如图8所示,在判定用映射pj2,共振区域内的运转点po下的运转频率feo、怠速运转区域中的运转频率feo高。如图9所示,在判定用映射pj3,怠速运转区域中的运转频率feo高。如图10所示,在判定用映射pj4,共振区域外、怠速运转区域外的运转区域中的运转频率feo(在图中为高旋转高负荷区域)高。认为在共振区域内的运转点po下的发动机12的运转频率feo高时,与运转频率feo低时相比,多楔带bv的振动变大而发热的机会多,从而多楔带bv的劣化速度(劣化程度)大。另外,在发动机12怠速运转时,大多是车辆停止的时候,行驶风少,所以,热不从收纳有发动机12的发动机室内逸散,发动机室内成为高温,多楔带bv成为高温而易于加速发展。因此,认为在怠速运转区域中的发动机12的运转频率feo高时,与运转频率feo低时相比,多楔带bv的劣化速度(劣化程度)大。因此,判定用映射pj1~pj4按照该顺序依次劣化速度变快(劣化程度变高),从而成为反映了劣化速度的恰当的映射。
49.步骤s210的频率映射map的形状和浓淡与判定用映射pj1~pj4的形状和浓淡的比较是将频率映射map和判定用映射pj1~pj4分别看作图像并采用利用人工智能(ai)的图像识别处理来进行的。
50.在利用人工智能(ai)的图像识别处理中,首先,将频率映射map作为图像来实施噪声除去、背景除去等前处理,然后执行利用ai的图像识别。在利用ai的图像识别中,首先,从用浓淡表示的运转频率feo的图像提取作为图像的特征(例如,在图5中,在较低的转速ne和较低的负荷率kl中存在浓区域等)。然后,将提取的特征与ai学习的判定用映射pj1~pj4的特征进行比较。
51.作为判定用映射pj1的特征,能够举出图7所示那样3个椭圆隔开间隔地配置且各椭圆的中央部比其周边部浓等。作为判定用映射pj2的特征,能够举出图8所示那样横长的2个椭圆隔开间隔地配置且各椭圆的中央部比其周边部浓等。作为判定用映射pj3的特征,能够举出图9所示那样左下存在1个椭圆且椭圆的中央部比其周边部浓等。作为判定用映射pj4的特征,能够举出图10所示那样横长的1个椭圆在右上配置且椭圆的中央部比其周边部浓等。
52.在频率映射map的特征与判定用映射pj1~pj4的任一个的特征一致时,判定多楔带bv的劣化速度rd为与一致的判定用映射相对应的劣化速度。频率映射map采用发动机12实际在运转点po运转的运转频率feo来设定,所以,与采用解析程序等来判定劣化速度相比,能够更高精度地判定多楔带bv的劣化速度、即劣化程度。
53.若这样判定劣化速度rd,则基于劣化速度rd来设定能行驶总距离dab(步骤s220)。能行驶总距离dab作为在多楔带bv达到寿命之前能行驶的距离,通过实验、解析等而被预先确定。能行驶总距离dab被设定为,劣化速度rd快时比劣化速度rd慢时长。
54.若这样设定能行驶总距离dab,则将从能行驶总距离dab减去在步骤s200中输入的总行驶距离dt而得到的值(=dab-dt)、即从当前时间点到多楔带bv达到寿命之前能行驶的距离设定为多楔带bv的剩余寿命lt(步骤s230),结束带剩余寿命诊断例程。这样,由于采用
实际的发动机12的运转点po的频率分布来诊断多楔带bv的剩余寿命lt,所以,能够更高精度地诊断多楔带bv的剩余寿命lt。
55.另外,由于基于频率映射map和按多楔带bv的各劣化速度(劣化程度)而预先确定的判定用映射pj1~pj4来设定多楔带bv的劣化速度(劣化程度)rd,并基于设定的劣化速度(劣化程度)rd来设定多楔带bv的剩余寿命lt,所以,能够更恰当地诊断多楔带bv的剩余寿命。
56.管理中心90在这样诊断多楔带bv的剩余寿命lt后的机动车10的行驶距离达到了剩余寿命lt时,判断为多楔带bv达到寿命,向机动车10发送催促多楔带bv的更换的信息。在接收到催促多楔带bv的更换的信息的机动车10中,在未图示的车厢内的显示器显示表示用于催促多楔带bv的更换的信息,从而能够向用户催促多楔带bv的更换。
57.根据具有以上说明的实施例的带剩余寿命诊断装置的车辆诊断系统1,基于由发动机12的转速ne和负荷率kl构成的运转点po的频率分布即频率映射map来设定多楔带bv的劣化程度,从而能够更高精度地诊断多楔带bv的剩余寿命。
58.另外,可以基于频率映射map和按多楔带bv的各劣化速度(劣化程度)而确定的判定用映射pj1~pj4来设定多楔带bv的劣化速度(劣化程度)rd,并基于设定的劣化速度(劣化程度)rd来诊断多楔带bv的剩余寿命。这样一来,能够更恰当地诊断多楔带bv的剩余寿命。
59.而且,判定用映射pj1~pj4中,劣化程度高的判定用映射与劣化程度低的判定用映射相比,在多楔带bv产生共振的发动机12的运转区域即共振区域内的运转点po下的运转频率feo高。这样一来,能够使得判定用映射pj1~pj4更恰当。
60.并且,判定用映射pj1~pj4中,劣化程度高的判定用映射与劣化程度低的判定用映射相比,怠速运转区域中的运转频率feo高。这样一来,能够使得判定用映射pj1~pj4更恰当。
61.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,在图4所例示的映射制作例程中,制作作为由发动机12的转速ne和负荷率kl构成的运转点po的频率分布的频率映射map。但是,可以是,在步骤s100中输入的发动机12的转速ne、负荷率kl为发动机12怠速运转时的转速nidl和值为0的负荷率kidl(=0)时,与发动机12的转速ne、负荷率kl一起输入来自车速传感器88的车速v并将其存储于非易失性存储器72,与步骤s120的处理一起,计测车速v为预定车速vref以上的次数n1(频率)和车速v小于预定车速vref的次数n2(频率)并将次数n1、n2发送到管理中心90。预定车速vref被设定为,不踩踏加速踏板83而使得车辆减速中等发动机室内进入新鲜空气、从而多楔带bv周围的环境温度下降的程度的车速(例如数10km/h等)。在此情况下,在次数n1为次数n2以上时,多楔带bv的温度下降,认为与次数n1小于次数n2时相比,多楔带bv的剩余寿命变长。因此,在图6的带剩余寿命诊断例程中,在步骤s230中,在次数n1小于次数n2时,将从能行驶总距离dab减去总行驶距离dt而得到的值设定为剩余寿命lt,在次数n1为次数n2以上时,将从能行驶总距离dab减去由总行驶距离dt加上预定距离dn而得到的值所得到的值设定为剩余寿命lt。
62.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,在图4所例示的映射制作例程中,在步骤s100中输入转速ne、负荷率kl并将其保存于非易失性存储器72,在步骤s120中采用转速ne、负荷率kl来制作频率映射map并将其发送到管理中心90。但是,也可以
采用燃料喷射率来代替负荷率kl。
63.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,基于频率映射map的形状和浓淡与按多楔带bv的各劣化程度而确定的判定用映射pj1~pj4的形状和浓淡,来设定多楔带bv的劣化速度(劣化程度)rd。但是,由于采用频率映射map和判定用映射pj1~pj4来设定多楔带bv的劣化速度(劣化程度)rd即可,所以,例如也可以不考虑频率映射map和判定用映射pj1~pj4的浓淡而基于频率映射map的形状和判定用映射pj1~pj4的形状来设定多楔带bv的劣化速度(劣化程度)rd,还可以不考虑频率映射map和判定用映射pj1~pj4的形状而基于频率映射map的浓淡和判定用映射pj1~pj4的浓淡来设定多楔带bv的劣化速度(劣化程度)rd。
64.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,基于频率映射map的形状和浓淡与按多楔带bv的各劣化程度而确定的判定用映射pj1~pj4的形状和浓淡,来设定多楔带bv的劣化速度(劣化程度)rd,并基于设定的劣化速度(劣化程度)rd来诊断多楔带bv的剩余寿命。但是,也可以不采用判定用映射pj1~pj4而仅采用频率映射map来诊断多楔带bv的剩余寿命。在此情况下,在频率映射map中,在运转点po处于在多楔带bv产生共振的共振区域内的运转频率feo高时,与该运转频率feo低时相比,将剩余寿命lt设定得短,在运转点po成为发动机12怠速运转时的怠速运转点的运转频率feo高时,与该运转频率feo低时相比,将剩余寿命lt设定得短即可。
65.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,由机动车10的ecu70执行图4所例示的映射制作例程。但是,也可以由管理中心90的计算机92执行映射制作例程的一部分或全部。
66.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,由管理中心90的计算机92执行图6所例示的带剩余寿命诊断例程。但是,也可以由机动车10的ecu70执行带剩余寿命诊断例程的一部分或全部。
67.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,诊断多楔带bv的剩余寿命。但是,诊断对象不限于多楔带bv,只要是由发动机12驱动的带,何种带都可以作为诊断对象。
68.在具有实施例的带剩余寿命诊断装置的车辆诊断系统1中,将本发明适用于具有在发动机12的动力下行驶的机动车10的系统。但是,机动车10也可以是通过来自发动机12的动力和来自电机的动力而能行驶的混合动力车。另外,也可以适用于列车、建设机械等与机动车不同的车辆来代替机动车10。而且,本发明不限于适用于搭载有发动机12的车辆,也可以适用于与车辆不同的装置、例如搭载发动机12并设置于发电设备等的发动机装置。
69.对实施例的主要要素与用于解决课题的手段那一栏中记载的发明的主要要素的对应关系进行说明。在实施例中,机动车10的ecu70和管理中心90的计算机92相当于“带剩余寿命诊断装置”。
70.此外,关于实施例的主要要素与用于解决课题的手段那一栏中记载的发明的主要要素的对应关系,由于实施例是用于对实施解决课题的手段那一栏中记载的发明的方式进行具体说明的一个例子,所以,并不限定用于解决课题的手段那一栏中记载的发明的要素。也就是说,对用于解决课题的手段那一栏中记载的发明的解释应基于那一栏的记载来进行,实施例只不过是用于解决课题的手段那一栏中记载的发明的具体的一个例子。
71.以上,采用实施例对用于本发明的方式进行了说明,但本发明并不受这样的实施例的任何限定,在不脱离本发明的要旨的范围内,当然能以各种方式来实施。
72.本发明能利用于带剩余寿命诊断装置的制造产业等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1