一种海底管线悬跨及屈曲变形水下探测设备及探测方法
1.本发明涉及水下探测技术领域,尤其是一种海底管线悬跨及屈曲变形水下探测设备及探测方法,属于海洋工程减灾防灾领域。
背景技术:
2.海底管线在海洋油气运输以及电力传输方面应用广泛,被誉为海上生命线。海底管线的安全运营,直接影响着海洋资源的安全输送。
3.然而海底管线所处环境较为复杂,一方面,由于浪流冲刷和复杂海床地质条件的存在,海底管线经常会形成不同长度的自由悬跨。黄河三角洲地区对于水下10m处,在海底管线设计寿命15年内,海床整体冲刷深度可达0.7m,海底管线悬跨长度3-40m,有的甚至达到60-70m,悬空高度0.5-3.0m,因海床侵蚀造成的管线悬跨问题十分严重。管线悬跨改变了管线的受力状态,浪流等环境载荷作用和管线自重会使管线产生较大弯矩而破坏;水动力作用引起管线涡激振动,造成管线的疲劳破坏。另一方面,在温度、压力、构型缺陷、浪流、海床底质条件等因素所用下,海底管线产生总体屈曲现象。总体屈曲变形包括侧向屈曲和隆起屈曲。侧向屈曲往往会造成海底管线局部屈曲、疲劳损坏等;隆起屈曲导致管线裸露在海床上,增加管线被破坏的风险。总体屈曲现象对海洋管线的完整性和安全性造成严重后果。
4.为了保证海底管线的安全,需要掌握管线悬跨以及屈曲现象的发展情况。目前,针对海底管线悬跨的观测技术手段主要有潜水员检测技术、物探调查技术等。其中物探调查技术主要采用多波束测深系统、浅地层剖面仪和侧扫声呐等仪器实施作业,但是使用成本较和数据解析难度高;潜水员检测风险大、成本高,在深海中不适用。因此,需要研究适应范围广、精度高、经济性强的海底管线冲刷三维形态探测技术。管线屈曲变形则主要采用屈曲探测器、rov/auv拍摄及搭载传感器进行检测。其中屈曲探测器存在被卡住、牵引钢丝绳破断和屈曲探测器解体等风险;rov/auv检测需要多传感器协同检测,检测精度受声学图像的解释方法影响较大。因此,需要研究操作简单、精度高、安全性好的海底管线探测设备及方法。
5.申请号为201922231812.8的中国专利申请公布了一种海底管线实时安全监测与诊断系统。该方法沿现有管线铺设光缆并在光缆上安装声音传感器,监测海底管线的泄露以及靠近管线的船舶,并利用光纤因失去土壤支撑而振动的特性监测管线悬空、位移或破坏。该方法不会对海底管线造成损伤,但是在管线裸露的情况下并不适用。
6.申请号为201510695307.2的中国专利申请公开了一种海底管线悬跨涡激振动主动监测系统及其方法。该方法通过监测涡激振动信息来监测海底管线悬跨,仅在涡激振动发生时进行信息传输,提高了监测效率。该方法数据处理较为繁琐,难度较大。
技术实现要素:
7.为了解决现有海底管线悬跨及屈曲变形观测手段依靠多种检测设备、数据解析难度高等问题,本发明提供了一种海底管线悬跨及屈曲变形水下探测设备及探测方法。本发
明的设备和探测方法适用于管线裸露的情况,数据解析难度低。
8.为实现以上目的,本发明采用下述技术方案:一种海底管线悬跨及屈曲变形水下探测设备,包括:第一控制中心;传输线缆;第一换能器基阵,所述第一换能器基阵安装于管线节点,所述第一换能器基阵通过传输线缆与第一控制中心连接;第二控制中心,所述第二控制中心与第一控制中心通信连接;脐带缆;水下履带式arv,所述水下履带式arv通过脐带缆与第二控制中心连接;第二换能器基阵,所述第二换能器基阵安装于所述水下履带式arv;中继信号站;和应答器,所述应答器设置于中继信号站;每一中继信号站设置至少一个应答器;所述第一换能器基阵发出询问信号,应答器接收询问信号并回复应答信号,第一换能器基阵收到应答信号并将该信号传递给第一控制中心,第一控制中心根据所接收信号数据计算出第一换能器基阵的绝对位置坐标,并将绝对位置坐标数据传递给第二控制中心,第二控制中心根据绝对位置坐标绘制管线立体形态图、评估管线的屈曲情况并输出水下履带式arv的三维行进路线;所述第二换能器基阵发出询问信号,应答器接收询问信号并回复应答信号,第二换能器基阵收到应答信号并将该信号传递给第二控制中心;第二控制中心根据所接受信号数据计算出水下履带式arv的实时坐标数据,进而求出管线的海床形貌图。
9.上述海底管线悬跨及屈曲变形水下探测设备,还可以包括中继站;所述中继站分别与第二控制中心、脐带缆连接;中继站可以实现水下履带式arv停靠,补充电源及传输信息,根据自主/遥控作业需要回收/对接脐带缆。更进一步地,所述中继站为可伸缩中继站。
10.所述第一换能器基阵和第二换能器基阵均为由一个收发合置换能器和两个接收换能器组成的“l”型三元基阵;所述收发合置换能器位于基阵原点,所述两个接收换能器分别位于基阵相互垂直的两个方向;合置换能器到两个接收换能器的距离相等。
11.所述管线节点,是指根据海底情况,在海底管线选取的位置。根据实际情况设计节点13的数量。一般管线屈曲长度为数十米到上百米,为保证屈曲有效监测,应使屈曲长度内设置3个以上节点,以便绘制屈曲形态图。其中,相邻节点之间的距离为,节点数量=管线长度/。根据实际情况设计中继信号站的数量。为保证超短基线定位精度及工程成本控制,应使节点与应答器直线距离小于100m,综合考虑超短基线设备精度、应答器高度、节点间距、斜距x(应答器到换能器基阵的距离)设置中继信号站间距。中继信号站间距确定之后,中继信号站的数量为=管线长度/(结果四舍五入)。
12.所述第一换能器基阵通过卡扣固定于管线节点;进一步地,所述卡扣为圆环形,预留传输线缆孔和第一换能器基阵位置;可实现传输线缆和第一换能器基阵固定。
13.所述第一控制中心可以是设置于海面的陆上控制中心。可以实现实时监控,监控具有稳定性。
14.所述第二控制中心可以设置于母船。
15.所述arv是指自主遥控水下机器人(autonomous and remotelyoperated vehicle),是一种面向极端环境或特殊使命任务、集auv和rov的部分技术特点于一身、具有自主作业和遥控作业工作模式的新型水下机器人。
16.进一步地,水下履带式arv的高度小于0.2m,便于在海底管线底部实施探测作业。
17.进一步地,水下履带式arv包括脐带缆连接口、探测装置、控制装置、动力装置、推进装置和履带装置;所述脐带缆连接口连接脐带缆,所述脐带缆连接口与中继信号站充电接口适配;所述探测装置包括高清摄像机、照明灯和前视声呐;所述控制装置分别连接探测装置、动力装置、推进装置和第二换能器基阵;所述推进装置连接履带装置;所述动力装置提供能源动力。
18.所述脐带缆连接口连接脐带缆实现水下履带式arv的遥控作业,所述脐带缆连接口与脐带缆断开的状态下与中继信号站充电接口连接为中继信号站充电;所述探测装置包括高清摄像机、照明灯和前视声呐,用于探测行走路线前方海床表面状况并识别障碍物;所述控制装置控制水下履带式arv沿规划路径形走,并根据探测装置、第二换能器基阵获得数据实时调整行走路径,到达中继站时,控制装置与第二控制中心通过中继站的脐带缆连接,第二控制中心输入新的指令到控制装置;所述动力装置为水下履带行进器提供行走、探测所需的能源动力,并为中继信号站进行电力补充;所述推进装置用于协助推动水下履带行进器的运动,实现水下履带式arv下放、上浮和浮游状态;所述第二换能器基阵用于发射询问信号,并接收应答信号,完成水下履带式arv定位工作;所述履带装置为水下履带式arv在海床表面行进提供牵引力,位于水下履带式arv两侧,便于水下履带式arv在冲刷后复杂的海床表面稳定行进。
19.更进一步地,推进装置包括垂向推进器和水平推进器,所述垂向推进器在水下履带式arv两侧各安装2个,水平推进器在水下履带式arv尾部对称安装2个。
20.一种采用上述海底管线悬跨及屈曲变形水下探测设备的探测方法,其步骤为:(1)划分海底管线节点;在卡扣上安装第一换能器基阵,并将卡扣安装于预设管线节点;(2)安装中继信号站;所述中继信号站与海底管线之间的距离大于安全距离,所述安全距离是指管线周围预估最大冲刷半径与中继信号站周围预估最大冲刷半径之和;中继信号站上安装应答器,标记应答器,并记录应答器坐标;(3)第一控制中心发布指令,使第一换能器基阵依次发射询问信号,应答器接收询问信号并发射应答信号,第一换能器基阵收到应答信号并将信号数据传递给第一控制中心;第一控制中心根据信号数据计算各节点的绝对位置坐标,并将绝对位置坐标数据传递给第二控制中心;(4)第二控制中心根据各节点的绝对位置坐标绘制管线三维形态图,并评估管线屈曲情况;第二控制中心根据管线各节点绝对位置坐标初步规划水下履带式arv的行进路径;(5)水下履带式arv连接脐带缆并将水下履带式arv投放至管线侧方;
(6)水下履带式arv在第二控制中心的控制下在管线侧方沿规划好的行进路径行走,并根据探测装置传回的图像调控前进方向和角度;(7)水下履带式arv在行走的同时第二换能器基阵发射询问信号,信号中继站上的应答器接收询问信号并发射应答信号,第二换能器基阵接收应答信号并将信号数据传递给第二控制中心;(8)第二控制中心处理信号数据,求得水下履带式arv的实时坐标数据,进而求出管线两侧的海床形貌图;根据管线两侧海床形貌图和探测装置传回的图像规划出需要重点探测的悬跨区域,并规划自主作业路线;(9)水下履带式arv关闭脐带缆连接,根据预先设计好的自主作业路线沿悬跨的管线底部行走;(10)水下履带式arv在管线底部行走的同时第二换能器基阵发射询问信号,信号中继站上的应答器接收询问信号并发射应答信号,第二换能器基阵接收应答信号并将信号数据传递给第二控制中心;(11)第二控制中心处理信号数据,求得水下履带式arv的实时坐标数据,进而求出管线底部的海床形貌图;(12)结合管线两侧的海床形貌图和管线底部的海床形貌图,绘制管线周围整体海床形态图,结合管线三维形态图,求得管线悬跨高度和悬跨长度。
21.上述探测方法,arv的投放方式可以采用中继站:连接脐带缆并将水下履带式arv放置在可伸缩中继站上;母船缓缓下放中继站至指定深度,中继站释放水下履带式arv,水下履带式arv降落至管线侧方。
22.上述探测方法,进一步地,水下履带式arv行走路径采取“ㄹ”状行走,行走路线间距根据实际作业情况调整,采用插值方法计算已得到行走路线之间的海床形貌,实现高效探测。
23.上述探测方法,步骤(7)或/和(9)重复进行三次以上,获得更加充足的行进数据以减少误差。
24.完成探测工作后,水下履带式arv在第二控制中心的控制下收缩至水面母船;在有中继站存在的情况下,水下履带式arv停靠中继站,中继站携带履带式arv收缩至水面母船。
25.上述探测方法,第一换能器基阵、第二换能器基阵-应答器定位过程:第一换能器基阵、第二换能器基阵中的收发合置换能器主动发射询问信号,中继信号站上的应答器接收到询问信号并回复应答信号,第一换能器基阵接收到应答信号并将该信号传递通过传输线缆传递给第一控制中心,第二换能器基阵收到应答信号并将该信号传递给第二控制中心和水下履带式arv,以此定位管线节点和水下履带式arv的实时坐标。所述第一控制中心用于调控第一换能器基阵响应,处理第一换能器基阵获取的管线节点三维坐标位置,并输出管线三维形态图,进而获得管线屈曲变形情况;所述传输线缆安装在管线顶部,由卡扣固定,与第一控制中心、第一换能器基阵相连,可以传递第一控制中心的调控指令、管线第一换能器基阵接收信号以及提供换能器等所需的能源;所述第二控制中心用于分析水下履带式arv拍摄的水下光学图像,处理arv第二换能器基阵获取的三维坐标位置,输出海床表面形态图,进而调控arv行走路线,为arv补充能源及提供信号中继站。
26.管线节点和水下履带式arv实时定位计算原理为:在初期安装中继信号站时,确定
好中继信号站上各应答器的绝对三维位置坐标,应答器标记为、
……
,,则应答器坐标为。第一换能器基阵、第二换能器基阵发出询问信号后会接收到个应答信号。距离第一换能器基阵、第二换能器基阵最近的中继信号站上的应答器回复的应答信号最先到达第一换能器基阵、第二换能器基阵,选取距离最近的中继信号站上的应答器回复的应答信号计算,即选取前个应答信号计算,分别对应应答器、
……
,。通过信号往返时间、
……
,,计算出应答器与换能器基阵原点的距离,通过接收换能器(非基阵原点)接收信号的相位差计算得出基阵原点接收的声线与两个相互垂直的基线的夹角。则可根据以上数据求出应答器相对于第一换能器基阵、第二换能器基阵的坐标。根据应答器的绝对三维位置坐标和应答器-第一换能器基阵、第二换能器基阵的相对位置坐标,来计算第一换能器基阵、第二换能器基阵的绝对三维位置坐标,进而绘制管线三维形态变化图和水下履带式arv行进路线图,进而获取管线屈曲变形和悬跨的数据。
27.应答器相对于换能器基阵原点的相对位置坐标为,,:,,;因为应答器绝对位置坐标为,只取前n个信号进行定位,所以换能器基阵原点的绝对坐标为:,|,|;其中,。
28.因此,管道节点的绝对坐标为,海床表面的绝对坐标为。其中,d为管道直径,z为第二换能器基阵距离水下履带式arv底部的高度,为中继信号站是数量,n为每一中继信号站所安装的响应器的数量。
29.与现有技术相比,本发明的有益效果是:(1)提供了一种基于换能器基阵-应答器的海底管线悬跨探测方法,该方法数据解析难度低,不需要搭载其他检测设备,操作简单,补充了海底管线屈曲形态观测手段;
(2)提供了一种固定应答器-移动换能器基阵、多应答器-多换能器基阵的超短基线系统定位方式,在管线屈曲和悬跨探测过程中,实现高效定位;(3)提供了一种多应答器-多换能器基阵的超短基线信号筛选方式,降低了多信号干扰的可能性;(4)相对于仅在涡激振动发生时进行信息传输,本发明的方法可实现管线的实时监测,为研究管线屈曲发展动态过程提供了有效方法;(5)采用水下履带式arv,可根据作业环境是管线底部/侧方切换自主/遥控式作业,并为中继信号站补充电源;(6)水下履带式arv的行进路线采取“ㄹ”状行走,实现管线悬跨的高效探测,有利于节约成本;(7)采取整体侧方探测和局部底部探测的方式,在进行底部探测时水下履带式arv与脐带缆断开连接,有效避免发生脐带缆缠绕现象。
附图说明
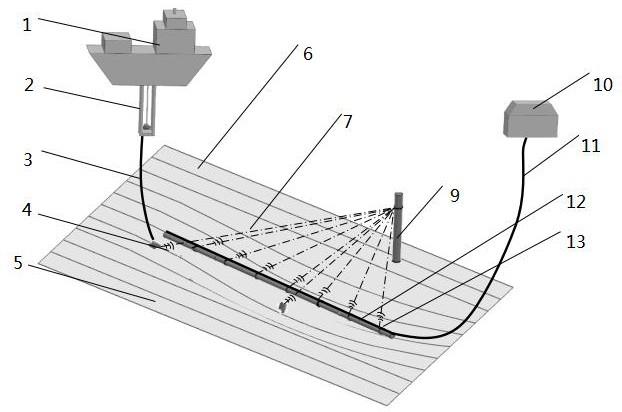
30.图1为本发明整体结构示意图;图2为换能器基阵及卡扣示意图;图3为管线节点定位原理示意图;图4为换能器基阵-应答器定位原理示意图;图5为海底管线初始状态示意图;图6为海底管线屈曲示意图;其中,a为海底管线隆起屈曲探测 , b为海底管线侧向屈曲探测 ;图7为履带式arv结构示意图;图8为水下履带式arv沿管线两侧行进路线俯视示意图;图9为水下履带式arv沿管线底面行进路线俯视示意图;其中,1第二控制中心,2中继站,3脐带缆,4水下履带式arv,401第二换能器基阵,402抓手,403脐带缆连接口,404控制装置,405动力装置,406水平推进器,407探测装置,408垂向推进器, 409履带装置,5行进路线,501管线两侧行进路线,502管线底部行进路线,6海床,7定位系统,8应答器,9中继信号站,10第一控制中心,11传输线缆,12海底管线,13节点,1301卡扣,1302第一换能器基阵,14接收换能器,15收发合置换能器。
具体实施方式
31.下面结合附图和实例对本发明进一步说明。
32.本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
33.如图1-9所示,一种海底管线悬跨及屈曲变形水下探测设备,包括:第一控制中心10、传输线缆11、第一换能器基阵1302、第二控制中心1、脐带缆3、水下履带式arv4、第二换能器基阵401、中继信号站9和应答器8;第一换能器基阵1302、第二换能器基阵401和应答器8组成了定位系统7;第一换能器基阵1302安装于管线节点13,第一换能器基阵1302通过传输线缆11与第一控制中心10连接;第二换能器基阵401安装于所述水下履带式arv4;水下履带式arv4通过脐带缆3与第二控制中心1连接;应答器8设置于中继信号站9;每一中继信号站9设置至少两个应答器8;第二控制中心1与第一控制中心10通信连接;第一换能器基阵1302发出询问信号,应答器8接收询问信号并回复应答信号,第一换能器基阵1302收到应答信号并将该信号传递给第一控制中心10,第一控制中心10根据所接收信号数据计算出第一换能器基阵1302的绝对位置坐标,并将绝对位置坐标数据传递给第二控制中心1,第二控制中心1根据绝对位置坐标绘制管线立体形态图、评估管线的屈曲情况并输出水下履带式arv4的三维行进路线5;第二换能器基阵401发出询问信号,应答器8接收询问信号并回复应答信号,第二换能器基阵401收到应答信号并将该信号传递给第二控制中心1;第二控制中心1根据所接受信号数据计算出水下履带式arv4的实时坐标数据,进而求出管线的海床6形貌图。
34.如图1所示,作为一种实施方式,第一控制中心10为陆上控制中心,设于海面或海面之上;第二控制中心1设置于母船。其中,第一控制中心10可以固定设置于海面或海面之上,也可以可移动设置于海面或海面之上。第一控制中心10为陆上控制中心,能够实现对管线的实时监测。第二控制中心1能够随着母船的移动而移动,从而实现长管线的长距离测量。其中,第一控制中心10和第二控制中心1均可以主要由计算机、数据存储器、数据读取器组成。
35.其中,第一换能器基阵1302与第一控制中心10之间的连接,为通信连接和电连接。水下履带式arv4与第二控制中心1之间的连接,为通信连接和电连接。
36.其中,每一节点13安装一个第一换能器基阵1302,每一arv安装一个第二换能器基阵401,每一中继信号站9安装至少2个应答器8(应答器8的数量为n);每一中继信号站9安装2个以上应答器8是为了获得多组数据减小误差。根据实际工程成本选择每一中继信号站9安装应答器8的数量。作为一种实施方式,每一中继信号站9安装2-3个应答器8;应答器8的排列方式为竖直等距排列。因为一个中继信号站9配合多个节点13定位,采用其他排列方式存在会使应答器8接收/发射信号被中继信号站9影响。
37.其中,管线节点13,是指根据海底情况在海底管线12上选取的位置。一般管线屈曲长度为数十米到上百米,为保证屈曲有效监测,应使屈曲长度内设置3个以上节点13,以便绘制屈曲形态图。其中,两个节点13之间的距离为,节点数量为=管线长度/。为保证超短基线定位精度及工程成本控制,应使节点13与应答器8直线距离小于100m,综合考虑超短基线设备精度、应答器8的高度、节点13的间距、斜距x(应答器8到换能器基阵的距离)设置中继信号站9间距。中继信号站9间距确定之后,中继信号站9的数量为=管线长度/(结果四舍五入)。根据现有超短基线设备精度及安装误差校准方法,超短基线定位系统7精度可达5
‰
x。因此当斜距x=100m时,定位精度可达0.5m,能满足屈曲探测探测要求。例
如,根据实际情况设计节点13数量,为1302-1~1302-7;中继信号站9间隔距离为,中继信号站9数量为,为901、902;一个中继信号站9配合/,按照四舍五入取值;中继信号站9上安装个应答器8,共四个应答器8,为801~804,每两个应答器8配合/个节点13定位,即中继线号站801上的应答器801、802配合第一换能器基阵1302-1~1302-4,中继线号站802上的应答器803、804配合第一换能器基阵1302-4~1302-7。
38.如图2所示,作为一种具体实施方式,第一换能器基阵1302通过卡扣1301固定于管线节点13。例如,卡扣1301为圆环形,预留传输线缆11孔和第一换能器基阵1302位置;可实现传输线缆11和第一换能器基阵1302固定。
39.如图4所示,第一换能器基阵1302和第二换能器基阵401均为由一个收发合置换能器15和两个接收换能器14组成的“l”型三元基阵,收发合置换能器15位于基阵原点,两个接收换能器14分别位于基阵相互垂直的两个方向,同一方向的两个换能器的间距均为d(d为常规参数)。也就是说,合置换能器到两个接收换能器14的距离相等;两个接收换能器14与位于原点的收发合置换能器15构成平行于xoy平面的等腰直角三角形。
40.如图4所示,第一换能器基阵1302-应答器8定位原理为:以第一换能器基阵1302-1、中继信号站901及其上应答器801、802为例,收发合置换能器15主动发射询问信号,中继信号站901上的应答器801、1302接收到询问信号并回复应答信号,收发合置换能器15接收到应答信号并根据往返时间、计算出应答器801、802与换能器基阵原点15的距离,通过接收换能器14(非基阵原点)14接收信号的相位差计算得出基阵原点15接收的声线与两个相互垂直的基线的夹角。并将该信号数据传递通过传输线缆11传递给陆上控制中心,求出应答器801、802相对于第一换能器基阵1302的相对位置坐标,进一步根据应答器801、1202的绝对位置坐标求出第一换能器基阵1302的绝对位置坐标,以此定位管线12节点13的实时坐标;同理,节点13-1处的第一换能器基阵1302-1也会收到应答器803、804的应答信号。距离节点13-1最近的中继信号站9为901,其上应答器801、802回复的应答信号最先到达节点13处第一换能器基阵1302-1,因此为排除干扰,选取前2个应答信号定位。节点13-2的收发合置换能器15发射信号,并进行以上操作,直至所有节点13完成以上操作。
41.如图4所示, 应答器801相对于换能器基阵原点15的相对位置坐标为,,:,,;同理可求应答器802相对于换能器基阵原点15的坐标为,,。因为应答
器801、1202的绝对位置坐标为、,所以换能器基阵原点15的绝对坐标为: ,|,|;管道节点13-1的绝对坐标为,其中,d为管道直径,第二换能器基阵401-应答器8定位原理与第一换能器基阵1302-应答器8定位原理一致,不在赘述。
42.水下履带式arv4对海底管线12进行初步遥控浮游巡检,在海底管线12底面自主行走,在海底管线12侧面遥控行走,用其行进路线5表现海底管线12周围海床6形态,并且为中继信号站9补充电源;第二控制中心1用于分析水下履带式arv4传递的光学图像,调控arv4在遥控作业时的行进路线5,处理定位系统7获取的三维坐标位置,输出海床6表面形貌图,进而规划arv4行进路线5并传递给arv4。脐带缆3可以传递第二控制中心的指令、为水下履带式arv4补充电源。第一控制中心10用于控制第一换能器基阵1302发射询问信号,处理第一换能器基阵1302获取的信号数据,进一步获得实时管线12各节点13三维位置坐标,并输出管线12三维形态图,进而获得管线12屈曲变形情况。传输线缆11为第一换能器基阵1302提供电源并传递信号数据,沿管线12登陆,连接第二控制中心10并传递其指令。
43.如图1所示,作为一种实施方式,上述海底管线悬跨及屈曲变形水下探测设备还包括中继站2;中继站2分别与第二控制中心1、脐带缆3连接;中继站2可以实现水下履带式arv4的下放和停靠,补充电源及传输信息,根据自主/遥控作业需要回收/对接脐带缆3。具体的,中继站2可以为可伸缩中继站2。
44.如图8-9所示,水下履带式arv4用于对海底管线12进行初步巡检,并在海底管线12侧面和底部按照规划路径行走,用其行走过程的三维位置坐标绘制海底管线12悬跨三维图。如图7所示,作为一种实施方式,水下履带arv的高度小于0.2m,便于在海底管线12底部实施探测作业。水下履带arv的高度是指水下履带arv的上表面的最高位置到底表面的垂直距离。
45.如图7所示,水下履带式arv4包括脐带缆连接口403、抓手402、探测装置407、控制装置404、动力装置405、推进装置和履带装置409;脐带缆连接口403连接脐带缆3,脐带缆连接口403与中继信号站9充电接口适配;探测装置407包括高清摄像机、照明灯和前视声呐;控制装置404分别连接探测装置407、动力装置405、推进装置和第二换能器基阵401;推进装置连接履带装置409;动力装置405提供能源动力。脐带缆连接口403连接脐带缆3实现水下履带式arv4的遥控作业,脐带缆连接口403与脐带缆3断开的状态下与中继信号站9充电接口连接为中继信号站9充电。抓手402,用于连接传输线缆11和水下履带式arv4。探测装置407包括高清摄像机、照明灯和前视声呐,用于探测行进路线5前方海床6表面状况并识别障碍物。控制装置404连接探测装置407、动力装置405、推进装置和应答器8,控制水下履带式arv4沿规划路径形走,并根据探测装置407、第二换能器基阵401获得数据实时调整行进路
线501,到达中继站2时,控制装置404与第二控制中心通过中继站2的脐带缆3连接,第二控制中心输入新的指令到控制装置404。动力装置405为水下履带行进器提供行走、探测所需的能源动力,并为中继信号站9进行电力补充。推进装置用于协助推动水下履带行进器的运动,实现水下履带式arv4下放、上浮和浮游状态。所述第二换能器基阵401用于发射询问信号,并接收应答信号,完成水下履带式arv4定位工作。履带装置409为水下履带式arv4在海床6表面行进提供牵引力,位于水下履带式arv4两侧,便于水下履带式arv4在冲刷后复杂的海床6表面稳定行进。
46.如图7所示,作为一种具体实施方式,推进装置包括垂向推进器408和水平推进器406,垂向推进器408在水下履带式arv4两侧各安装2个,水平推进器406在水下履带式arv4尾部对称安装2个。
47.一种采用上述海底管线悬跨及屈曲变形水下探测设备的探测方法,其步骤为:(1)划分海底管线12节点13,节点13数量为;在卡扣1301上安装第一换能器基阵1302,并将卡扣1301安装于预设管线节点13;(2)安装中继信号站9,所述中继信号站9与海底管线12之间的距离大于安全距离,所述安全距离是指管线周围预估最大冲刷半径与中继信号站9周围预估最大冲刷半径之和;中继信号站9上安装应答器8,标记应答器8为、
……
,;并记录应答器8坐标为;(3)第一控制中心10发布指令,使第一换能器基阵1302依次发射询问信号,应答器8接收询问信号并发射应答信号,第一换能器基阵1302收到应答信号并将信号数据传递给第一控制中心10;第一控制中心10根据信号数据计算各节点13的绝对位置坐标,并将绝对位置坐标数据传递给第二控制中心;(4)第二控制中心根据各节点13的绝对位置坐标绘制管线三维形态图,并评估管线屈曲情况;第二控制中心根据管线各节点13绝对位置坐标初步规划水下履带式arv4的行进路线5;(5)水下履带式arv4连接脐带缆3并将水下履带式arv4投放至管线侧方;(6)水下履带式arv4在第二控制中心的控制下在管线侧方沿规划好的行进路线5行走,并根据探测装置407传回的图像调控前进方向和角度;(7)水下履带式arv4在行走的同时第二换能器基阵401发射询问信号,信号中继站2上的应答器8接收询问信号并发射应答信号,第二换能器基阵401接收应答信号并将信号数据传递给第二控制中心;(8)第二控制中心处理信号数据,求得水下履带式arv4的实时坐标数据,进而求出管线两侧的海床6形貌图;根据管线两侧海床6形貌图和探测装置407传回的图像规划出需要重点探测的悬跨区域,并规划自主作业路线;(9)水下履带式arv4关闭脐带缆3连接,根据预先设计好的自主作业路线沿悬跨的管线底部行走;(10)水下履带式arv4在管线底部行走的同时第二换能器基阵401发射询问信号,信号中继站2上的应答器8接收询问信号并发射应答信号,第二换能器基阵401接收应答信
号并将信号数据传递给第二控制中心;(11)第二控制中心处理信号数据,求得水下履带式arv4的实时坐标数据,进而求出管线底部的海床6形貌图;(12)结合管线两侧的海床6形貌图和管线底部的海床6形貌图,绘制管线周围整体海床6形态图,结合管线三维形态图,求得管线悬跨高度和悬跨长度。
48.上述探测方法,arv的投放方式可以采用多种方式实现。作为一种具体实施方式,arv的投放方式可以采用中继站2:连接脐带缆3并将水下履带式arv4放置在可伸缩中继站2上;母船缓缓下放中继站2至指定深度(该深度是本领域技术人员根据作业水深和工程水文条件确定的,属于常规技术手段),中继站2释放水下履带式arv4,水下履带式arv4降落至管线侧方。
49.如图8-9所示,作为上述探测方法的一种具体实施方式,水下履带式arv4行进路线501采取“ㄹ”状行走,行进路线5间距根据实际作业情况调整,采用插值方法计算已得到行进路线5之间的海床6形貌,实现高效探测。管线两侧行进路线501如图8所示,管线底部行进路线502如图9所示。
50.上述探测方法,所述中继信号站9与管线之间的距离可以根据具体情况进行选择。作为一种具体实施方式,所述中继信号站9与管线之间的距离是安全距离的1.5-2倍。
51.上述探测方法,步骤(7)或/和(9)重复进行三次以上,获得更加充足的行进数据以减少误差。作为一种具体实施方式,步骤(7)或/和(9)重复进行三次。
52.完成探测工作后,水下履带式arv4在第二控制中心的控制下收缩至水面母船;在有中继站2存在的情况下,水下履带式arv4停靠中继站2,中继站2携带履带式arv收缩至水面母船。
53.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1