室外移动机器人超宽带定位系统初始化方法与流程
1.本发明涉及一种室外移动机器人超宽带定位系统初始化方法,属于移动机器人领域。
背景技术:
2.超宽带无线通信是一种不用载波,而采用时间间隔极短(小于1ns)的脉冲进行通信,因此也称为脉冲无线电通信,可以应用于移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度。超宽带定位技术一般采用飞行时间法(tof)进行测距,根据电磁波信号在基站和标签之间的飞行时间计算两个收发模块之间的距离,在工作环境中布置多个位置已知的定位标签,需要定位的人员或者设备携带定位基站,定位基站按照一定的顺序测量自身与定位标签的距离,通过一定的算法精确计算定位基站的位置。这种定位方式具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点,但是定位标签的位置需要预先测量,这给系统应用带来一定困难。
技术实现要素:
3.本发明的目的是为了克服现有技术中的不足之处,实现室外移动机器人自动计算超宽带标签的位置,并建立坐标系,为室外移动机器人提供精确定位的基础。
4.本发明解决其技术问题所采用的技术方案是:室外移动机器人超宽带定位系统初始化方法,所述的室外移动机器人包括运动工作平台,以及设置在工作区域边缘的充电基座,所述的运动工作平台在顶部设置超宽带基站天线,所述的运动工作平台内部设置电子装置,所述的电子装置包括进行集中控制的处理器,与所述的处理器连接的超宽带基站,所述的超宽带基站的信号端连接所述的超宽带基站天线,与所述的处理器连接的wifi模块,用于与用户手机连接;所述的充电基座的顶部设置第一超宽带标签天线,内部设置第一超宽带标签,所述的第一超宽带标签的信号端连接所述的第一超宽带标签天线;还包括设置在工作区域边缘的第二超宽带标签和第三超宽带标签,所述的第二超宽带标签的信号端连接第二超宽带标签天线,所述的第三超宽带标签的信号端连接第三超宽带标签天线,所述的充电基座,第二超宽带标签和第三超宽带标签等间距设置,所述的处理器用于执行所述的定位系统初始化方法,用于所述的室外移动机器人正式使用之前建立坐标系,确定所述的充电基座,第二超宽带标签和第三超宽带标签的坐标,包括以下步骤:(1)当所述的室外移动机器人位于所述的充电基座内时,所述的处理器控制所述的超宽带基站与所述的第二超宽带标签进行测距,获得距离l
02
,与所述的第三超宽带标签进行测距,获得距离l
03
;(2)所述的室外移动机器人通过所述的wifi模块与用户的手机建立连接,用户通过手机控制所述的室外移动机器人沿着工作区域边缘运动,进行环境边界学习;同时所述的处理器每隔固定周期t控制所述的超宽带基站分别与所述的第一超宽带标签、第二超宽
带标签和第三超宽带标签进行测距,获得距离l
i1
,l
i2
,l
i3
,并进行保存,i=1,2,3.....,代表测量的序号;(3)当所述的室外移动机器人回到所述的充电基座,完成环境边界学习;(4)对所有保存的数据,计算|l
i2-l
i3
|,比较出最小值,得到i=m,|l
m2-l
m3
|为最小值;计算|l
i1-l
i3
|,比较出最小值,得到i=n,|l
n1-l
n3
|为最小值;计算|l
i1-l
i2
|,比较出最小值,得到i=q,|l
q1-l
q2
|为最小值,其中m,n,q为i的具体值;(5)计算所述的第一超宽带标签,第二超宽带标签和第三超宽带标签组成的三角形中,以所述的第一超宽带标签为顶点的角的角度θ1=arccos{[(l
02
)2+(l
m1
)
2-(l
m2
)2]/(2
·
l
02
·
l
m1
)}+arccos{[(l
03
)2+(l
m1
)
2-(l
m3
)2]/(2
·
l
03
·
l
m1
)};计算所述的第二超宽带标签和第三超宽带标签之间的距离l
23
=;(6)计算所述的第一超宽带标签,第二超宽带标签和第三超宽带标签组成的三角形中,以所述的第二超宽带标签为顶点的角的角度θ2=arccos{[(l
23
)2+(l
n2
)
2-(l
n3
)2]/(2
·
l
23
·
l
n2
)}+arccos{[(l
02
)2+(l
n2
)
2-(l
n1
)2]/(2
·
l
02
·
l
n2
)};计算所述的第一超宽带标签和第三超宽带标签中间的距离l
13
=;(7)计算所述的第一超宽带标签,第二超宽带标签和第三超宽带标签组成的三角形中,以所述的第三超宽带标签为顶点的角的角度θ3=arccos{[(l
13
)2+(l
q3
)
2-(l
q1
)2]/(2
·
l
13
·
l
q3
)}+arccos{[(l
23
)2+(l
q3
)
2-(l
q2
)2]/(2
·
l
23
·
l
q3
)};计算所述的第一超宽带标签和第二超宽带标签中间的距离l
12
=;(8)重新计算所述的第一超宽带标签,第二超宽带标签和第三超宽带标签组成的三角形中,以所述的第一超宽带标签为顶点的角的角度θ1=arccos{[(l
12
)2+(l
13
)
2-(l
23
)2]/(2
·
l
12
·
l
13
)}。
[0005]
所述的定位系统初始化方法还包括极坐标系建立方法:以所述的第一超宽带标签为极点,以所述的第一超宽带标签和第二超宽带标签所在直线为极轴,指向所述的第二超宽带标签,建立极坐标系,因此所述的第一超宽带标签的坐标为(0,0),所述的第二超宽带标签的坐标为(l
12
,0),所述的第三超宽带标签的坐标为(l
13
,θ1)。
[0006]
可选的,所述的定位系统初始化方法还包括直角坐标系建立方法:以所述的第一超宽带标签为原点,以所述的第一超宽带标签和第二超宽带标签所在直线为x轴,指向所述的第二超宽带标签,建立直角坐标系,因此所述的第一超宽带标签的坐标为(0,0),所述的第二超宽带标签的坐标为(l
12
,0),所述的第三超宽带标签的坐标为(l
13
·
cosθ1,l
13
·
sinθ1)。
[0007]
实施本发明的积极效果是:1、不需要人工测量超宽带标签的位置,并自动建立坐标系;2、定位系统具有安全性高、系统复杂度低、能提供精确定位精度等优点。
附图说明
[0008]
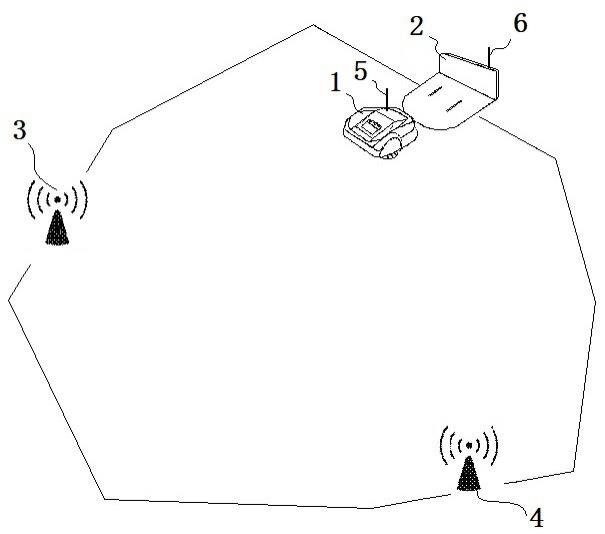
图1是本发明的定位系统示意图;图2是本发明的定位系统初始化方法的计算位置1;图3是本发明的定位系统初始化方法的计算位置2;
图4是本发明的定位系统初始化方法的计算位置3。
具体实施方式
[0009]
现结合附图对本发明作进一步说明:参照图1-4,室外移动机器人超宽带定位系统初始化方法,所述的室外移动机器人包括运动工作平台1,以及设置在工作区域边缘的充电基座2。所述的运动工作平台1可实现工作区域范围内自由运动,完成设定的工作任务。所述的充电基座2为所述的运动工作平台1提供位置基准和充电接口。
[0010]
所述的运动工作平台1在顶部设置超宽带基站天线5,进行无线电磁波信号接收和发射,所述的运动工作平台1的内部设置电子装置,所述的电子装置包括进行集中控制的处理器,与所述的处理器连接的超宽带基站,所述的超宽带基站的信号端连接所述的超宽带基站天线5,与所述的处理器连接的wifi模块,用于与用户手机连接。所述的超宽带基站可采用沃旭通讯公司的uwb定位基站ua-231。所述的wifi模块可采用esp8266透传模块,与用户手机连接以后可以接收运动指令,并上传所述的室外移动机器人的状态信息。
[0011]
所述的充电基座2的顶部设置第一超宽带标签天线6,内部设置第一超宽带标签,所述的第一超宽带标签的信号端连接所述的第一超宽带标签天线6。因此所述的充电基座2不仅提供充电的接口,还提供位置基准。还包括设置在工作区域边缘的第二超宽带标签3和第三超宽带标签4,所述的第二超宽带标签3的信号端连接第二超宽带标签天线,所述的第三超宽带标签4的信号端连接第三超宽带标签天线。所述的充电基座2,第二超宽带标签3和第三超宽带标签4等间距设置,形成一个等边三角形,与所述的运动工作平台1上的超宽带基站组成所述的定位系统。所述的第一超宽带标签、第二超宽带标签3和第三超宽带标签4可采用沃旭通讯公司的uwb定位标签ut-230。
[0012]
所述的处理器用于执行所述的定位系统初始化方法,用于所述的室外移动机器人正式使用之前建立坐标系,确定所述的充电基座2,第二超宽带标签3和第三超宽带标签4的坐标,包括以下步骤:(1)当所述的室外移动机器人位于所述的充电基座2内时,所述的处理器控制所述的超宽带基站与所述的第二超宽带标签3进行测距,获得距离l
02
,与所述的第三超宽带标签4进行测距,获得距离l
03
;所述的超宽带基站与所述的第二超宽带标签3和第三超宽带标签4采用飞行时间法进行测距,根据电磁波信号在基站和标签之间的飞行时间计算两者之间的距离,可以实现厘米级的测距精度。因此所述的室外移动机器人位于所述的充电基座2内时,距离l
02
近似等于所述的第一超宽带标签与第二超宽带标签3 之间的距离,距离l
03
近似等于所述的第一超宽带标签与第三超宽带标签4 之间的距离。
[0013]
(2)所述的室外移动机器人通过所述的wifi模块与用户的手机建立连接,用户通过手机控制所述的室外移动机器人沿着工作区域边缘运动,进行环境边界学习;同时所述的处理器每隔固定周期t控制所述的超宽带基站分别与所述的第一超宽带标签、第二超宽带标签3和第三超宽带标签4进行测距,获得距离l
i1
,l
i2
,l
i3
,并进行保存,i=1,2,3.....,代表测量的序号;经过环境边界学习,一方面是所述的室外移动机器人确定工作区域的范围,避免
工作过程中超出工作区域,造成可能的危险;另一方面为所述的第二超宽带标签3和第三超宽带标签4的位置计算采集了数据。
[0014]
(3)当所述的室外移动机器人回到所述的充电基座2,完成环境边界学习;(4)对所有保存的数据,计算|l
i2-l
i3
|,比较出最小值,得到i=m,|l
m2-l
m3
|为最小值;计算|l
i1-l
i3
|,比较出最小值,得到i=n,|l
n1-l
n3
|为最小值;计算|l
i1-l
i2
|,比较出最小值,得到i=q,|l
q1-l
q2
|为最小值,其中m,n,q为i的具体值;在保存的位置数据中,选择所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4之间的等距离位置,进行定位系统初始化的计算。
[0015]
(5)计算所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4组成的三角形中,以所述的第一超宽带标签为顶点的角的角度θ1=arccos{[(l
02
)2+(l
m1
)
2-(l
m2
)2]/(2
·
l
02
·
l
m1
)}+arccos{[(l
03
)2+(l
m1
)
2-(l
m3
)2]/(2
·
l
03
·
l
m1
)};计算所述的第二超宽带标签3和第三超宽带标签4之间的距离l
23
=;如图2所示,在所述的第一超宽带标签,第二超宽带标签3和超宽带基站组成的三角形中,以所述的第一超宽带标签为顶点的角的角度为arccos{[(l
02
)2+(l
m1
)
2-(l
m2
)2]/(2l
02
l
m1
)};在所述的第一超宽带标签,第三超宽带标签4和超宽带基站组成的三角形中,以所述的第一超宽带标签为顶点的角的角度为arccos{[(l
03
)2+(l
m1
)
2-(l
m3
)2]/(2l
03
l
m1
)},因此得到所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4组成的三角形中,以所述的第一超宽带标签为顶点的角的角度θ1=arccos{[(l
02
)2+(l
m1
)
2-(l
m2
)2]/(2l
02
l
m1
)}+arccos{[(l
03
)2+(l
m1
)
2-(l
m3
)2]/(2l
03
l
m1
)}。进一步可以,已知两边长度和夹角,就可以算出边长,即距离l
23
。
[0016]
(6)计算所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4组成的三角形中,以所述的第二超宽带标签3为顶点的角的角度θ2=arccos{[(l
23
)2+(l
n2
)
2-(l
n3
)2]/(2
·
l
23
·
l
n2
)}+arccos{[(l
02
)2+(l
n2
)
2-(l
n1
)2]/(2
·
l
02
·
l
n2
)};计算所述的第一超宽带标签和第三超宽带标签4中间的距离l
13
=;同样的方法,如图3所示,可计算角度θ2和距离l
13
。
[0017]
(7)计算所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4组成的三角形中,以所述的第三超宽带标签4为顶点的角的角度θ3=arccos{[(l
13
)2+(l
q3
)
2-(l
q1
)2]/(2
·
l
13
·
l
q3
)}+arccos{[(l
23
)2+(l
q3
)
2-(l
q2
)2]/(2
·
l
23
·
l
q3
)};计算所述的第一超宽带标签和第二超宽带标签3中间的距离l
12
=;同样的方法,如图4所示,可计算角度θ3和距离l
12
。
[0018]
(8)重新计算所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4组成的三角形中,以所述的第一超宽带标签为顶点的角的角度θ1=arccos{[(l
12
)2+(l
13
)
2-(l
23
)2]/(2
·
l
12
·
l
13
)}。
[0019]
在获得所述的第一超宽带标签,第二超宽带标签3和第三超宽带标签4之间的相互距离l
12
、l
13
和l
23
之后,重新计算角度θ1,这样可以消除距离l
02
对l
12
的近似,距离l
03
对l
13
的近似所带来的误差。
[0020]
所述的定位系统初始化方法还包括极坐标系建立方法:以所述的第一超宽带标签为极点,以所述的第一超宽带标签和第二超宽带标签3所在直线为极轴,指向所述的第二超
宽带标签3,建立极坐标系,因此所述的第一超宽带标签的坐标为(0,0),所述的第二超宽带标签3的坐标为(l
12
,0),所述的第三超宽带标签4的坐标为(l
13
,θ1)。
[0021]
可选的,所述的定位系统初始化方法还包括直角坐标系建立方法:以所述的第一超宽带标签为原点,以所述的第一超宽带标签和第二超宽带标签3所在直线为x轴,指向所述的第二超宽带标签3,建立直角坐标系,因此所述的第一超宽带标签的坐标为(0,0),所述的第二超宽带标签3的坐标为(l
12
,0),所述的第三超宽带标签4的坐标为(l
13
·
cosθ1,l
13
·
sinθ1)。
[0022]
综上所述,本发明提供了一种室外移动机器人超宽带定位系统初始化方法,实现室外移动机器人自动计算超宽带标签的位置,并建立坐标系,为室外移动机器人提供精确定位基础,不需要人工测量超宽带标签的位置,定位系统具有安全性高、系统复杂度低、能提供精确定位精度等优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1