一种整车电波暗室试验天线移动调节装置的制作方法
1.本实用新型涉及电磁兼容领域,特别涉及汽车整车半波暗室使用的试验天线,具体是一种整车电波暗室试验天线移动调节装置。
背景技术:
2.整车半波暗室是用来对各种整车及其电气、电子零部件进行电磁兼容认证检测的重要场地之一。屏蔽室是一个金属封闭体,存在大量的谐振频率,一旦被测设备的辐射频率和激励方式促使屏蔽室产生谐振时,测量误差可达20~30db,所以需要在屏蔽室的四周墙壁和顶部上安装吸波材料,使反射大大减弱,即电波传播时只有直达波和地面反射波。为保证试验准确度,半波暗室选择适合的吸波材料、场发生系统及屏蔽壳体形状,使无关能量在试验区域内降至限定值以下。
3.在整车辐射抗扰性试验要求中,天线高度和角度与车辆参考点呈三角函数关系。而搭建试验环境过程中,使用同轴电缆连接功率放大器和对数周期天线时,经常需要人为调整天线高度和角度。而人为调节,较为麻烦,且调整的高度、角度和与试验车辆的间距均不是很准确,因此,需要一种天线移动调节装置来代替人工调整,并提高调整的准确性。
技术实现要素:
4.鉴于以上内容,有必要提供一种整车电波暗室试验天线移动调节装置,以使天线的调整变成自动化,无需人工手动调节,且调整准确性高,能够实现微调。
5.为达到上述目的,本实用新型所采用的技术方案是:
6.一种整车电波暗室试验天线移动调节装置,包括底座和天线平台,所述底座包括上下叠置的上底座和下底座,所述上底座和下底座滑动设置,所述下底座的相对两侧均设置有前后距离调节装置,所述前后距离调节装置为气动伸缩结构,伸缩方向为所述底座的前后方向,所述前后距离调节装置的固定段安装在下底座上,伸缩端正对所述底座的前方,并与所述上底座连接,所述上底座在前后距离调节装置的作用下相对下底座前后移动;
7.所述上底座的顶部安装有高度升降装置,所述高度升降装置在底座的前后方向均设置有,所述高度升降装置为气动伸缩结构,伸缩方向为所述底座的上下方向,所述高度升降装置的顶部安装天线平台;
8.所述天线平台包括上下叠置的调节平台和放置平台,所述调节平台安装在高度升降装置上,所述放置平台用于放置天线,其一端与所述调节平台通过转轴转动连接,所述转轴连接气动式马达的输出轴,所述气动式马达安装在调节平台上,所述放置平台的另一端设置有滑块,所述滑块通过调节平台上的弧形导向口滑动穿设调节平台,所述弧形导向口的弧心位于转轴的转动中心线上,且所述弧形导向口和转轴沿着底座的前后方向依次设置;
9.还包括前端红外线感应器和底部红外线感应器;所述前端红外线感应器设置在上底座的前端,其感应部朝向所述底座的正前方;所述底部红外线感应器设置在天线平台的
底部,其感应部朝向所述底座;所述底部红外线感应器和前端红外线感应器、前后距离调节装置、高度升降装置、气动式马达均电连接外部中控系统。
10.优选的,所述下底座的底部设置有万向轮,所述万向轮带有刹车装置。
11.优选的,所述上底座的底部与前后距离调节装置的伸缩端固连,所述前后距离调节装置上滑动套设有滑动套,所述滑动套固定在上底座的底部。
12.优选的,所述气动式马达安装在调节平台的底部。
13.优选的,所述底部红外线感应器、前端红外线感应器、前后距离调节装置、高度升降装置和气动式马达均通过电缆连接外部中控系统。
14.与现有技术相比,本实用新型具有以下有益效果:
15.1、本实用新型能够实现天线高度、距离和角度的自动调节,无需人为调整,省时省力;
16.2、本实用新型的高度调节装置、前后距离调节装置和气动式马达均采用气动式结构,这使得天线位置的调节过程不会对电波暗室环境造成电磁兼容性能影响,也不会成为电波暗室内的固定干扰源,同时不会影响暗室的试验结果,亦不被暗室中进行的试验影响其性能。
附图说明
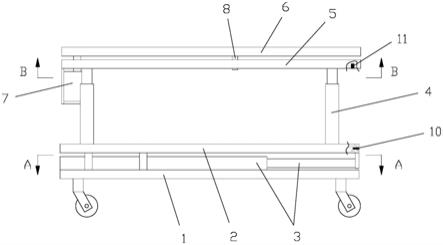
17.图1为本实用新型的结构示意图。
18.图2为图1的a-a向视图。
19.图3为图1的b-b向视图。
20.主要元件符号说明
21.图中:1为下底座,2为上底座,3为前后距离调节装置,4为高度升降装置,5为调节平台,6为放置平台,7为气动式马达,8为滑块,9为弧形导向口,10为前端红外线感应器, 11为底部红外线感应器。
22.如下具体实施方式将结合上述附图进一步说明本实用新型。
具体实施方式
23.请参阅图1-3,在本实用新型的一种较佳实施方式中,一种整车电波暗室试验天线移动调节装置,包括底座和天线平台,所述底座包括上下叠置的上底座2和下底座1,所述上底座2和下底座1滑动设置,所述下底座1的相对两侧均设置有前后距离调节装置3,所述前后距离调节装置3为气动伸缩结构,如气动式伸缩缸,伸缩方向为所述底座的前后方向,所述前后距离调节装置3的固定段安装在下底座1上,伸缩端正对所述底座的前方,并与所述上底座2连接,所述上底座2在前后距离调节装置3的作用下相对下底座1前后移动。优选的,所述下底座1的底部设置有万向轮,所述万向轮带有刹车装置,便于移动本装置并在移动后使得本装置固定,保持现有位置不动,便于后期调整天线的位置;所述上底座2的底部与前后距离调节装置3的伸缩端固连,所述前后距离调节装置3上滑动套设有滑动套,所述滑动套固定在上底座2的底部,以使得上底座2前后方向均有支撑,提高上底座2安装在下底座1上的稳定性。
24.所述上底座2的顶部安装有高度升降装置4,所述高度升降装置4在底座的前后方
向均设置有,所述高度升降装置4为气动伸缩结构,如气动式伸缩缸,伸缩方向为所述底座的上下方向,所述高度升降装置4的顶部安装天线平台,以通过高度升降装置4的升降作用调整天线平台的高度。在本实施方式中,所述高度升降装置4设置在上底座2顶部的四角落,以稳定支撑天线平台。
25.在本实用新型中,所述天线平台包括上下叠置的调节平台5和放置平台6,所述调节平台5安装在高度升降装置4上,所述放置平台6用于放置天线,其一端与所述调节平台5通过转轴转动连接,所述转轴连接气动式马达7的输出轴,所述气动式马达7安装在调节平台 5上,优选安装在调节平台5的底部,所述放置平台6的另一端设置有滑块8,所述滑块8通过调节平台5上的弧形导向口9滑动穿设调节平台5,所述弧形导向口9的弧心位于转轴的转动中心线上,且所述弧形导向口9和转轴沿着底座的前后方向依次设置,以通过气动式马达7驱动放置平台6相对调节平台5转动的方式使得放置平台6绕着转轴转动,从而调整天线的角度。
26.本实用新型的调节装置还包括前端红外线感应器10和底部红外线感应器11;所述前端红外线感应器10设置在上底座2的前端,其感应部朝向所述底座的正前方;所述底部红外线感应器11设置在天线平台的底部,其感应部朝向所述底座;所述底部红外线感应器11和前端红外线感应器10、前后距离调节装置3、高度升降装置4、气动式马达7均电连接外部中控系统,通过中控系统集中收集收据和控制,优选的,所述底部红外线感应器11、前端红外线感应器10、前后距离调节装置3、高度升降装置4和气动式马达7均通过电缆连接外部中控系统,以减少本转轴信号传输对试验的影响。
27.在本实用新型中,前端红外线感应器10朝向试验车,其用于测量本装置距离试验车的间距,具体是测量试验车至上底座2前端的间距,从而获知天线到试验车的间距,其传递的数据至中控系统,中控系统通过控制前后距离调节装置3的伸缩量来调整天线到试验车的间距。而底部红外线感应器11朝向底座,其用于测量天线平台至底座的间距,从而获知天线到地面的间距,其传递的数据至中控系统,中控系统通过控制高度升降装置4的伸缩量来调整天线到底面的间距,从而控制天线的高度。对于角度的调节,则是通过气动式马达7转动的角度来实现,例如,放置平台6初始位置为弧形导向口9的中部,该位置角度为零,需要调整角度时,正向则是气动式马达7正向转动,反向则是气动式马达7反向转动,具体的角度值则根据气动式马达7输出轴的旋转角度确定。
28.上述说明是针对本实用新型较佳可行实施例的详细说明,但实施例并非用以限定本实用新型的专利申请范围,凡本实用新型所提示的技术精神下所完成的同等变化或修饰变更,均应属于本实用新型所涵盖专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1