坡度液晶激光扫平仪的制作方法
1.本实用新型涉及扫平仪领域,特别涉及一种坡度液晶激光扫平仪。
背景技术:
2.扫平仪是用来确认水平面或者铅垂面的一种测量设备,有时也用于测量直线度,使用扫平仪可以大大降低施工找平的难度。
3.现有的扫平仪只能扫出水平面和铅垂面,不能扫出斜面。
技术实现要素:
4.本实用新型解决的技术问题是提供一种能够通过数字设置扫出斜面的坡度液晶激光扫平仪。
5.本实用新型解决其技术问题所采用的技术方案是:坡度液晶激光扫平仪,包括壳体、底座和设置在壳体与底座之间的摆体机构,所述摆体机构分别与壳体和底座固定连接,所述摆体机构包括固定设置在壳体内部的固定板,所述固定板的中心位置处设置有棱镜座,所述棱镜座内设置有镭射头,所述棱镜座的上端面上设置有棱镜,所述棱镜座的外表面固定连接有连接座,所述连接座的一侧上固定连接有用于驱动棱镜座转动的转动组件,所述连接座的一侧上固定连接有用于驱动连接座沿着x方向倾斜的x轴动力组件、用于驱动连接座沿着y轴方向倾斜的y轴动力组件,所述坡度液晶激光扫平仪还包括用于控制坡度液晶激光扫平仪的控制机构,所述转动组件、x轴动力组件和y轴动力组件分别与控制机构电气连接。
6.进一步的是:所述转动组件包括设置在连接座一端上的第一马达,所述第一马达的固定端与连接座固定连接,所述第一马达的驱动轴上连接有第一齿轮,所述第一齿轮的一侧啮合连接有第二齿轮,所述第二齿轮的内表面与棱镜座的外表面固定连接。
7.进一步的是:所述x轴动力组件包括固定连接在固定板上的第二马达,所述第二马达的固定端与固定板固定连接,所述第二马达的驱动轴上连接有第一螺杆,所述第一螺杆的外表面螺纹连接有第一螺母,所述第一螺母的上端上固定连接有第一上杆和第一下杆,所述第一上杆和第一下杆之间留有间隙,所述第一上杆和第一下杆之间设置有第一连接杆,所述第一连接杆的一端固定连接在连接座上,所述第一连接杆的另一端穿过第一上杆和第一下杆。
8.进一步的是:所述y轴动力组件包括固定连接在固定板上的第三马达,所述第三马达的固定端与固定板固定连接,所述第三马达的驱动轴上连接有第二螺杆,所述第二螺杆的外表面螺纹连接有第二螺母,所述第二螺母的上端面上固定连接有第二上杆和第二下杆,所述第二上杆和第二下杆之间留有间隙,所述第二上杆和第二下杆之间设置有第二连接杆,所述第二连接杆的一端固定连接在连接座上,所述第二连接杆的另一端穿过第二上杆和第二下杆。
9.进一步的是:所述棱镜为五角棱镜。
10.进一步的是:所述棱镜座下端的外表面固定连接有固定框,所述固定框的外侧设置有连接耳,所述连接耳上设置有通孔,所述固定板的边角处设置有连接柱,所述连接柱与连接耳的位置对应,所述连接耳与连接柱之间设置有弹簧,所述弹簧的一端钩住连接柱,所述弹簧的另一端钩住连接耳。
11.进一步的是:所述连接座上设置有用于检测马达转动速度的光栅,所述棱镜座的外表面位于第二齿轮的上方固定连接有锯齿轮。
12.进一步的是:所述控制机构包括控制面板,所述控制面板上设置有开/关键、开/关机状态指示灯、手动/自动安平模式键、手动/自动安平模式指示灯、防震模式键、防震模式键指示灯、调整转速键、定向扫描键、左步进键、右步进键、x方向坡度调整键和y方向坡度调整键。
13.进一步的是:所述镭射头的外侧位于壳体上设置有玻璃防护罩。
14.进一步的是:所述壳体的外侧设置有把手。
15.本实用新型的有益效果是:本实用新型可以通过数字设置来实现扫出一个斜面,解决了现有的扫平仪只能扫水平面和铅垂面的难题,拓宽了扫平仪的使用范围。本实用新型结构简单,操作方便。
附图说明
16.图1为坡度液晶激光扫平仪的整体结构示意图;
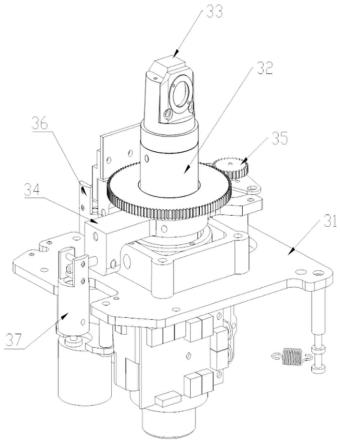
17.图2为摆体机构的结构示意图;
18.图3为转动组件的结构示意图;
19.图4为x轴动力组件和y轴动力组件的结构示意图;
20.图5为控制面板的示意图;
21.图中标记为:1、壳体;2、底座;3、摆体机构;12、把手;
22.32、棱镜座;33、棱镜;34、连接座;35、转动组件;36、x轴动力组件;37、y轴动力组件;38、连接柱;39、弹簧;
23.351、第一马达;352、第一齿轮;353、第二齿轮;
24.361、第二马达;362、第一螺杆;363、第一螺母;364、第一上杆;365、第一下杆;366、第一连接杆;
25.371、第三马达;372、第二螺杆;373、第二螺母;374、第二上杆;375、第二下杆;376、第二连接杆;
26.41、控制面板;411、开/关键;413、手动/自动安平模式键;415、防震模式键;417、调整转速键;418、定向扫描键;419、左步进键;420、右步进键;421、x方向坡度调整键;422、y方向坡度调整键。
具体实施方式
27.下面结合附图和具体实施方式对本实用新型进一步说明。
28.如图1、图2所示,本技术的实施例提供了一种坡度液晶激光扫平仪,该坡度液晶激光扫平仪包括壳体1、底座2和设置在壳体1与底座2之间的摆体机构3,所述摆体机构3分别与壳体1和底座2固定连接,所述摆体机构3包括固定设置在壳体1内部的固定板,所述固定
板的中心位置处设置有棱镜座32,所述棱镜座32内设置有镭射头,所述棱镜座32的上端面上设置有棱镜33,所述棱镜座32用于支撑棱镜33和镭射头,所述镭射头用于产生镭射,所述棱镜33用于分光。
29.所述棱镜座32的外表面固定连接有连接座34,所述连接座34的一侧上固定连接有用于驱动棱镜座32转动的转动组件35,所述连接座34的一侧上固定连接有用于驱动连接座34沿着x方向倾斜的x轴动力组件36、用于驱动连接座34沿着y轴方向倾斜的y轴动力组件37,所述转动组件35用于驱动棱镜座32转动,从而带动镭射头转动,使得发出的激光产生一个平面,所述x轴动力组件36用于驱动连接座34沿着x方向倾斜,使得形成的激光能够扫出一个沿着x轴方向倾斜的坡面,所述y轴动力组件37用于驱动连接座34沿着y轴方向倾斜,使得形成的激光能够扫出一个沿着y轴方向倾斜的坡面。
30.所述坡度液晶激光扫平仪还包括用于控制坡度液晶激光扫平仪的控制机构,所述转动组件35、x轴动力组件36和y轴动力组件37分别与控制机构电气连接,所述控制机构用于控制坡度液晶激光扫平仪。
31.在上述基础上,如图3所示,所述转动组件35包括设置在连接座34一端上的第一马达351,所述第一马达351的固定端与连接座34固定连接,所述第一马达351的驱动轴上连接有第一齿轮352,所述第一齿轮352的一侧啮合连接有第二齿轮353,所述第二齿轮353的内表面与棱镜座32的外表面固定连接。
32.所述第一马达351转动带动第一齿轮352转动,所述第一齿轮352转动带动第二齿轮353转动,所述第二齿轮353转动带动棱镜座32转动,从而带动镭射头和棱镜33转动,使得镭射头产生的激光在转动的过程中形成一个平面。
33.在上述基础上,如图4所示,所述x轴动力组件36包括固定连接在固定板上的第二马达361,所述第二马达361的固定端与固定板固定连接,所述第二马达361的驱动轴上连接有第一螺杆362,所述第一螺杆362的外表面螺纹连接有第一螺母363,所述第一螺母363的上端上固定连接有第一上杆364和第一下杆365,所述第一上杆364和第一下杆365之间留有间隙,所述第一上杆364和第一下杆365之间设置有第一连接杆366,所述第一连接杆366的一端固定连接在连接座34上,所述第一连接杆366的另一端穿过第一上杆364和第一下杆365。
34.所述第二马达361转动带动第一螺杆362转动,所述第一螺杆362转动带动第一螺母363转动,从而使得第一螺母363向上或向下移动,当第一螺母363向上移动时,第一下杆365抬着第一连接杆366向上移动,从而带动连接座34沿着x轴顺时针旋转,使得镭射头发出的激光在旋转的过程中形成一个坡面;
35.当第一螺母363向下移动时,所述第一上杆364压着第一连接杆366向下移动,从而带动连接座34沿着x轴逆时针旋转,使得镭射头发出的激光在旋转的过程中形成一个坡面;
36.在上述基础上,所述y轴动力组件37包括固定连接在固定板上的第三马达371,所述第三马达371的固定端与固定板固定连接,所述第三马达371的驱动轴上连接有第二螺杆372,所述第二螺杆372的外表面螺纹连接有第二螺母373,所述第二螺母373的上端面上固定连接有第二上杆374和第二下杆375,所述第二上杆374和第二下杆375之间留有间隙,所述第二上杆374和第二下杆375之间设置有第二连接杆376,所述第二连接杆376的一端固定连接在连接座34上,所述第二连接杆376的另一端穿过第二上杆374和第二下杆375。
37.所述第三马达371转动带动第二螺杆372转动,所述第二螺杆372转动带动第二螺母373向上或向下移动,当第二螺母373向上移动时,第二下杆375抬着第二连接杆376向上移动,从而带动连接座34沿着y轴顺时针旋转,使得镭射头发出的激光在旋转的过程中形成一个坡面;
38.当第二螺母373向下移动时,所述第二上杆374压着第二连接杆376向下移动,从而带动连接座34沿着y轴逆时针旋转,使得镭射头发出的激光在旋转的过程中形成一个坡面。
39.在上述基础上,所述棱镜33为五角棱镜。
40.在上述基础上,所述棱镜座32下端的外表面固定连接有固定框,所述固定框的外侧设置有连接耳,所述连接耳上设置有通孔,所述固定板的边角处设置有连接柱38,所述连接柱38与连接耳的位置对应,所述连接耳与连接柱38之间设置有弹簧39,所述弹簧39的一端钩住连接柱38,所述弹簧39的另一端钩住连接耳,通过弹簧39连接固定框和连接柱38用于防止棱镜座32在倾斜的过程中摆动。
41.在上述基础上,所述连接座34上设置有用于检测马达转动速度的光栅341,所述棱镜座32的外表面位于第二齿轮353的上方固定连接有锯齿轮。
42.所述光栅341根据单位时间内通过的锯齿数量,计算出当前锯齿轮的转速,然后再控制扫描第一马达351的占空比,就可以调整第一马达351的转速。
43.在上述基础上,如图5所示,所述控制机构包括控制面板41,所述控制面板41上设置有开/关键411、开/关机状态指示灯、手动/自动安平模式键413、手动/自动安平模式指示灯、防震模式键415、防震模式键指示灯、调整转速键417、定向扫描键418、左步进键419、右步进键420、x方向坡度调整键421和y方向坡度调整键422。
44.所述开/关键411用于控制坡度液晶激光扫平仪的开关机状态;在开/关机状态指示灯亮时,处于开机状态;灯闪烁时,坡度液晶激光扫平仪处于电源低压时。需对在机可充电电池充电。
45.所述手动/自动安平模式键413用于控制坡度液晶激光扫平仪处于手动模式或处于自动安平模式;
46.在所述手动/自动安平模式指示灯亮时,坡度液晶激光扫平仪处于手动模式,手动/自动安平模式指示灯闪烁时,仪器倾斜角度过大,处于报警状态;
47.所述防震模式键415用于防止仪器在安平状态下,因受到震动而产生位移。
48.在所述防震模式键指示灯慢闪时,坡度液晶激光扫平仪处于防震动模式,震模式键指示灯快闪时,仪器受到震动处于不安平状态。
49.所述调整转速键417将棱镜座32的转动速度由低至高分为5档,分别为0、60、120、300、600r.p.m。
50.所述定向扫描键418将激光扫描的宽度由小到大分为5档,分别为0
°
、-10
°
、-45
°
、-90
°
、-180
°
。
51.所述左步进键419用于在镭射头处于停止或定向扫描状态时,可控制镭射头按逆时针方向点动。
52.所述右步进键420用于在镭射头处于停止或定向扫描状态时,可控制镭射头按顺时针方向点动。
53.所述x方向坡度调整键421用于在仪器处于手动模式时:可在x方向上设置坡度。
54.所述y方向坡度调整键422用于在仪器处于手动模式时:可在y方向上设置坡度。
55.在上述基础上,所述镭射头的外侧位于壳体1上设置有玻璃防护罩,所述玻璃防护罩用于保护镭射头。
56.在上述基础上,所述壳体1的外侧设置有把手12,操作者手握把手12便于操作和移动本扫平仪。
57.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1