一种利用日照光源测量地外天体样本取样量的方法
1.本发明属于深空探测领域,尤其涉及一种利用日照光源测量地外天体样本取样量的方法。
背景技术:
2.太空探索任务往往需要高昂的预算,加上运输火箭的承载力有限,载荷的设计需严格控制重量。其中,地外天体采样返回的任务对所有系统有更严苛的重量要求,所以各系统除结构外,电、通讯的资源类使用量亦需极致地优化。采样返回任务的主要目的,是从月球、火星、小行星等的地外天体进行采样并将样本带返地球。这类任务均会对采样量定下目标,采样机构、容器及封装机构都会跟据此目标设计采样量和容器最高的样本收集量。当采样机构的每次最大采样量低于样本容器的最大收集量,样本容器的设计就需考虑能够估算或测量容器满载度的功能。地面人员在采样操作进行期间,通过此功能对采样量进行准确评估,务求在保持高安全度、高可靠度的状态下将样本的返回量最大化。在缺乏对满载度有准确评估的情况下,样本容器有机会出现满载、溢载的状态,导致无法对容器进行封装,威胁整个任务的成败。所以,测量容器满载度是重要的功能,而一个重量轻和资源占用量少的设计则对整体任务有利。
3.以往的地外天体采样返回任务,对采样量采用如下不同的处理方式:(1)以未知实际采样量的情况下返回地球,在地面开启样本封装机构后使用仪器量度;(2)透过安装在载荷上的测重仪器量度容器内的采样量;(3)透过安装在载荷上的仪器量度样本在容器管内的深度。但是上述方式存在如下问题:第(1)种方式,不能得知采样量,增大不确定性、降低任务的可靠度;第(2)和(3)种方式,需安装额外仪器,增大载荷重量、电子部件会增大失效率、降低整体可靠度。
技术实现要素:
4.针对以上技术问题,本发明公开了一种利用日照光源测量地外天体样本取样量的方法,所需要的设备除一般探测器本身因任务需求都已经配备的相机外,无需额外配备任何传感器,可以准确获得取样量,可靠度高。
5.对此,本发明采用的技术方案为:
6.一种利用日照光源测量地外天体样本取样量的方法,其包括:
7.利用日照光源照射到样本容器上,所述样本容器附近设有可移动的相机,通过相机拍摄样本容器的外观及其内壁的影像,获得采样样品在样本容器中的高度,结合样本容器本身的尺寸结构,通过计算得到采样量。进一步的,该方法基于探测器地外天体着陆位置、着陆角度及日照光源角度使用影像判断计算样本容器采样量。
8.采用此技术方案,样本容器的内壁能在有光源的情况下产生光影、光纹,该光影、光纹可以作为标记位置,进而可以计算得到样本容器内样品的顶部在样本容器内的位置,进而可以计算得到采样量。对于天空探测而言,越多电子零部件,越会增大失效的可能性。
而无需传感器,亦代表载荷无需增加额外重量。此技术方案不需要额外增加电子零部件,可靠性高,避免了使用非光源产生的刻度(例如刻上数值、特定形状)有机会因为影像模糊而影响采样量计算的准确性。
9.作为本发明的进一步改进,所述样本容器的内壁的粗糙度ra值为不小于0.8。
10.作为本发明的进一步改进,所述样本容器的内壁光滑、或所述样本容器的内壁设有若干环状的纹路。采用此技术方案,通过样本容器内壁的环形纹路,可以在有光源的情况下产生的光影、光纹,在环形纹路的表面形成刻度标记,且以令光源产生的刻度标记在不同的长度下,保持一致形状,光影产生的纹理在影像模糊和清晰的情况下都能够被分辨,结果准确度高。
11.作为本发明的进一步改进,所述若干环状的纹路在车削加工过程中生成。
12.作为本发明的进一步改进,所述样本容器采用机械加工工艺一体成型。
13.作为本发明的进一步改进,所述计算包括如下步骤:
14.采用如下公式计算得到样本容器内采样样品的顶部在样本容器内的半径b:
[0015][0016]
其中,α为相对于采用容器底部平面的太阳光照角度,β为样本容器侧壁的锥度,c为样本容器顶端口部至样本容器内采样样品最高位置的距离,hc为样本容器内采样样品最高位置距离样本容器底部的高度,r为样本容器顶部的最大半径,r为样本容器底部的有效半径,w为样本容器顶端口部半径;
[0017]
获得b值后,通过锥度计算样本位置顶端和样本容器本身特征(例如底部)的相对距离和关系,从而得知实际的采样量。
[0018]
因样本容器的外型在地外天体时,跟在离开地球前保持一致。而容器供存放样本的部分,外型程锥体形状。所以,在得知b值后,就可以透过锥度计算样本位置顶端和容器本身特征(例如底部)的相对距离和关系。从而得知实际的采样量。
[0019]
作为本发明的进一步改进,调节相机与样本容器之间的距离,当相机能清晰拍摄日照光源所投射到容器内壁的光影以及样本容器内样本顶端表面时,获得f值,采用如下公式进行计算得到样本容器内样品的体积v:
[0020][0021]
其中,r为样本容器底部的有效半径,h为相机距离容器底部的距离,f为相机的焦距,k=cot(90
°‑
β),m=tan(90
°‑
β),β为样本容器侧壁的锥度。
[0022]
作为本发明的进一步改进,所述相机为定焦镜。
[0023]
与现有技术相比,本发明的有益效果为:
[0024]
采用本发明的技术方案,利用日晷原理,利用日照光源照射样本容器顶端时,阳光会投射到容器的内壁,在内部表面形成光影,产生刻度标记,这样就可以简单通过日照光源直接地将目标显示出来,透过视觉(例如黑白或彩色相机)就可根据产生刻度标记的长度和
形状,从而判断样本在容器内的高度及采样量从而准确的计算得到采样量,采用这种方式所需要的设备除一般探测器本身因任务需求都已经配备的相机外,无需额外配备任何传感器,大大降低了失效的可能性,无需增加额外重量,可靠性高。
附图说明
[0025]
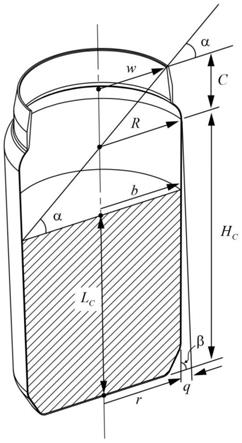
图1是本发明实施例1在光照入样本容器的剖面示意图。
[0026]
图2是本发明实施例1在光照入样本容器内壁形成的光影图片,其中(a)、(b)和(c)为不同光照环境下样本容器内壁的纹理反射出来的光纹图片。
[0027]
图3是本发明实施例2在光照入样本容器的剖面示意图。
[0028]
图4是本发明实施例2的不同采样量的示意图,其中(a)为100%取样量,(b)为90%取样量,(c)为80%取样量,(d)为70%取样量,(e)为60%取样量。
具体实施方式
[0029]
下面对本发明的较优的实施例作进一步的详细说明。
[0030]
实施例1
[0031]
一种探测器在地外天体时利用日照光源测量样本采样量的方法,该方法基于探测器地外天体着陆位置、着陆角度及日照光源角度使用影像判断计算样本容器采样量。就如日晷原理,简单直接地将目标显示出来。此技术所需要的设备除一般探测器本身因任务需求都已经配备的相机外,无需额外配备任何传感器。因为越多电子零部件,越会增大失效的可能性。该方法无需传感器,亦代表载荷无需增加额外重量。所述样本容器的内壁的粗糙度ra值为不小于0.8,所述样本容器通过机械加工工艺一体成型,其内壁在车削加工过程中,在容器的表面所产生的纹理和顺滑度,这些纹路呈环状,虽幼细但仍然能够直接用肉眼看得出来,亦能作为刻度标记使用,这样在有光源照射的情况下,内壁产生独特的反光光纹,光纹在容器罐内部由上至下以直线伸延形式显示出來,形成刻度标记,且刻度标记在不同的长度下,保持一致形状。另外,光纹的宽度,会因应一些参数而有所改变,例如光源的入射角、强度、采样量、样本材质的吸亮度、透射率、反射率等。但因为光纹总会由上至下伸延至被收集样本的顶部位置,采样量就可以得到计算。相机采用定焦镜,直接采用探测器上安装在附近本来就有的相机即可,这样从整体角度上,没有对任务增加任何重量、功耗,尽少地对总体构成负担来实现对采样量的测量。
[0032]
基于此,如图2所示,日照光源照射样本容器顶端时,阳光会投射到容器的内壁,在内部表面形成光影,因而产生刻度标记。而透过视觉(例如黑白或彩色相机)就可根据产生刻度标记的长度和形状,来判断样本在容器内的高度及采样量。
[0033]
具体来说,样本容器的内壁能在有光源的情况下产生光影或光纹,可以作为刻度标记。而且光影产生的纹理在影像模糊和清晰的情况下都能够被分辨。如图1所示,当样本容器倾斜角θ=0
°
,也就是样本容器不倾斜时,也就是光源的入射角的基准水平面与样本容器的底面平行时,采样量可以通过计算b值(样本容器内采样样品的顶部在样本容器内的半径)得知采样量,具体的推导过程如下:
[0034]
[0035][0036][0037][0038][0039][0040]
from(1),(w+b)tanα=c+(h
c-lc)
[0041][0042][0043][0044]
上述推导中,α为相对于采用容器底部平面的太阳光照角度,β为样本容器侧壁的锥度,c为样本容器顶端口部至样本容器内采样样品最高位置的距离,hc为样本容器内采样样品最高位置距离样本容器底部的高度,r为样本容器顶部的最大半径,r为样本容器底部的有效半径,w为样本容器顶端口部半径,q为容器底部有效半径与容器最大半径差,b为样本位置顶端口半径,lc为样本位置高度。
[0045]
因样本容器的外型在地外天体时,跟在离开地球前保持一致。而样本容器供存放样本的部分,外型程锥体形状。所以,获得b值后,通过样本容器本身的尺寸结构如锥度等就计算样本位置顶端和样本容器本身特征(例如与样本容器的底部)的相对距离和关系,从而可以得知实际的采样量。
[0046]
目前,很多人会使用相机作测量用途,但都是利用双目相机或多只相机建构三维模型,但本发明的技术方案只采用单个单目相机、单幅照片,就可以计算出采样量,方法简单,准确度高,也不给探测器造成额外的负担。
[0047]
实施例2
[0048]
因样本容器是安装在固定的面板上,所以相机位置跟容器物理尺寸的关系是已知状态。相机跟容器底部的距离以h代表。相机使用定焦镜,所以当相机能清晰拍摄日照光源所投射的刻度以及容器内样本顶端表面时,就可以得知f值,f为焦距,也就是相机跟容器内样本顶端表面的距离。当样本容器倾斜角θ≠0
°
,也就是样本容器倾斜时,也就是光源的入射角的基准水平面与样本容器的底面不平行时,在得知f值后,就可以通过如下推导计算v2值,得出采样量。其中,采样量是指采样容积。
[0049]
[0050]
m=tan(90
°‑
β)
[0051][0052]
h2=h-f
[0053][0054][0055]
如图3所示,r为样本容器底部的有效半径,h为相机距离样本容器底部的距离,f为相机的焦距,β为样本容器侧壁的锥度,h1为样本容器底部锥体高度,h2为样本容器底部至样本顶端之光轴方向高度,r为容器顶部最大半径,hc为样本容器内采样样品最高位置距离样本容器底部的高度;θ为样本容器倾斜角,αs为太阳入射角,α为相对于采用容器底部平面的太阳光照角度,其中,αs=α+θ;当样本容器倾斜角θ≠0
°
,那么α≠αs,可以采用上述公式计算得到v2。
[0056]
图4是为采样量/取样量/满载量的示意图。其中,满载(100%采样量)的定义为样本到达hc的高度位置,此高度是100%采样量的指标。
[0057]
在样本返回地球前,实际重量以假设密度估算;在样本返回地球后,可以以高精密仪器量度实际重量。
[0058]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1