一种施工质量检测装置及方法与流程
1.本发明涉及建筑工程领域,尤其涉及一种施工质量检测装置及方法。
背景技术:
2.在进行建筑施工的过程中,常常需要浇灌混凝土,而在浇灌混凝土之前,常常需要支模。而对于部分需要支模才能够浇灌混凝土的施工而言,为了保证凝固后的混凝土的表面平整度和垂直度能够达到相关要求,故需要在支模完成后对模板表面的平整度和垂直度进行预先检验,而由于现在普遍采用的木质模板的安装比较复杂,从而使得其外观难以保持平整,继而使得传统的测量工具(如直尺、皮带尺)等难以对木模板的表面垂直度和平整度进行直接的检测,往往需要依靠人工使用铅锤和卷尺等工具的组合来进行检测,不仅费时费力,而且降低了检测效率,同时在测量是存在一定的人为误差,从而影响检测结果,突出了其不足之处。
技术实现要素:
3.本发明的目的在于提供一种施工质量检测装置及方法,以解决上述技术问题。
4.为实现上述目的本发明采用以下技术方案:一种施工质量检测装置,包括壳体、控制器、蓄电池、配重块、一号轴、二号轴、三号轴、左导向轮、右导向轮、左齿轮、支撑座、燕尾导轨、左穿线孔、右穿线孔、弹簧、绕线部分、测距部分,所述壳体呈圆柱状,所述壳体内部底端固定有控制器和蓄电池,所述壳体内部底端固定有多个不完全相同的配重块,所述壳体内部转动连接有一号轴、二号轴和三号轴,所述一号轴位于二号轴和三号轴的上方,所述二号轴位于三号轴的正前方,所述一号轴、二号轴和三号轴的左部分别轴向固定有左导向轮,且右部分别轴向固定有右导向轮和左齿轮,所述一号轴、三号轴和二号轴依次通过左齿轮啮合,且传动比为一比一比一,所述壳体内壁右端固定有支撑座,所述支撑座左端和壳体内壁右端对称固定有燕尾导轨,所述壳体上部从左到右依次贯穿有左穿线孔和右穿线孔,且顶端固定有两弹簧,两所述弹簧所在的轴心与左穿线孔和右穿线孔所在的轴心共轴,所述壳体内部和上方安装有绕线部分,且下方安装有测距部分。
5.在上述技术方案基础上,所述绕线部分包括滑动座、导向架、左导向腔、右导向腔、四号轴、三号锥齿轮、螺筒、绞筒、光孔、左吊装绳、右吊装绳、扁担、吊装孔、挂钩、传动筒、光杆、五号轴、右齿轮、一号锥齿轮、双杆电机、不完全锥齿轮、二号锥齿轮,两所述燕尾导轨分别滑动连接有滑动座,两所述滑动座共同转动连接有导向架,所述导向架左部贯穿有左导向腔,且右部贯穿有右导向腔,所述壳体底部转动连接有四号轴,所述四号轴右部对称固定有两个三号锥齿轮,且外壁螺纹连接有螺筒,所述螺筒外壁转动连接有绞筒,所述绞筒轴向贯穿有多个光孔,且外壁紧凑螺旋缠绕有左吊装绳和右吊装绳,所述左吊装绳和右吊装绳共同固定有扁担,所述扁担中部贯穿有吊装孔,且顶端固定有挂钩,所述壳体左部转动连接有传动筒,所述传动筒右端固定有多个光杆,各所述光杆与光孔相滑动连接,所述支撑座上
部转动连接有五号轴,所述五号轴右部和一号轴右部分别轴向固定有右齿轮,且右部轴向固定有一号锥齿轮,所述支撑座底部顶端固定有双杆电机,所述双杆电机的转轴底部轴向固定有不完全锥齿轮,且转轴上部轴向固定有二号锥齿轮。
6.在上述技术方案基础上,所述测距部分包括轴承座、摆动架、配重锤、安装槽、红外测距传感器,所述壳体底端前后方向是对称固定有两轴承座,两所述轴承座转动连接有摆动架,所述摆动架底端固定有配重锤,所述配重锤为回转几何体结构,且在重力作用下其回转轴能够与壳体的回转轴相重合,所述配重锤左右两部对称开有两安装槽,两所述安装槽内分别安装有红外测距传感器,所述红外测距传感器发出的红外线朝向斜前方,所述摆动架、配重锤和红外测距传感器作为一个整体的重心位于配重锤的回转轴上,两所述红外测距传感器工作时发出的红外线相交且垂直,且在重力作用下其发出的红外线能够同时与水平面相平行。
7.在上述技术方案基础上,所述左吊装绳和右吊装绳尺寸、材料和结构均相同,所述传动筒与三号轴之间通过皮带和皮带轮进行传动比为一比一的开口带传动,两所述右齿轮相啮合,所述双杆电机的转轴与支撑座间隙插接,所述不完全锥齿轮与两三号锥齿轮保持交替啮合,所述二号锥齿轮与一号锥齿轮相啮合,所述左吊装绳和右吊装绳保持并列,且从绞筒后方向上引出后从下至上与左导向腔和右导向腔相间隙插接,所述左吊装绳从左导向腔引出后依次经过二号轴的左导向轮的前部和上部外圆周壁、三号轴的左导向轮的底部和后部外圆周壁和一号轴的左导向轮的前部外圆周壁后从左穿线孔引出,所述右吊装绳从右导向腔引出后依次经过二号轴的右导向轮的前部和上部外圆周壁、三号轴的右导向轮的后部和底部外圆周壁和一号轴的右导向轮前部外圆周壁后从右穿线孔引出,所述吊装孔在自然状态下与外界杆状物相间隙插接时壳体内部及其上方所有构件作为一个整体的重心位于壳体的回转轴上,所述挂钩在自然状态下与外界杆状物相搭接时壳体内部及其上方所有构件作为一个整体的重心位于壳体的回转轴上。
8.在上述技术方案基础上,所述控制器、蓄电池、双杆电机和红外测距传感器电性连接,所述控制器通过无线遥控设备进行控制,所述滑动座能够沿着燕尾导轨前后滑动,所述双杆电机通过控制器的控制能够正向转动和反向转动,所述双杆电机在正向转动和反向转动时通过不完全锥齿轮能够使得两个三号锥齿轮交替转动,且转动时通过一号锥齿轮能够使得五号轴进行转动,所述五号轴在转动时通过右齿轮、左齿轮、皮带和皮带轮能够使得一号轴、二号轴、三号轴和传动筒进行转动,所述传动筒在转动的过程中通过光杆和光孔能够使得绞筒进行转动,两所述三号锥齿轮在不完全锥齿轮的驱动下进行交替转动时的方向相反,且转动时通过带动四号轴的往复正反转动能够使得螺筒沿着四号轴进行轴向往复移动,所述螺筒在沿着四号轴进行轴向往复移动时能够使得绞筒沿着光杆进行往复滑动。
9.与现有技术相比,本发明具有以下优点:本发明能够利用红外测距传感器自动且实时检测到模板之间的距离,然后控制器再利用“勾股定理”和“直角三角形的面积”的数学计算,从而能够实时计算出配重锤回转轴到模板表面的距离,然后再通过控制器内部的算法自动过滤干扰数据(如模板表面的木杆等干扰物对测量数据造成的明显干扰),即可对计算得到的有效的配重锤回转轴到模板之间的距离数据进行比较,从而得知模板的垂直度和平整度是否满足需求,而在对左吊装绳和右吊装绳进行收放的过程中,绞筒始终一边旋转一边沿着光杆往复移动,继而能够将左吊装绳和右吊装绳逐渐收放,同时再辅以导向架的
引导,从而能够有效避免左吊装绳和右吊装绳相互缠绕,继而能够保证工作顺畅。
附图说明
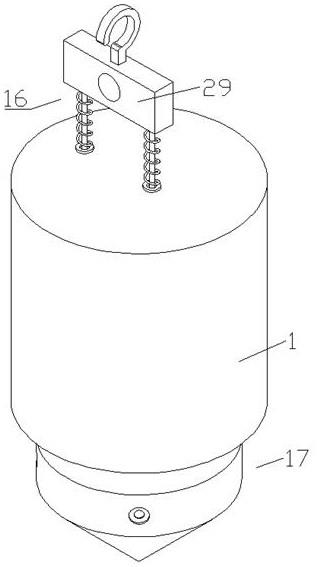
10.图1为本发明的结构示意图。
11.图2为本发明壳体的内部结构示意图。
12.图3为本发明左齿轮的啮合示意图。
13.图4为本发明导向架的前剖结构示意图。
14.图5为本发明壳体的右剖结构示意图。
15.图6为本发明配重锤的安装示意图。
16.图7为本发明配重锤的上剖结构示意图。
17.图中:1、壳体,2、控制器,3、蓄电池,4、配重块,5、一号轴,6、二号轴,7、三号轴,8、左导向轮,9、右导向轮,10、左齿轮,11、支撑座,12、燕尾导轨,13、左穿线孔,14、右穿线孔,15、弹簧,16、绕线部分,17、测距部分,18、滑动座,19、导向架,20、左导向腔,21、右导向腔,22、四号轴,23、三号锥齿轮,24、螺筒,25、绞筒,26、光孔,27、左吊装绳,28、右吊装绳,29、扁担,30、吊装孔,31、挂钩,32、传动筒,33、光杆,34、五号轴,35、右齿轮,36、一号锥齿轮,37、双杆电机,38、不完全锥齿轮,39、二号锥齿轮,40、轴承座,41、摆动架,42、配重锤,43、安装槽,44、红外测距传感器。
具体实施方式
18.下面结合附图和具体实施例对本发明作进一步详细阐述。
19.如图1-7所示,一种施工质量检测装置,包括壳体1、控制器2、蓄电池3、配重块4、一号轴5、二号轴6、三号轴7、左导向轮8、右导向轮9、左齿轮10、支撑座11、燕尾导轨12、左穿线孔13、右穿线孔14、弹簧15、绕线部分16、测距部分17,所述壳体1呈圆柱状,所述壳体1内部底端固定有控制器2和蓄电池3,所述壳体1内部底端固定有多个不完全相同的配重块4,多个不完全相同的配重块是为了使得在自然悬挂状态下本装置的重心线能够与壳体1和配重锤42的回转轴重合,所述壳体1内部转动连接有一号轴5、二号轴6和三号轴7,所述一号轴5位于二号轴6和三号轴7的上方,所述二号轴6位于三号轴7的正前方,所述一号轴5、二号轴6和三号轴7的左部分别轴向固定有左导向轮8,且右部分别轴向固定有右导向轮9和左齿轮10,所述一号轴5、三号轴7和二号轴6依次通过左齿轮10啮合,且传动比为一比一比一,所述壳体1内壁右端固定有支撑座11,所述支撑座11左端和壳体1内壁右端对称固定有燕尾导轨12,所述壳体1上部从左到右依次贯穿有左穿线孔13和右穿线孔14,且顶端固定有两弹簧15,两所述弹簧15所在的轴心与左穿线孔13和右穿线孔14所在的轴心共轴,所述壳体1内部和上方安装有绕线部分16,且下方安装有测距部分17。
20.所述绕线部分16包括滑动座18、导向架19、左导向腔20、右导向腔21、四号轴22、三号锥齿轮23、螺筒24、绞筒25、光孔26、左吊装绳27、右吊装绳28、扁担29、吊装孔30、挂钩31、传动筒32、光杆33、五号轴34、右齿轮35、一号锥齿轮36、双杆电机37、不完全锥齿轮38、二号锥齿轮39,两所述燕尾导轨12分别滑动连接有滑动座18,两所述滑动座18共同转动连接有导向架19,滑动的滑动座和转动的导向架19能够对左吊装绳27和右吊装绳28进行更佳的引导,从而保证绞筒25对左吊装绳27和右吊装绳28收放的顺畅,而左吊装绳27和右吊装绳28
在被壳体1内部及其下方的构件的重力牵拉而绷直时,即能够使得壳体1和配重锤42的周向角度趋于稳定,继而减少红外传感器44的周向摆动,所述导向架19左部贯穿有左导向腔20,且右部贯穿有右导向腔21,所述壳体1底部转动连接有四号轴22,所述四号轴22右部对称固定有两个三号锥齿轮23,且外壁螺纹连接有螺筒24,所述螺筒24外壁转动连接有绞筒25,所述绞筒25轴向贯穿有多个光孔26,且外壁紧凑螺旋缠绕有左吊装绳27和右吊装绳28,所述左吊装绳27和右吊装绳28共同固定有扁担29,所述扁担29中部贯穿有吊装孔30,且顶端固定有挂钩31,所述吊装孔30和挂钩31是为了更加方便对本装置进行悬挂,所述壳体1左部转动连接有传动筒32,所述传动筒32右端固定有多个光杆33,各所述光杆33与光孔26相滑动连接,所述支撑座11上部转动连接有五号轴34,所述五号轴34右部和一号轴5右部分别轴向固定有右齿轮35,且右部轴向固定有一号锥齿轮36,所述支撑座11底部顶端固定有双杆电机37,所述双杆电机37的转轴底部轴向固定有不完全锥齿轮38,且转轴上部轴向固定有二号锥齿轮39。
21.所述测距部分17包括轴承座40、摆动架41、配重锤42、安装槽43、红外测距传感器44,所述壳体1底端前后方向是对称固定有两轴承座40,两所述轴承座40转动连接有摆动架41,转动的摆动架41在重力的作用下能够使得回转轴与其重心线相重合,从而能够使得配重锤42内部的红外测距传感器44所在的平面趋于水平,所述摆动架41底端固定有配重锤42,所述配重锤42为回转几何体结构,且在重力作用下其回转轴能够与壳体1的回转轴相重合,所述配重锤42左右两部对称开有两安装槽43,两所述安装槽43内分别安装有红外测距传感器44,所述红外测距传感器44发出的红外线朝向斜前方,所述摆动架41、配重锤42和红外测距传感器44作为一个整体的重心位于配重锤42的回转轴上,两所述红外测距传感器44工作时发出的红外线相交且垂直,且在重力作用下其发出的红外线能够同时与水平面相平行。
22.所述左吊装绳27和右吊装绳28尺寸、材料和结构均相同,所述传动筒32与三号轴7之间通过皮带和皮带轮进行传动比为一比一的开口带传动,两所述右齿轮35相啮合,所述双杆电机37的转轴与支撑座11间隙插接,所述不完全锥齿轮38与两三号锥齿轮23保持交替啮合,所述二号锥齿轮39与一号锥齿轮36相啮合,所述左吊装绳27和右吊装绳28保持并列,从而使得缠绕得更加紧凑,避免因不紧凑而造成左吊装绳27和右吊装绳28的收放不同步,所述左吊装绳27和右吊装绳28从绞筒25后方向上引出后从下至上与左导向腔20和右导向腔21相间隙插接,所述左吊装绳27从左导向腔20引出后依次经过二号轴6的左导向轮8的前部和上部外圆周壁、三号轴7的左导向轮8的底部和后部外圆周壁和一号轴5的左导向轮8的前部外圆周壁后从左穿线孔13引出,所述右吊装绳28从右导向腔21引出后依次经过二号轴6的右导向轮9的前部和上部外圆周壁、三号轴7的右导向轮9的后部和底部外圆周壁和一号轴5的右导向轮9前部外圆周壁后从右穿线孔14引出,所述吊装孔30在自然状态下与外界杆状物相间隙插接时壳体1内部及其上方所有构件作为一个整体的重心位于壳体1的回转轴上,所述挂钩31在自然状态下与外界杆状物相搭接时壳体1内部及其上方所有构件作为一个整体的重心位于壳体1的回转轴上。
23.所述控制器2、蓄电池3、双杆电机37和红外测距传感器44电性连接,所述控制器2通过无线遥控设备进行控制,所述滑动座18能够沿着燕尾导轨12前后滑动,所述双杆电机37通过控制器2的控制能够正向转动和反向转动,所述双杆电机37在正向转动和反向转动
时通过不完全锥齿轮38能够使得两个三号锥齿轮23交替转动,且转动时通过一号锥齿轮36能够使得五号轴34进行转动,所述五号轴34在转动时通过右齿轮35、左齿轮10、皮带和皮带轮能够使得一号轴5、二号轴6、三号轴7和传动筒32进行转动,所述传动筒32在转动的过程中通过光杆33和光孔26能够使得绞筒25进行转动,两所述三号锥齿轮23在不完全锥齿轮38的驱动下进行交替转动时的方向相反,且转动时通过带动四号轴22的往复正反转动能够使得螺筒24沿着四号轴22进行轴向往复移动,所述螺筒24在沿着四号轴22进行轴向往复移动时能够使得绞筒25沿着光杆33进行往复滑动。
24.利用本发明施工质量检测装置的检测方法:初始时绞筒25对左吊装绳27和右吊装绳28进行适当收绞,左吊装绳27和右吊装绳28并列呈螺旋状缠绕在绞筒25外壁,两弹簧15被扁担29进行弹性挤压,从而使得左吊装绳27和右吊装绳28处于绷直状态,在无风或微风状态下,当需要检测模板的垂直度和平整度时,通过吊装孔30或挂钩31将本装置悬挂于待测模板对面位置的适当高度处,并使得两红外测距传感器44面向待测模板,此时本装置的重心线与壳体1的回转轴和配重锤42的回转轴相重合,随后通过外部无线遥控设备对控制器2进行控制,从而使得双杆电机37进行正转(从俯视角度观察为顺时针转动),继而通过二号锥齿轮39、一号锥齿轮36、右齿轮35和左齿轮10间接带动一号轴5和二号轴6进行顺时针转动(从右向左观察),同时会通过二号锥齿轮39、一号锥齿轮36、右齿轮35、左齿轮10、皮带、皮带轮、传动筒32和光杆33间接带动三号轴7和四号轴22进行逆时针转动(从右向左观察),从而能够逐渐将左吊装绳27和右吊装绳28放出,与此同时,由于不完全锥齿轮38与三号锥齿轮23的交替啮合,能够间接使得绞筒25沿着光杆33进行往复滑动,从而能够逐步对左吊装绳27和右吊装绳28进行释放,继而避免左吊装绳27和右吊装绳28发生缠绕,而左吊装绳27和右吊装绳28在逐步释放的过程中,壳体1和配重锤42会逐步下降,而红外测距传感器44随着配重锤42的逐步下降能够实时测量到模板之间的距离,即使因为左吊装绳27和右吊装绳28的放线不同步的误差而造成壳体1和配重锤42的回转轴不重合时,两红外测距传感器44发出的红外线也会相互垂直且始终垂直于配重锤42的回转轴,故控制器2能够利用“勾股定理”的数学计算方法(在直角三角形中,两直角边的平方和等于斜边的平方)求得红外线在模板上照射出的两点之间的直线距离(即“斜边”长度),随后控制器2能够利用“直角三角形的面积”的数学计算方法(直角三角形的面积等于二分之一的两直角边的乘积,也等于二分之一的斜边与斜边上的高的乘积)求得配重锤42的回转轴到模板之间的距离(即“斜边”上的高),而随着红外测距传感器44所测数据的实时更新则能够实时更新计算得到的配重锤42的回转轴到模板之间的距离,然后再通过控制器2内部的算法自动过滤干扰数据(如模板表面的木杆等干扰物对测量数据造成的明显干扰),即可对计算得到的有效的配重锤42的回转轴到模板之间的距离进行比较,从而得知模板的垂直度和平整度是否满足需求,继而实现了自动检测的目的,待配重锤42下降到一定高度后即可通过外部无线遥控设备对控制器2进行反向控制,从而使得双杆电机37、一号轴5、二号轴6、三号轴7、四号轴22、五号轴34和绞筒25行反向转动,同时使得绞筒25反向沿着光杆33左右滑动,从而能够逐步对左吊装绳27和右吊装绳28进行缠绕,继而避免左吊装绳27和右吊装绳28发生缠绕,并最终重新使得扁担29对弹簧15进行弹性挤压即可。
25.以上所述为本发明较佳实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变
型仍落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1