一种利用爬壁机器人污染源识别及信息处理系统的制作方法
1.本发明涉及污染源的探测和处理技术领域,具体为一种利用爬壁机器人污染源识别及信息处理系统。
背景技术:
2.污染源监测是一种环境监测内容,主要采用环境监测手段确定污染物的排放来源、排放浓度、污染物种类等,为控制污染源排放和环境影响评价提供依据,同时也是解决污染纠纷的主要依据。该系统通过爬壁机器人上的探测器对污染源进行探测识别,并将污染源的信息进行处理。
3.这种现有技术方案在使用时还存在以下技术缺陷:
4.爬壁机器人在信号探测后通过人们回收爬壁机器人,之后对爬壁机器人上的数据进行获取,从而得到污染源的数据,此方法获取机器人容易出现丢失的情况,并且不能够第一时间获取探测的信息。
5.所以需要针对上述问题进行技术升级,来满足市场需求。
技术实现要素:
6.本发明的目的在于提供一种利用爬壁机器人污染源识别及信息处理系统,以解决上述背景技术中提出爬壁机器人在信号探测后通过人们回收爬壁机器人,之后对爬壁机器人上的数据进行获取,从而得到污染源的数据,此方法获取机器人容易出现丢失的情况,并且不能够第一时间获取探测的信息的问题。
7.为实现上述目的,本发明提供如下技术方案:一种利用爬壁机器人污染源识别及信息处理系统,包括:若干个呈陈列拼装设置在机器人底部的检测单元、用于系统控制的mcu以及用于显示的系统主机;
8.还包括:
9.所述信息处理系统连接远端的遥控器内的系统主机,所述信息处理系统包括运动控制单元、检测单元、无线传输单元、传感器单元、视觉单元以及远程操控单元;
10.其中,信息处理系统的内部嵌入式设置有控制单元,且信息处理系统连接位于远端的遥控器上的操控屏;
11.所述检测单元为设置在机器人底部的辐射量检测模块;其中,辐射量检测模块的内部呈大批量阵列式钝化注入硅半导体探测器,其中探测器的背面加工有多个m2的半深螺丝盲孔,对其进行安装和固定;
12.前放模块,所述前放模块设置在硅半导体探测器的内部,且前放模块基于处理模块通过脉冲信号与mcu之间连接;其中,所述mcu通过通讯光缆连接主机;所述辐射探测器用于探测α、β射线;
13.所述前放模块对钝化注入硅半导体探测器接收到的辐射信号进行转换,输出随辐射性能变化的电压脉冲信号;
14.所述探测器输出信号经过前放模块iv转换、整形、滤波和放大后输出到mcu进行信号处理;其中,所述钝化注入硅半导体探测器单元由钝化注入硅半导体探测器和灵敏电荷电路组成。
15.优选的,所述前放模块连接高压模块进行电路电力输入,且探测器高压模块通过偏置电路经过shv电缆进行连接进行电流输出;
16.其中偏置电路由100m高压电阻和高压电容组成,可以对输出直流高压进行保护和滤波,减少对探测器的损害,且输出高压进入高压电路连接两组高压电阻与电容连接,且电容直接连接地线,同时电容与相近电阻之间连接有一组高压电阻进行保护。
17.优选的,所述前放模块还设置有输入保护电路,且输入保护电路接收输入shv电缆短路或者输入残余电荷;
18.其中,输入保护电路包括有两组电阻、两组电容以及pnp型晶体管,且第一电阻与第二电阻之间连接构成两端,且第一电阻一端连接电流,第二电阻一端连接地线;
19.所述第一电阻与第二电阻之间并联有两组电容,且两组电容量分别为10uf和0.1uf的电容用于滤波放大,并且两组电容的外侧并联有同时与第一电阻之间耦合的pnp型晶体管;
20.同时,所述两组电容并联同时连接地线,所述pnp型晶体管通过连接电阻后连接地线,且pnp型晶体管同时与电容通路之间构成通路。
21.优选的,所述前放模块内部设置有整形滤波电路,且整形滤波电路采用低波滤波电路,同时加装光敏二极管,以减小输出信号脉冲宽度,提高α/β探头的时间分辨能力,且探测器输出信号首先经过cr微分电路整形后,减少了脉冲快读,再经过有源带通滤波器组成的滤波电路;
22.其中低波滤波电路包括运算放大器、电阻、电容和光敏二极管,且运算放大器同相输入端连接地线,运算反相输入端与输出端之间连接并联设置的电阻和电容,且运算放大器反相输入端连接有光敏二极管,且单向输入端远端连接地线。
23.优选的,所述前放模块内部还设置有积分电路和甄别电路,且输出信号经积分电路后采用脉冲幅度甄别的方式将α粒子和β粒子脉冲区分开来;
24.其中整形滤波电路整体由cr微分电路连接低波滤波电路构成;积分电路采用反相积分电路,其输入信号经过了一个电阻后经过反馈流到电容上;
25.其中甄别电路输入端一侧依次两个电位器rv3和rv1进行输出,且同侧连接运算放大器au,此运算放大器依次连接两个电位器rv4和rv2,其中电位器rv1和电位器rv2之间连接有电阻r1,所述运算放大器au连接电阻r2后与运算放大器du连接输出上阈电流vu;
26.其中甄别电路输入端另一侧连接电阻后连接运算放大器al输出下阈vl,且下阈vl电流连接电阻r2后与运算放大器dl连接输出下阈电压vl,且下阈电压vl连接非门逻辑电路后通过与非门逻辑电路进行电流输出,并且下阈电压vl连接非门后同时连接或非门逻辑电路进行电流输出。
27.优选的,所述前放模块通过电荷灵敏放大电路是输出信号成型,且电荷灵敏放大电路由第一级iv变换电路和第二级信号放大电路组成;
28.其中iv转换是将待测量的微弱电流信号,转换并放大为一个幅值较大的电压信号,测量转换得到的电压信号获得待测微弱电流信号大小,所述待测微弱电流信号转换的
过程中,设置一个高阻值电阻rf作为反馈组件。
29.优选的,所述信号iv转换电路的输出电压v0可近似为:
[0030]v0
=if×
if=ii×af
=-ii×
rf[0031]
其中,v0为输出电压,if为反馈电流,rf为反馈电阻,ii为待测输入电流;
[0032]
待测电流ii可表示为:ii=-v0/rf[0033]
所述待测微弱电流的放大倍数通过反馈组件rf决定,所述反馈组件的大小在109~10
12
ω。
[0034]
优选的,所述前放模块的信号成型采用低噪音电流型运算放大器,所述运算放大器的工作电压范围是4.5v-16v,且运算放大器采用5v和10v单电源以及
±
2.5v和
±
5v双电源系统供电,所述低噪音电流型运算放大器的型号为ad8011,所述ad8011输出的电压信号通过rc处理后送到比较器。
[0035]
优选的,所述前放模块的pcb布局设计采用保护环方式,所述pcb布局设计的过程中采用模拟信号部分和数字信号部分单点通过磁珠连接的方式进行隔离,所述保护环是覆铜形状,所述保护环可完全包围从传感器连接到同相输入的高阻抗走线;
[0036]
所述前放模块通过脉冲信号连接信号处理模块与mcu之间交互,且信号处理模块对钝化注入硅半导体探测器探测到的辐射信号进行处理。
[0037]
优选的,所述信息处理系统传感器单元包括速度传感器、电感传感器、激光传感器以及北斗定位模块,用于获取位置、速度信息;
[0038]
所述信息处理系统视觉单元为固定在机器人顶部位置的6目全方位红外摄像机;
[0039]
所述信息处理系统信息处理系统通过无线传输单元连接军用电脑构成远程操控。
[0040]
与现有技术相比,本发明的有益效果是:该利用爬壁机器人污染源识别及信息处理系统,可实现对污染源进行探测识别,并对探测的信息数据进行处理。
[0041]
通过辐射探测器进行辐射信号的探测,之后将信号传输到前放模块,,前放模块对辐射信号进行iv转换、整形、滤波和放大,之后通过信号处理模块对辐射信号进行处理,再通过系统控制单元对数据进行处理后传输到系统显示单元上,从而实现对污染源进行探测识别,并对探测的信息数据进行处理,同时信息处理系统各单元分布安装在机器人不同位置,便于进行信息的收集使用,方便进行及时有效的进行信息处理工作,保证探测使用。
附图说明
[0042]
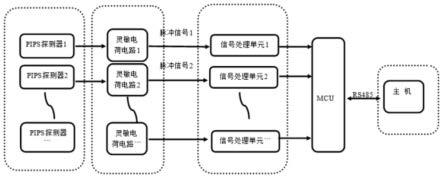
图1为本发明系统组成示意图;
[0043]
图2为本发明前放模块供电设计框图示意图;
[0044]
图3为本发明am241测试灵敏电荷电路示意图;
[0045]
图4为本发明探测器偏置输入示意图;
[0046]
图5为本发明输入保护电路示意图;
[0047]
图6为本发明iv转换运放示意图;
[0048]
图7为本发明探测器信号与温度变化示意图;
[0049]
图8为本发明整形滤波电路示意图;
[0050]
图9为本发明积分电路示意图;
[0051]
图10为本发明甄别电路单道脉冲幅度分析器信号输入输出示意图;
[0052]
图11为本发明单道脉冲幅度分析器原理示意图;
[0053]
图12为本发明信息处理系统构架示意图;
[0054]
图13为本发明机器人示意图。
具体实施方式
[0055]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0056]
请参阅图1-13,本发明提供一种技术方案:一种利用爬壁机器人污染源识别及信息处理系统,包括:若干个呈陈列拼装设置在机器人底部的检测单元、用于系统控制的mcu以及用于显示的系统主机;
[0057]
所述信息处理系统连接远端的遥控器内的系统主机,所述信息处理系统包括运动控制单元、检测单元、无线传输单元、传感器单元、视觉单元以及远程操控单元;其中,信息处理系统的内部嵌入式设置有控制单元,且信息处理系统连接位于远端的遥控器上的操控屏;
[0058]
所述检测单元为设置在机器人底部的辐射量检测模块;其中,辐射量检测模块的内部呈大批量阵列式钝化注入硅半导体探测器,其中探测器的背面加工有多个m2的半深螺丝盲孔,对其进行安装和固定;所述前放模块设置在硅半导体探测器的内部,且前放模块基于处理模块通过脉冲信号与mcu之间连接;其中,所述mcu通过通讯光缆连接主机;所述辐射探测器用于探测α、β射线;所述前放模块对钝化注入硅半导体探测器接收到的辐射信号进行转换,输出随辐射性能变化的电压脉冲信号;
[0059]
所述探测器输出信号经过前放模块iv转换、整形、滤波和放大后输出到mcu进行信号处理;其中,所述钝化注入硅半导体探测器单元由钝化注入硅半导体探测器和灵敏电荷电路组成。
[0060]
为提高设备的便携性和稳定性为目的,对钝化注入硅半导体探测器使用低噪音的灵敏电荷电路,电路采用高性能集成运放的方式,极大地降低了调试难度。使用am241源对探测器进行测试,系统信噪比大于20:1。am241源经灵敏电荷电路处理后的信号如图3中所示;
[0061]
所述前放模块连接高压模块进行电路电力输入,且探测器高压模块通过偏置电路经过shv电缆进行连接进行电流输出;
[0062]
其中偏置电路由100m高压电阻和高压电容组成,可以对输出直流高压进行保护和滤波,减少对探测器的损害,且输出高压进入高压电路连接两组高压电阻与电容连接,且电容直接连接地线,同时电容与相近电阻之间连接有一组高压电阻进行保护;同时,所述前放模块还设置有输入保护电路,且输入保护电路接收输入shv电缆短路或者输入残余电荷,其电路如图4中所示,
[0063]
同时,所述前放模块还设置有输入保护电路,探测器偏置高压产生的瞬时冲击,输入shv电缆短路或者输入残余电荷的泄放都可能对电荷灵敏放大电路输入的fet晶体管和探测器造成损坏。输入保护电路可以对上述损坏进行有效保护,输入保护电路虽然可以对
fet晶体管和探测器进行保护,布线处理不当也可能会对运放放大器输入端产生额外的噪音干扰,其电路如图5所示。
[0064]
其中,输入保护电路包括有两组电阻、两组电容以及pnp型晶体管,且第一电阻与第二电阻之间连接构成两端,且第一电阻一端连接电流,第二电阻一端连接地线;
[0065]
所述第一电阻与第二电阻之间并联有两组电容,且两组电容量分别为10uf和0.1uf的电容用于滤波放大,并且两组电容的外侧并联有同时与第一电阻之间耦合的pnp型晶体管;
[0066]
同时,所述两组电容并联同时连接地线,所述pnp型晶体管通过连接电阻后连接地线,且pnp型晶体管同时与电容通路之间构成通路;
[0067]
所述前放模块通过电荷灵敏放大电路是输出信号成型,且电荷灵敏放大电路由第一级iv变换电路和第二级信号放大电路组成;其中iv转换是将待测量的微弱电流信号,转换并放大为一个幅值较大的电压信号,测量转换得到的电压信号获得待测微弱电流信号大小,所述待测微弱电流信号转换的过程中,设置一个高阻值电阻rf作为反馈组件。
[0068]
所述信号iv转换电路的输出电压v0可近似为:
[0069]v0
=if×
if=ii×af
=-ii×
rf[0070]
其中,v0为输出电压,if为反馈电流,rf为反馈电阻,ii为待测输入电流;
[0071]
待测电流ii可表示为:ii=-v0/rf;
[0072]
所述待测微弱电流的放大倍数通过反馈组件rf决定,所述反馈组件的大小在109~10
12
ω。
[0073]
在具体的应用场景中,当待测电流信号很小(小于pa或fa级时),要将其放大到便于测量的mv级电压时,必须使用高阻值的反馈电阻,其值往往是在109~1012欧。同时应当选取高输入电阻与极低偏置电流的运算放大器,以防止偏置电流的噪声淹没输入待测电流信号以及其温度漂移影响输出零点的稳定。
[0074]
i-v变换方法的反馈高阻,是影响这种方法测量性能的重要因素。反馈电阻rf的阻值即为电路的放大倍数,因此较高稳定性的高阻,并精确获取其阻值,是保证i-v变换方法测量准确度的关键。反馈高阻rf的约翰逊
–
奈奎斯特等效电流噪声是影响i-v变换方法测量下限与分辨力的关键指标。电阻的约翰逊
–
奈奎斯特等效电流噪声是频谱很平的白噪声,它呈高斯分布,具有不可预见性和各态遍历性的特点,其表示为:
[0075][0076]
其中,k为波尔兹曼常数(1.38
×
10j/k);t为温度(单位:k),b为等效噪声带宽hz;r为电阻阻值ω。
[0077]
由此可知,若要减小电阻的等效噪声可以降低电阻的温度t和等效噪声带宽b,或增大电阻阻值r。因此,在电路的放大倍数,即反馈电阻rf确定的前提下,降低电阻温度和等效噪声带宽的方法是减小电阻等效电流噪声的有效方法。但是使电阻保持在足够低的温度具有一定的难度并且需要大量额外的设备,因此许多情况下是不允许或是不经济的。电阻的等效噪声带宽b是由电阻的阻值rf和电阻的寄生电容c的乘积,即时间常数t确定的,电阻的寄生电容cr一般较小(约几个pf),所以为了降低等效噪声带宽经常在反馈电阻两端加上反馈电容cf,其在反馈电路中还具有低通滤波器作用和抵消输人端寄生电容及线缆杂散电
容、提高电路稳定性的作用。降低等效噪声带宽b的代价是增加时间常数τ,从而使电路的响应时间增加,增加测量的时间成本。
[0078]
除了精选反馈电阻和电容,对运放的选择也起着至关重要的作用。因此此项目运放选用的是一款fa级(10-15a)输入偏置电流运算放大器ada4530-1,其工作电压范围是4.5v至16v,可采用常规5v和10v单电源以及
±
2.5v和
±
5v双电源系统供电。该器件提供超低输入偏置电流,并且在25℃和125℃下对输入偏置电流进行过生产测试,以确保器件达到用户系统的性能目标。集成式保护环缓冲器用于隔离输入引脚以防受到印刷电路板(pcb)漏电流的影响,而且能减少电路板组件数,简化系统设计。ada4530-1独特的引脚排列经过优化,可防止敏感输入引脚、电源和输出引脚之间的信号耦合,同时简化保护环走线的布线。
[0079]
综上所述,第一级电路的运算放大器反馈电容经过反复试验取值0.5pf,直流反馈电阻取值大于1g;信号输入采用fet三极管与恒流源连接的方式,实验证明可以明显提高输出信号的信噪比。第二级信号放大选择低噪音电流型运算放大器ad8011。经过ad8011输出的电压信号经过rc处理后送到比较器。rc并联和r串联的方式除了滤除直流偏置的作用,还能明显减少信号放大过后的下冲影响,对提高信号计数率很有必要。
[0080]
为了把信号送到主机进行计算与显示,还需要把模拟信号转成数字脉冲信号;
[0081]
如图8中,所述前放模块内部设置有整形滤波电路,以减小输出信号脉冲宽度,提高α/β探头的时间分辨能力,且探测器输出信号首先经过cr微分电路整形后,减少了脉冲快读,再经过有源带通滤波器组成的滤波电路;输出信号首先经过cr微分电路整形后,减少了脉冲快读,再经过有源带通滤波器组成的滤波电路,进一步降低噪声;
[0082]
其中低波滤波电路包括运算放大器、电阻、电容和光敏二极管,且运算放大器同相输入端连接地线,运算反相输入端与输出端之间连接并联设置的电阻和电容,且运算放大器反相输入端连接有光敏二极管,且单向输入端远端连接地;
[0083]
同时,所述前放模块内部还设置有积分电路和甄别电路,且输出信号经积分电路后采用脉冲幅度甄别的方式将α粒子和β粒子脉冲区分开来。其中由于α射线和β射线的部分能谱重合,在测量α、β粒子活度时难免发生串道现象,影响探测数据的准确性,为减弱串道现象的影响,如图9中所示设计了积分电路;
[0084]
其中整形滤波电路整体由cr微分电路连接低波滤波电路构成;
[0085]
其中积分电路采用反相积分电路,其输入信号经过了一个电阻后经过反馈流到电容上;
[0086]
其中甄别电路输入端一侧依次两个电位器rv3和rv1进行输出,且同侧连接运算放大器au,此运算放大器依次连接两个电位器rv4和rv2,其中电位器rv1和电位器rv2之间连接有电阻r1,所述运算放大器au连接电阻r2后与运算放大器du连接输出上阈电流vu;
[0087]
其中甄别电路输入端另一侧连接电阻后连接运算放大器al输出下阈vl,且下阈vl电流连接电阻r2后与运算放大器dl连接输出下阈电压vl,且下阈电压vl连接非门逻辑电路后通过与非门逻辑电路进行电流输出,并且下阈电压vl连接非门后同时连接或非门逻辑电路进行电流输出。
[0088]
此外,在具体的应用场景中,如图10中当且仅当输入信号脉冲幅度介于给定的电压范围vl-vu才输出信号脉冲。上阈vu与下阈vl之差为道宽,以h表示
[0089]
所有输入信号可按其幅度vi的大小分为三类:大于上阈、小于下阈以及介于上下阈之间。对于单道分析器而言,当且仅当第三类信号输入时才有输出信号。但考虑到输入信号具有上升时间和下降时间,导致电路在时序上存在逻辑问题。由于上阈比下阈高,下甄别器的输出信号比上甄别器的输出信号出现得早而结束得晚,上甄别器的输出信号并不能完全禁止下甄别器的信号输出。在输入信号的前后沿会输出假信号,造成逻辑上的错误。
[0090]
根据上述分析,设计的单道脉冲幅度甄别器原理图如图11所示。上甄别器du和下甄别器dl的参考电压分别由低阻输出的运算放大器au和al提供。au的输入端同时加有下阈电位vl和道宽电压h,au输出电压为vu=vl+h,al输出电压为vl。vl和vh的调节范围可以分别独立调节。由于调节vl和h的电位器阻值远小于r,两电位器的度盘读数和电压vl、h之间有良好的线性。电位器rv1和rv2作用是校正下阈和道宽度盘刻度。反馈电路有隔直流电容,避免了vu和vl对甄别阈的影响;
[0091]
所述前放模块的信号成型采用低噪音电流型运算放大器,所述运算放大器的工作电压范围是4.5v-16v,且运算放大器采用5v和10v单电源以及
±
2.5v和
±
5v双电源系统供电,所述低噪音电流型运算放大器的型号为ad8011,所述ad8011输出的电压信号通过rc处理后送到比较器。所述前放模块的pcb布局设计采用保护环方式,所述pcb布局设计的过程中采用模拟信号部分和数字信号部分单点通过磁珠连接的方式进行隔离,所述保护环是覆铜形状,所述保护环可完全包围从传感器连接到同相输入的高阻抗走线。所述前放模块通过脉冲信号连接信号处理模块与mcu之间交互,且信号处理模块对钝化注入硅半导体探测器探测到的辐射信号进行处理。
[0092]
进一步的,所述信息处理系统传感器单元包括速度传感器、电感传感器、激光传感器以及北斗定位模块,用于获取位置、速度信息;所述信息处理系统视觉单元为固定在机器人顶部位置的6目全方位红外摄像机;所述信息处理系统信息处理系统通过无线传输单元连接军用电脑构成远程操控;
[0093]
其中,在具体的应用场景中,保证机器人在检测过程中的安全可靠性,且通过处理器8连接6目全方位摄像机3进行视觉连接,从而能够进行画面监控,
[0094]
在具体的应用场景中,遥控和信息处理单元作为整体控制系统的核心,用来实现对控制指令的下发以及现场机器人作业情况的实时监测。该计算机采用军用加固笔记本电脑,其防护等级高,通过ip65认证,适用于恶劣环境。采用ft-2000/4四核心/八线程主频2.6ghz处理器,15.6"tflcdfhd(1920x1080),512g固态硬盘,8gddr4内存。具备四组usb3.0端口、两组串行端口、双以太网络双端口与vga端口等,还可扩展pci或pcie扩展卡,具备较强的扩展能力。利用高级语言对机器人的管控一体化软件进行开发,可实现机器人运动控制指令的下发以及机器人关键技术参数、现场实时图像信息、探测器数据的实时处理以及图形化显示
[0095]
此外,车体控制器采用紧凑型总线控制板,能耗低,体积小。具有rs232,rs485,ttl,canopen等丰富的通讯接口,以及多路用于传感器信息采集及开关量控制的io端口。机器人控制器安装在机器人上,随机器人一起运动。采用上下两层分布式控制结构,由主控制器,运动控制模块,传感器及开关量处理模块,以及扩展模块等组成。主控制器位于上层,一方面通过can总线与下层各伺服控制模块进行通信,另一方面通过基于rs-485总线远程遥控发射端和接收端进行通信,可实现无线和有线双制式控制;
[0096]
并且,其中无线信号传输单元采用无线图传、数传一体化传输模块,该模块融合图传、数传以及控制信息于一体,最大的传输距离可达5km,该模块采用双向通道加密技术,最大下行吞吐量可达12mbps,可传输1080p@60帧高清视频,延时时间为300ms,最大功率2w,该模块具有可靠的下行内信息传输通道,有效的保障了机器人与控制端的信息交互的可靠性与实时性。
[0097]
综上所述:如图1-13所示,在使用该利用爬壁机器人污染源识别及信息处理系统时,通过处理系统控制运动控制单元进行机器人整体的行进,且通过机器人顶部安装的视觉单元进行摄像采集,并且通过底部设置的监测单元进行检测;
[0098]
同时,行进过程中,传感器单元中的速度传感器、电感传感器、激光传感器以及北斗定位模块,用于获取位置、速度信息;且信息处理系统通过无线传输单元连接军用电脑构成远程操控;
[0099]
辐射探测器将探测的信息传输到前放模块上,辐射探测器在使用过程中通过高压保护电路和输入保护电路,前放模块对输出信号进行iv转换、整形、滤波和放大,iv转换将该输出信号转换并放大为一个幅值较大的电压信号,之后测量该放大的电压信号,利用该放大的电压信号即可计算出输出信号的数据,之后通过信号处理模块对探测的输出信号进行处理,并通过信号处理模块整理处探测的输出信号和温度变化的关系,从而得出探测器信号处理模块和温度之间的函数关系,后期通过温度传感器的值,就可以对探测的输出信号进行阈值修正,之后将探测的输出信号传输到系统控制单元mcu上,mcu数据处理后传输到系统显示主机单元上,主机单元采用军用加固笔记本电脑,之后主机单元能够显示出探测的输出信号的图像,从而能够安全稳定的将辐射探测器探测的信号进行转换传输,并在系统主机上显示出辐射探测器探测的数据,这就是该利用爬壁机器人污染源识别及信息处理系统的特点。
[0100]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1