一种基于机器视觉的建筑物裂缝智能检测系统的制作方法
1.本发明是一种基于机器视觉的建筑物裂缝智能检测系统,属于建筑检测领域。
背景技术:
2.路面、桥梁、墙体等建筑在长期使用过程中会逐渐出现裂缝,如果未及时进行检测维护,将会给建筑整体带来较大的安全隐患,因此基于裂缝进行建筑情况评估是工程维护中重要的一环,而其中对裂缝情况的分析是评估中较常使用到的指标,但是现有技术对于弧状的柱体轮胎完全贴合使其难以进行攀爬固定。
技术实现要素:
3.为了实现上述目的,本发明是通过如下的技术方案来实现:一种基于机器视觉的建筑物裂缝智能检测系统,其结构墙体、导向轮、滚轮、爪臂装置、平衡扇、机壳主体,所述导向轮安装于机壳主体前端,所述滚轮安装于机壳主体上,所述爪臂装置安装于机壳主体两侧,所述平衡扇安装于机壳主体背面,所述爪臂装置面向导向轮且可通过转动使其面向机壳主体的底面。
4.为优化上述技术方案,进一步采取的措施为:根据一种优选方式,所述爪臂装置包括爪臂、连接杆、转向电机、伸缩齿轮、伸缩转筒、伸缩电机、伸缩转杆、转盘,所述爪臂与伸缩转杆铰链连接,所述连接杆与转盘固定连接,所述转盘设有两个且之间通过连接轴与连接筒,所述连接轴外侧设有长条的锯齿,连接筒内壁设有长条状的凹槽,该连接轴锯齿位于连接筒内壁,该连接筒上设有齿轮所述转向电机该齿轮啮合,所述伸缩转杆一端设有螺纹,所述伸缩齿轮与伸缩转筒固定连接,所述伸缩转筒为中空状,且内壁设有内螺纹并与伸缩转杆螺纹连接,所述伸缩电机与伸缩齿轮相啮合。
5.根据一种优选方式,所述连接杆一侧设有弧状的凹槽,所述凹槽位于机壳主体侧面。
6.根据一种优选方式,所述滚轮具有粗糙的花纹。
7.根据一种优选方式,所述平衡扇分为多组并设有若干个,由独立的模块系统进行控制。
8.根据一种优选方式,所述导向轮连接导向模块,该导向模块包括有变向装置。
9.有益效果本发明通过滚轮滚动实现设备移动,并通过导向轮进行移动转向,而通过平衡扇实现设备的贴墙移动,在攀爬柱状体时,转向电机转动,使其转盘转动带动连接杆拉动爪臂转动,使其爪臂面向柱体,而后通过伸缩电机转动通过伸缩齿轮与伸缩转筒的啮合,将爪臂对柱体进行夹紧,适用于各种环境下的建筑物裂缝检测,使其可攀爬各种墙体,并通过爪臂装置可攀爬圆柱状的柱体,使其检测更加全面。
附图说明
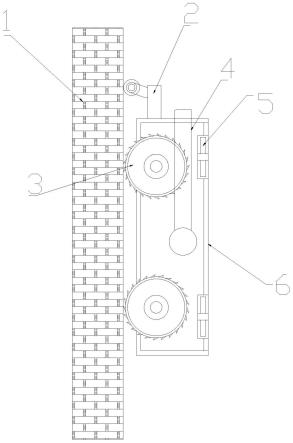
10.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中的附图作详细地介绍,以此让本发明的其它特征、目的和优点将会变得更明显:图1为本发明一种基于机器视觉的建筑物裂缝智能检测系统的结构示意图。
11.图2为本发明一种基于机器视觉的建筑物裂缝智能检测系统爪臂装置的结构示意图。
12.图3为本发明一种基于机器视觉的建筑物裂缝智能检测系统凹槽的结构示意图。
13.图4为本发明一种基于机器视觉的建筑物裂缝智能检测系统连接轴与连接筒的结构示意图。
具体实施方式
14.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
15.请参阅图1-图4,本发明提供一种基于机器视觉的建筑物裂缝智能检测系统:其结构墙体1、导向轮2、滚轮3、爪臂装置4、平衡扇5、机壳主体6,所述导向轮2安装于机壳主体6前端,所述滚轮3安装于机壳主体6上,所述爪臂装置4安装于机壳主体6两侧,所述平衡扇5安装于机壳主体6背面,所述爪臂装置4面向导向轮2且可通过转动使其面向机壳主体6的底面,所述爪臂装置4包括爪臂41、连接杆42、转向电机43、伸缩齿轮44、伸缩转筒45、伸缩电机46、伸缩转杆47、转盘48,所述爪臂41与伸缩转杆47铰链连接,所述连接杆42与转盘48固定连接,所述转盘48设有两个且之间通过连接轴7与连接筒8,所述连接轴7外侧设有长条的锯齿,连接筒8内壁设有长条状的凹槽,该连接轴7锯齿位于连接筒8内壁,该连接筒8上设有齿轮所述转向电机43该齿轮啮合,所述伸缩转杆47一端设有螺纹,所述伸缩齿轮44与伸缩转筒45固定连接,所述伸缩转筒45为中空状,且内壁设有内螺纹并与伸缩转杆47螺纹连接,所述伸缩电机46与伸缩齿轮44相啮合,所述凹槽49位于机壳主体6侧面,所述滚轮3具有粗糙的花纹,所述平衡扇5分为多组并设有若干个,由独立的模块系统进行控制,所述导向轮2连接导向模块,该导向模块包括有变向装置,所述机壳主体6周围设有多个视觉裂缝传感设备,用于检测墙体裂缝。
16.工作原理;通过滚轮3滚动实现设备移动,并通过导向轮2进行移动转向,而通过平衡扇5实现设备的贴墙移动,在攀爬柱状体时,转向电机43转动,使其转盘48转动带动连接杆42拉动爪臂41转动,使其爪臂41面向柱体,而后通过伸缩电机46转动通过伸缩齿轮44与伸缩转筒45的啮合,将爪臂41对柱体进行夹紧。
17.本专利所说的控制滚轮3、导向轮2、爪臂装置4、平衡扇5的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本发明主要用来保护机械装置,所以本发明不再详细解释控制方式和电路连接。
18.本文中所描述的具体实施例仅仅是对本发明作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的或者超越所附权利要求书所定义的范围。
技术特征:
1.一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:其结构墙体(1)、导向轮(2)、滚轮(3)、爪臂装置(4)、平衡扇(5)、机壳主体(6),所述导向轮(2)安装于机壳主体(6)前端,所述滚轮(3)安装于机壳主体(6)上,所述爪臂装置(4)安装于机壳主体(6)两侧,所述平衡扇(5)安装于机壳主体(6)背面,所述爪臂装置(4)面向导向轮(2)且可通过转动使其面向机壳主体(6)的底面。2.根据权利要求1所述的一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:所述爪臂装置(4)包括爪臂(41)、连接杆(42)、转向电机(43)、伸缩齿轮(44)、伸缩转筒(45)、伸缩电机(46)、伸缩转杆(47)、转盘(48),所述爪臂(41)与伸缩转杆(47)铰链连接,所述连接杆(42)与转盘(48)固定连接,所述转盘(48)设有两个且之间通过连接轴(7)与连接筒(8),所述连接轴(7)外侧设有长条的锯齿,连接筒(8)内壁设有长条状的凹槽,该连接轴(7)锯齿位于连接筒(8)内壁,该连接筒(8)上设有齿轮所述转向电机(43)该齿轮啮合,所述伸缩转杆(47)一端设有螺纹,所述伸缩齿轮(44)与伸缩转筒(45)固定连接,所述伸缩转筒(45)为中空状,且内壁设有内螺纹并与伸缩转杆(47)螺纹连接,所述伸缩电机(46)与伸缩齿轮(44)相啮合。3.根据权利要求2所述的一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:所述连接杆(42)一侧设有弧状的凹槽(49),所述凹槽(49)位于机壳主体(6)侧面。4.根据权利要求1所述的一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:所述滚轮(3)具有粗糙的花纹。5.根据权利要求1所述的一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:所述平衡扇(5)分为多组并设有若干个,由独立的模块系统进行控制。6.根据权利要求1所述的一种基于机器视觉的建筑物裂缝智能检测系统,其特征在于:所述导向轮(2)连接导向模块,该导向模块包括有变向装置。
技术总结
本发明公开了一种基于机器视觉的建筑物裂缝智能检测系统,属于建筑检测领域,其结构墙体、导向轮、滚轮、爪臂装置、平衡扇、机壳主体,所述导向轮安装于机壳主体前端,所述滚轮安装于机壳主体上,所述爪臂装置安装于机壳主体两侧,所述平衡扇安装于机壳主体背面,所述爪臂装置面向导向轮且可通过转动使其面向机壳主体的底面,本发明适用于各种环境下的建筑物裂缝检测,使其可攀爬各种墙体,并通过爪臂装置可攀爬圆柱状的柱体,使其检测更加全面。使其检测更加全面。使其检测更加全面。
技术研发人员:郑杰圣 卢志勇 任伟军
受保护的技术使用者:福建省宏实建设工程质量检测有限公司
技术研发日:2022.04.21
技术公布日:2022/7/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1