一种多线激光雷达设备的制作方法
1.本技术属于激光探测技术领域,具体涉及一种多线激光雷达设备。
背景技术:
2.目前,激光雷达系统主要采用多线激光雷达实现对各方向上的目标物体的特征扫描和测量,然后根据接收到的回波激光信号还原扫描到的点云图像。
3.但是,传统的平面阵列式扫描方式,只是将反射回来的激光信号简单的进行点云图像还原,对于汽车探测前行路况而言,清晰度远远不能满足要求。而要提高整幅画面的清晰度,又带来硬件成本的大幅提升,及点云图像处理算法的巨大改进,处理效率还要降低。
4.对于车载激光雷达而言,在进行全景扫描探测的同时,更需要对探测范围内的重点目标的重点探测,在保证数据处理效率的同时,能够根据对象具体情况做出对应处理。
技术实现要素:
5.本技术提出了一种多线激光雷达设备,在传统扫描模式的基础上,增加第二套扫描数据处理方式,以提示重点探测目标的清晰度。
6.为实现上述目的,本技术提供了如下方案:
7.一种多线激光雷达设备,包括激光发射装置、第一激光接收装置、第二激光接收装置、激光扫描控制模块和扫描图像单元;
8.所述激光发射装置用于发射探测物体用的第一激光束和第二激光束;
9.所述第一激光接收装置用于接收所述第一激光束被探测物体反射后形成的第一回波激光束;
10.所述第二激光接收装置用于接收所述第二激光束被探测物体反射后形成的第二回波激光束;
11.所述激光扫描控制模块用于控制所述激光发射装置的激光发射模式;
12.所述扫描图像单元用于根据所述激光发射模式,对所述第一回波激光束和第二回波激光束进行图像处理,生成探测物体点云图像。
13.优选的,所述激光发射装置包括激光激发单元和反射镜单元;
14.所述激光激发单元用于产生所述第一激光束和所述第二激光束;
15.所述反射镜单元用于按照预设转动规则,将所述第一激光束和所述第二激光束反射向所述激光发射装置前方。
16.优选的,所述反射镜单元包括第一反射镜单元和第二反射镜单元;
17.所述激光激发单元包括单激光源和分束器;
18.所述单激光源发出的激光束经所述分束器,形成所述第一激光束和所述第二激光束;
19.所述第一反射镜单元用于反射所述第一激光束,所述第二反射镜单元用于反射所述第二激光束。
20.优选的,所述反射镜单元包括第一反射镜单元和第二反射镜单元;
21.所述激光激发单元包括第一激光源和第二激光源;
22.所述第一激光源用于产生所述第一激光束;
23.所述第二激光源用于产生所述第二激光束;
24.所述第一反射镜单元用于反射所述第一激光束,所述第二反射镜单元用于反射所述第二激光束。
25.优选的,所述反射镜单元包括横向反射镜和纵向反射镜;
26.所述横向反射镜用于将所述第一激光束或所述第二激光束进行横向反射;
27.所述纵向反射镜用于将所述第一激光束或所述第二激光束进行纵向反射。
28.优选的,所述激光发射模式包括全景模式和重点模式;
29.所述全景模式为仅由所述第一激光束扫描探测区域,此时所述激光扫描控制模块生成全景扫描指令,并通过所述全景扫描指令控制所述第一反射镜单元反射所述第一激光束进行全景扫描;
30.所述重点模式为由所述第一激光束扫描探测区域,同时由所述第二激光束扫描探测物体,此时所述激光扫描控制模块根据重点探测信号生成重点扫描指令,并通过所述重点扫描指令控制所述第一反射镜单元反射所述第一激光束进行全景扫描,以及控制第二反射镜单元反射所述第二激光束进行疑似物体扫描。
31.优选的,所述扫描图像单元包括全景分析单元和图像重组单元;
32.所述全景分析单元用于根据所述第一回波激光束生成全景点云图像,并对所述全景点云图像进行疑似物体分析;
33.所述图像重组单元用于输出所述全景点云图像。
34.优选的,当所述全景分析单元发现所述全景点云图像中存在疑似物体时,生成所述重点探测信号,并发送至所述激光扫描控制模块;
35.所述图像重组单元还用于通过所述第二激光接收装置,接收所述第二回波激光束,生成疑似物体点云图像,并将所述疑似物体点云图像与所述全景点云图像进行比对,得到确认物体信息。
36.本技术的有益效果为:
37.本技术公开了一种多线激光雷达设备,在传统扫描模式的基础上,增加了图像重点目标的初步分析,和第二套扫描模式,在保留全景扫描的同时,能够对重点目标区域进行针对性的重点扫描,使得重点目标能够更清晰的呈现在全景点云图像中,便于后期对扫描点云图像的进一步分析和处理,有利于行车安全。
附图说明
38.为了更清楚地说明本技术的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
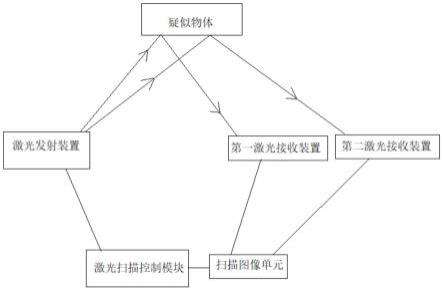
39.图1为本技术实施例的多线激光雷达设备主要组成部分示意图。
具体实施方式
40.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
41.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
42.如图1所示,为本技术实施例的多线激光雷达设备主要组成部分示意图,本实施例的多线激光雷达设备,主要包括激光发射装置、第一激光接收装置、第二激光接收装置、激光扫描控制模块和扫描图像单元。
43.其中,激光发射装置用于发射探测物体用的第一激光束和第二激光束;第一激光接收装置用于接收第一激光束被探测物体反射后形成的第一回波激光束;第二激光接收装置用于接收第二激光束被探测物体反射后形成的第二回波激光束;激光扫描控制模块用于控制激光发射装置的激光发射模式;扫描图像单元用于根据激光发射模式,对第一回波激光束和第二回波激光束进行图像处理,生成探测物体点云图像。
44.下面,具体介绍在本实施例中,各个功能装置的结构组成和功能实现:
45.激光发射装置用于发射激光,其中的激光激发设备采用常规技术,在此不再赘述。另外,目前的车载激光发射多采用反射镜结构,本技术技术方案也不例外,因此,在主要的原理和结构方面,本实施例参考并借鉴了现有技术方案。
46.本技术的改进重点在于激光发射装置发射出去的是两束激光,一束激光用于车辆前方的全景扫描,采用与现有常规扫描方式类似的技术方案,第二束激光则只针对重点目标进行扫描,用于弥补全景扫描点云图像清晰度较低的弊端。
47.在本实施例中,整体上,激光发射装置包括激光激发单元和反射镜单元。激光激发单元用于产生第一激光束和第二激光束。反射镜单元用于按照预设转动规则,将第一激光束和第二激光束反射向激光发射装置前方。
48.本实施例中的激光发射装置,可采用两种技术方案,生成两束激光。
49.第一种方式,激光激发单元包括单激光源和分束器,反射镜单元包括第一反射镜单元和第二反射镜单元。单激光源发出的激光束经分束器,形成第一激光束和第二激光束。第一反射镜单元用于反射第一激光束,第二反射镜单元用于反射第二激光束。由此可向车辆前方发射两束激光束,其中,第一激光束用于全景扫描,第二激光束用于重点目标扫描。
50.第二种方式,激光激发单元包括第一激光源和第二激光源两个激发光源,反射镜单元包括第一反射镜单元和第二反射镜单元。第一激光源用于产生第一激光束,并经第一反射镜反射,用于全景扫描。第二激光源用于产生第二激光束,并经第二反射镜反射,用于重点目标扫描。
51.两种实现方式中,反射镜单元均包括横向反射镜和纵向反射镜。其中,横向反射镜用于将第一激光束或第二激光束进行横向反射。纵向反射镜用于将第一激光束或第二激光束进行纵向反射。横向反射镜通过横向的角度转动,可以将激光束沿横向方向产生角度偏转,反射出去,形成横向扫描,纵向反射镜通过纵向的角度转动,可以将激光束沿纵方向产生角度偏转,反射出去,形成纵向扫描。两个反射镜角度转动的技术方案,均参考了现有技
术,在此不再赘述。
52.下面,重点阐述本技术技术方案中的激光发射模式。
53.激光发射模式包括全景模式和重点模式。
54.全景模式为仅由第一激光束扫描探测区域,此时激光扫描控制模块生成全景扫描指令,并通过全景扫描指令控制第一反射镜单元反射第一激光束进行全景扫描。
55.重点模式为由第一激光束扫描探测区域,同时由第二激光束扫描探测物体,此时激光扫描控制模块根据重点探测信号生成重点扫描指令,并通过重点扫描指令控制第一反射镜单元反射第一激光束进行全景扫描,以及控制第二反射镜单元反射第二激光束进行疑似物体扫描。
56.在此模式基础上,本实施例扫描图像单元由全景分析单元和图像重组单元组成。其中,全景分析单元用于根据第一回波激光束生成全景点云图像,并对全景点云图像进行疑似物体分析。图像重组单元用于输出全景点云图像。
57.当全景分析单元发现全景点云图像中存在疑似物体时,生成重点探测信号,并发送至激光扫描控制模块。
58.图像重组单元还用于通过第二激光接收装置,接收第二回波激光束,生成疑似物体点云图像,并将疑似物体点云图像与全景点云图像进行比对,得到确认物体信息。
59.下面,以具体的路面情况为例,阐述上述过程。
60.车辆前行过程中,激光扫描控制模块先是生成全景扫描指令,此时激光发射装置中的第一激光束在第一反射镜单元的反射作用下,对车辆前方路况进行全景扫描。第二反射镜单元偏转到一个死角角度,使得第二激光束不向车前反射。
61.第一激光束经行车前方物体反射后,形成第一回波激光束,此时,激光接收装置接收第一回波激光束,全景分析单元根据第一回波激光束生成全景点云图像,并对全景点云图像中的疑似物体进行分析。可采用的分析方法,例如,根据第一回波激光束形成的全景点云图像中,不同点云位置的功率,勾画出疑似物体轮廓。
62.在本实施例中,全景分析单元并不对全景点云图像中的所有点云内容进行分析,而是对一定距离范围内的点云图像内容进行分析,技术思想在于:如果物体距离车辆较远,则车辆与物体间并不会产生相互危险,也就不必重点探测。此时,图像重组单元直接输出该全景点云图像。
63.若全景分析单元在该全景点云图像中发现疑似物体时,则生成重点探测信号,信号内容主要包括疑似物体在全景点云图像中的位置及与车辆的距离,并发送至激光扫描控制模块。
64.激光扫描控制模块根据接收到的重点探测信号后,生成重点扫描指令,一方面,继续控制并维持第一反射镜单元反射第一激光束进行全景扫描,同时,控制第二反射镜单元反射第二激光束对疑似物体进行单独扫描,第二激光束被疑似物体反射后,形成第二回波激光束。
65.第二激光接收装置接收第二回波激光束,图像重组单元根据接收到的第二回波激光束,生成疑似物体点云图像,并将疑似物体点云图像与全景点云图像进行同位置比对(同位置比对采用常规技术方案),若一致,则得到确认物体信息;若不一致,则认为该处不存在疑似物体。
66.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1